
Fターム[2F112AB07]の内容
Fターム[2F112AB07]に分類される特許
1 - 20 / 80
合焦位置を決定する方法及びビジョン検査システム
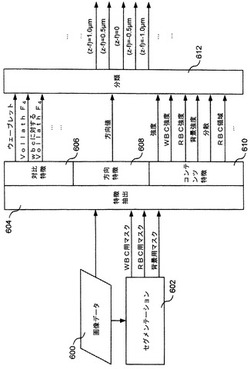
【課題】試料位置と合焦位置との間の差分を求める方法を提供する。
【解決手段】試料を示す画像データを獲得するステップと、獲得データから特徴セットを抽出するステップと、画像データ特徴を位置差分値に関連付けるように教え込まれた機械学習アルゴリズムを用いることにより、特徴セットを位置差分値に分類するステップとを含み、位置差分値が差分に対応する。任意に、特徴セットは対比特徴のサブセットを含みうる。任意に、対比特徴のサブセットは、画像データに基づく二乗勾配関数、画像データに基づくウェーブレット関数及び画像データに基づく自己相関関数、例えば、VollathのF4関数若しくはVollathのF4関数とVollathのF5関数との組合せ、全画像データの分散及び並びにLaplaceベースの焦点測定からなる群より選択されうる。
(もっと読む)
画像処理装置および画像処理方法、プログラム

【課題】多眼方式の撮像装置で取得された画像群から、主被写体と背景を含む距離画像を提供する。
【解決手段】本発明に係る画像処理装置は、合焦位置が異なる複数の光学系を有する多眼方式の撮像装置によって撮像された複数の画像を取得する画像取得部(401)と、撮像装置によって撮像された複数の画像それぞれについて合焦画像となる領域を選択する合焦画像選択部(404)と、合焦画像選択部で選択された複数の合焦画像を使用して距離を算出する距離算出部(405)と、を備えたことを特徴とする。
(もっと読む)
撮像装置および距離情報取得方法
【課題】撮影画像各部における被写体までの距離を正確に把握し、距離に基づきぼかし処理を施す。
【解決手段】測光スイッチS1がオンされると(S100)、レンズを駆動し複数の位置に焦点を合せながら各位置でのスルー画像をメモリに記憶する(S102)。AF処理における合焦位置にフォーカス(S104)する。レリーズスイッチS2がオンされると同合焦位置で主画像の撮影を行う。記憶された複数のスルー画像の各々を手ブレに応じた大きさの領域に分割し、撮影画像における各領域に対応する被写体までの距離情報を把握し、距離マップを作成する(S114)。距離マップに基づきマスクを作成し(S116)、被写体までの距離に応じたぼかし処理を施す(S118)。
(もっと読む)
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
電子カメラ、画像表示装置、プログラム及び記録媒体
【課題】 本発明は、装置が大型化せず、簡単な構成でサイズ情報を容易に取得し、そのサイズ情報を記録用画像に関連付ける手段を提供する。
【解決手段】 電子カメラは、撮像部と、認識部と、選択部と、第1算出部と、第2算出部と、記録処理部とを備える。撮像部は、撮影光学系を介して被写体の像を撮像する。認識部は、撮像部が生成する第1画像から主要被写体を認識する。選択部は、主要被写体に応じた複数の測定点を選択する。第1算出部は、選択部が選択した測定点ごとに、各々の測定点に対し距離を算出する。第2算出部は、第1算出部が算出した各々の距離に応じて主要被写体の大きさを示すサイズ情報を算出する。記録処理部は、撮像部が生成する記録用の第2画像とサイズ情報とを関連付けてメモリに記録する。
(もっと読む)
固体撮像装置および携帯情報端末
【課題】複数のマイクロレンズを有していても、補正を容易に行うことが可能で、かつ距離推定や画像再構成における誤差および画質劣化を抑制することのできる固体撮像装置および携帯情報端末を提供する。
【解決手段】本実施形態の固体撮像装置は、被写体を結像面に結像する第1の光学系と、複数画素を含む複数の画素ブロックを有する撮像領域を備えた撮像素子と、前記複数の画素ブロックに対応して設けられた複数のマイクロレンズを有するマイクロレンズアレイを含み、前記結像面に結像される予定の像を、個々のマイクロレンズに対応する画素ブロックに縮小再結像する第2の光学系と、前記撮像素子によって得られた前記被写体の画像信号を用いて、前記各マイクロレンズと前記画素ブロックとの光学位置関係を補正した画像信号処理を行う信号処理部と、を備えている。
(もっと読む)
距離測定装置及びカメラ
【課題】距離を正確かつ安全に測定することができる距離測定装置及びカメラを提供する。
【解決手段】オートフォーカス機能によって取得された画像データの画像処理を行って顔を検出し、顔以外の部分にレーザ光を照射して人Mまでの距離を測定する。正確な距離情報が得られたフォーカスエリアFAと他のフォーカスエリアFAとの差分からすべてのフォーカスエリアFAにある物体までの距離を算出し、ファインダ枠50内の全部の物体までの距離情報を取得する。
(もっと読む)
撮像装置
【課題】画角内の輝度差が大きい場合であっても正確なデプスマップを得られる撮像装置を提供する。
【解決手段】所定の焦点面の近傍に二次元状に配置された複数の正レンズと、複数の正レンズの各々に対応して当該正レンズの後側に配置された複数の受光素子を有する第1の撮像素子と、複数の正レンズの各々について、前記第1の撮像素子の出力から、当該正レンズに像が結ばれた被写体までの距離を表す値を算出する距離算出手段と、第1の撮像素子に複数回の撮像をそれぞれ異なる電荷蓄積時間で連続して行わせる制御手段と、前記第1の撮像素子により連続して行われた複数回の撮像の各々についてデプスマップを作成するデプスマップ作成手段と、デプスマップ作成手段により作成された複数回の撮像にそれぞれ対応する複数のデプスマップを合成して合成デプスマップを作成する合成手段と、を備える撮像装置。
(もっと読む)
測距装置と方法とプログラム並びに撮像装置と方法とプログラム
【課題】 AF処理が不要な状態が検知されたときに、測距装置の動作に用いる複数の電源のうち、特定の電源供給を停止して電力消費を低減する測距装置および同装置を備える撮像装置に関する。
【解決手段】 被写体からの入射光を結像する第1測距レンズおよび第2測距レンズで結像される被写体像に応じた第1測距信号を出力する第1測距素子と第2測距素子を備え、第1測距信号と第2測距信号とに基づいて被写体までの距離を特定する主制御装置と通知可能で、第1測距信号と第2測距信号とを主制御装置のインターフェース用に変換する画像変換部と、画像変換部に供給される電力を制御する電源制御部と、を有し、電源制御部は通常モードから省電力モードに移行するときに、画像変換部への電力供給を停止する、測距装置による。
(もっと読む)
画像測定装置
【課題】高精度かつ高速なオートフォーカス処理を可能にする。
【解決手段】画像測定装置は、ワークを撮像するフレームレートが可変の撮像装置と、前記ワークに対して光を照射する照明装置と、前記撮像装置の合焦位置を制御して前記合焦位置を合焦軸方向の位置情報として出力する位置制御システムと、前記位置制御システムによる合焦位置の制御に際して前記撮像装置のフレームレートを制御すると共に、前記撮像装置のフレームレートに応じて前記照明装置の光量を調整する制御装置とを備える。
(もっと読む)
画像処理装置およびその方法
【課題】撮像データから被写体の実距離を高精度に推定する。
【解決手段】距離推定部200は、点対称性をもたない開口を有する絞りを備えた撮像光学系を用いて撮像された撮像データを入力し、撮像データを撮像した前記撮像光学系の撮像パラメータを取得する。スペクトル計算部701は、撮像データのスペクトルを算出する。スペクトルモデル生成部702は、撮像パラメータおよび被写体距離に対応する光学特性情報、並びに、スペクトルモデルを用いて、撮像データに対応するスペクトルモデルである予測モデルを生成する。評価関数生成部707は、撮像データのスペクトルおよび予測モデルを使用して評価関数を生成する。距離推定部200は、評価関数および統計的手法を用いて、撮像データが表す画像に含まれる被写体の実距離を推定する。
(もっと読む)
撮影システムおよびレンズ装置
【課題】 複数の被写体に対してフォーカシングを行うことなく、複数の被写体のある基準位置からの距離を精度よく、かつ連続的に算出することができるようにした撮影システムおよびレンズ装置を提供する。
【解決手段】 撮影システムは、レンズ装置1と、該レンズ装置1を用いて撮影を行うカメラ2とを含む撮影システムであって、被写体像間の位相差を検出する位相差センサーが構成された焦点検出部102を有し、複数の測距エリアをもって多点測距可能な位相差方式のオートフォーカスレンズにおいて、各測距点ごとの被写体距離、および被写体間距離を生成する距離情報生成手段と、ある基準位置からの距離情報を認識する距離情報認識手段と、前記距離情報から各被写体の前記基準位置からの距離を算出する被写体距離演算手段と、撮影システムの移動速度を算出する移動速度算出手段と、算出された距離情報を記憶、更新する記憶更新手段と、記憶、更新された距離情報を出力する距離情報出力手段を有する。
(もっと読む)
電子機器
【課題】精度の良い被写体距離の検出可能範囲を拡大する。
【解決手段】撮像装置1は視差の有する撮像部11及び21を有し、撮像部11及び21の撮影によって第1及び第2入力画像を得る。第1距離検出部51は、同時撮影された第1及び第2入力画像からステレオビジョン法によって距離検出を行い、第1距離検出結果を出力する。第2距離検出部52は、第1距離検出部で用いられる距離検出方法とは異なる検出方法にて距離検出を行い、第2距離検出結果を出力する。第2距離検出部52は、例えば、近接被写体に対しても距離検出を行うことのできるSFM(Structure From Motion)を用いて距離検出を行う。統合部53は、第1及び第2距離検出結果を統合することで出力距離情報を生成する。
(もっと読む)
測距装置および撮像装置
【課題】 2つの測距用撮像素子のそれぞれから出力される画像データの出力タイミングを補正することで、精度を向上させることができる測距装置および同装置を搭載した撮像装置に関する。
【解決手段】 被写体像に応じた画像信号を出力する第1撮像素子および第2撮像素子を第1の制御信号を用いて駆動したとき、第1撮像素子が出力を開始した時から第2撮像素子が出力を開始した時までの第1時間と、第2撮像素子が出力を開始した時から第1撮像素子が出力を開始した時までの第2時間と時間を計測し、この計測された時間が一定値以上か否かを判定することで、第1撮像素子と第2撮像素子の駆動タイミングの補正値を決定し、第1撮像素子と第2撮像素子の画像出力タイミングを合わせる測距装置による。
(もっと読む)
固体撮像装置
【課題】被写体までの距離の分解能が高い固体撮像装置を提供する。
【解決手段】本実施形態の固体撮像装置は、それぞれが複数の画素を含む複数の画素ブロックを有する撮像領域を備えた撮像素子と、被写体からの光を結像面に結像する結像レンズと、前記複数の画素ブロックに対応して設けられ、それぞれが開口部と遮蔽部とを有する複数のアパーチャ要素を含んでいる。各アパーチャ要素は前記結像レンズからの光をフィルタリングする、アパーチャと、前記複数のアパーチャ要素に対応して設けられた複数のマイクロレンズを有している。各マイクロレンズは、対応するアパーチャ要素によってフィルタリングされた光を前記撮像領域に結像するマイクロレンズアレイと、前記撮像領域に撮像された画像の信号を処理し、前記被写体までの距離を推定する信号処理回路と、を備えている。
(もっと読む)
2光束アッセンブリ及びクロマティックポイントセンサ装置の動作方法
【課題】2つの表面領域を同期測定できるクロマティックポイントセンサ装置(CPS装置)の動作方法を提供すること。
【解決手段】2光束アッセンブリが取り付けられた1光束CPS光学ペンを用いたセンサ装置の第1測定光束および第2測定光束を、それぞれ第1表面領域および第2表面領域に位置合わせする。2つの反射光が2光束CPSの共焦点開口部を通過する。第1測定光束および第2測定光束にそれぞれ起因する第1測定および第2測定を含んだ少なくとも1の測定セットを実行する。様々な位置での測定セットの実行のため、少なくとも第1表面領域を移動させる。各測定結果は、極めて良好な分解能(例えば、少なくとも10nmの分解能)で決定される。本センサ装置と動作方法は、干渉計または他の高額で複雑な構成要素を使わないで、高い分解能と精度を必要とする測定に適用できる。
(もっと読む)
共焦点顕微鏡装置
【課題】本発明では、正確に測定対象平面を検出すると共に、測定時間の短縮が可能な共焦点顕微鏡装置を提供することを目的とする。
【解決手段】観察試料8の観察面に光を集束する少なくとも1つの対物レンズ7と、観察試料8と対物レンズ7との距離を所定間隔で変化させるZレボルバ16と、観察試料8と対物レンズ7との距離に応じて所定間隔を設定する測定条件情報指示部19と、設定された所定間隔で上記距離を変化させるようにZレボルバ16を駆動制御するZ駆動制御部22と、観察面からの反射光を検出する光検出器12と、上記所定間隔の距離毎に観察面上に光を二次元走査して光検出器12で検出される検出信号により平面画像を生成し、生成された複数の平面画像を用いて三次元画像を生成するコントローラ2を有する共焦点顕微鏡装置100により、上記課題の解決を図る。
(もっと読む)
像面位置計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の像面位置を精度高く計測すること。
【解決手段】基板の露光量をラインパターンのレジスト像が解像する露光量以上になる大きさ、換言すれば、ラインパターンのレジスト像のコントラスト値が所定値以上になる大きさに制御する。また、フォーカス位置を変化させた際にパターン倒れが発生しない大きさ以上の線幅を有するラインパターンを使用してベストフォーカス位置を算出する。これにより、デフォーカスによってパターン倒れが発生することを抑制しつつ、算出されるベストフォーカス位置の露光量依存性を無視することができるので、投影光学系の像面位置を精度高く計測することができる。
(もっと読む)
撮像装置、撮影レンズおよび画像処理プログラム
【課題】特定の開口形状を有するマスクである構造化開口を撮影レンズに設けて撮影される撮影画像から距離情報を得るときに、高精度化を図るには開口位置を変えて2回以上の撮影を行うことが好ましい。しかし、同じ被写体に対して複数回の撮影を行う場合、画像間に生じる被写体の動き、撮影者の手振れなどに起因して、得られる距離情報が大きく劣化してしまう。
【解決手段】上記課題を解決するために、撮像装置は、光学系を介して入射する被写体光束を複数の波長帯に分離して検出する撮像素子と、光学系の光軸に交差して配設される構造化開口とを備え、構造化開口は、複数の波長帯のうちの一つである第1波長帯を透過または遮断する第1フィルタと、複数の波長帯のうちの一つであって第1波長帯とは異なる第2波長帯を透過または遮断する第2フィルタを、光学系の光軸に対してそれぞれ偏心した位置に設けられた第1開口および第2開口に有する。
(もっと読む)
1 - 20 / 80
[ Back to top ]