
Fターム[2F112BA11]の内容
Fターム[2F112BA11]に分類される特許
1 - 20 / 43
半導体装置の駆動方法
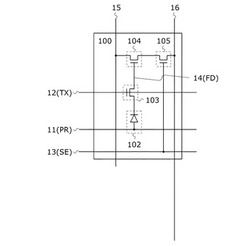
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
測距システム、画像処理装置、コンピュータプログラム及び測距方法

【課題】撮影部と表示部とを有する携帯端末で、それらの端末間の距離を計測する測距システムを提供する。
【解決手段】 測距システム(100)は、所定の時系列で所定の図形を表示する表示部(51B)を有する計測対象物(50B)と、所定の図形を撮影する撮影部(53A)と、撮影部(53A)により撮影された所定の図形と予め記憶された所定の図形の設計値とに基づいて、計測対象物から撮影部までの距離を計測する距離計測部(576)と、を備える。
(もっと読む)
測距装置と方法とプログラム並びに撮像装置と方法とプログラム
【課題】 AF処理が不要な状態が検知されたときに、測距装置の動作に用いる複数の電源のうち、特定の電源供給を停止して電力消費を低減する測距装置および同装置を備える撮像装置に関する。
【解決手段】 被写体からの入射光を結像する第1測距レンズおよび第2測距レンズで結像される被写体像に応じた第1測距信号を出力する第1測距素子と第2測距素子を備え、第1測距信号と第2測距信号とに基づいて被写体までの距離を特定する主制御装置と通知可能で、第1測距信号と第2測距信号とを主制御装置のインターフェース用に変換する画像変換部と、画像変換部に供給される電力を制御する電源制御部と、を有し、電源制御部は通常モードから省電力モードに移行するときに、画像変換部への電力供給を停止する、測距装置による。
(もっと読む)
測距装置
【課題】 本発明は、被写体までの距離を測定するAFセンサー等の測距装置付き撮像装置に係わり、小型化およびコスト削減を可能にする測距装置を提供する。
【解決手段】 本発明の測距装置であるAFセンサーユニットは、フレキシブル基板4に実装されたAFセンサー5と、被写体からの光を集光するAFセンサー5用のAFレンズ1と、AFセンサー5とAFレンズとの焦点距離を調整する為のピント調整用スペーサー3と、AFセンサー5とAFレンズ1とピント調整用スペーサー3を保持するAFホルダー2とで構成され、AFセンサーを実装したフレキシブル基板4にAFセンサー5の位置を調整するための把持部(切欠き部4a)を備えた。
(もっと読む)
車載カメラを用いた測距装置
【課題】単一の車載カメラによって取得される撮像画像を基に、車両の外部の移動体と自車両との間の距離を測定することできる測距装置を提供する。
【解決手段】車載カメラ2により異なる時刻で取得された第1撮像画像と第2撮像画像のうちの第1撮像画像において、移動体Mの路面に対する接地点Pに対応する画像上移動体接地点P1を特定し、車両との間の距離が移動体Mの接地点Pと同一の距離となる静止点Qに対応する第1撮像画像上の点Q1と第2撮像画像上点Q2とを第1撮像画像及び第2撮像画像から抽出する。抽出した点Q1,Q2を用いて、モーションステレオの手法によって、静止点Qと車両との間の距離と算出し、算出した距離を移動体Mと車両との間の距離として決定する。
(もっと読む)
光センサー
【課題】光学部品の点数を少なく、構造を簡単化して、光センサーの小型化及び低コスト化を実現する。
【解決手段】振動検出用光センサー1は、光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び1個の受光素子6を備える。波長板ユニットは1/4波長板7と振動板8とが一体化され、光センサーの小型化、構造及び組立の簡単化、低コストが図れる。受光素子6は、光軸x2を振動板の反射光の光軸x1と平行にかつ僅かにずらして配置される。それに対応して、受光素子に入射するビームスポット形状は、その中心cを受光面6aの中心Oから僅かにずらして離れた位置に置いて投影される。受光素子から検出される光量は、振動板の変位に対応して増減する。
(もっと読む)
光センサー
【課題】光学部品の点数を少なく、構造を簡単化して、光センサーの小型化及び低コスト化を実現する。
【解決手段】振動検出用光センサー1は、光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び光検出部として二次元イメージセンサー6,14を備える。波長板ユニットは1/4波長板7と振動板8とが一体化され、光センサーの小型化、構造及び組立の簡単化、低コストが図れる。二次元イメージセンサーの受光面6a,14aには、振動板の反射面8aの位置に対応して、同心で異なる半径の円形のビームスポット形状が入射する。二次元イメージセンサーの出力信号からビームスポット形状の面積又は半径を測定することによって、振動板の位置又は変位量を検出する。
(もっと読む)
測距装置、測距用モジュール及びこれを用いた撮像装置及び測距用モジュールの製作方法
【課題】 測距用レンズとガラス基板と半導体チップとを一体化して、小型化と低コスト化とを図ることのできる加工方法を用いた場合においても、高精度な遮光を実現することが可能な測距装置を提供する。
【解決手段】本発明の測距装置は、互いに光軸O1、O2に平行な一対の測距用レンズ11a、11bを有して各測距用レンズによりそれぞれ被写体像を撮像領域16a、16bに形成するレンズアレイ板11と、撮像領域が形成されたウエハ板14と、レンズアレイ板11とウエハ板14との間に介在されかつ各測距用レンズに入射する像形成光束を各測距用レンズに対応する各撮像領域に導く透明板12とを一体に有する。透明板12には、レンズアレイ板11に臨む面の側からウエハ板14に臨む面の側に向かって厚さ方向に延びる遮光用溝17aと、ウエハ板14に臨む面の側からレンズアレイ板11に臨む面の側に向かって厚さ方向に延びる遮光用溝17bとが形成されている。この両遮光用溝の少なくとも一方に遮光用樹脂18が充填されている。
(もっと読む)
距離測定装置及び距離測定方法
【課題】カメラの台数を増やさないように、2つの画像を比較して対応点を探索するための計算負荷が高くならないように、また基線長を延長する時にカメラの移動時間が長くならないようにすることによって、要求精度を満たす距離測定を短時間で効率的に行うことができる距離測定装置を低コストで提供すること。
【解決手段】本発明の距離測定装置は、物体を撮影する複数の撮像手段(10a,10b)と、
前記撮像手段のうち2つ以上の撮像手段からの画像により、物体までの距離を算出する距離計算手段(13)と、
前記撮像手段の位置を制御する位置制御手段(18)と、
前記距離計算手段により算出された距離によって、要求精度を達成するために必要な基線長を算出する基線長計算手段(15)と、
前記基線長計算手段が算出した基線長を記憶する基線長記憶手段(16)とを備えることである。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
撮像装置、距離測定装置、及び車外監視装置、並びに撮像方法
【課題】 複数の光画像を撮像する安価な撮像装置、好ましくは2組のステレオカメラを組み合わせた安価な距離測定用の撮像装置の提供。
【解決手段】 複数の撮像領域に分割された撮像面を有する撮像素子13と、異なった方向から前記撮像面に照射される光線による複数の画像情報、好ましくは近距離撮影用カメラのレンズ12から照射される画像情報及び遠距離撮影用カメラのレンズ11から照射される画像情報を、それぞれの画像情報に分離して、前記撮像面の別々の撮像領域に形成させる光フィルタ14と、を備えることを特徴とする撮像装置。
(もっと読む)
光受信装置及び光通信システム
【課題】簡易な装置構成で、伝送効率を低下させずに、距離を計測することができるようにする。
【解決手段】光受信装置の高速カメラによって、光送信装置のLEDアレイを撮像し、高速カメラによって撮像された画像を取得し(100)、取得した画像に基づいて、受信データを復調する(102)。復調された受信データが、同期用プリアンブルデータである場合には(104)、記憶された基準となる同期用プリアンブルデータを読み込み(108)、復調された同期用プリアングルデータと、読み込まれた基準となる同期用プリアンブルデータとを比較して、誤りデータ数を計測し、誤りビット率を算出する(110)。そして、距離決定テーブルを読み込み(112)、読み込んだ距離決定テーブルから、算出された誤りビット率に対応する距離を決定し、光送信装置のLEDアレイまでの距離を計測する(114)。
(もっと読む)
撮像装置
【課題】撮像装置において、簡易な構成で、好適に被写体までの距離を測定可能とする。
【解決手段】撮像装置は、複数のレンズ(100)と、複数のレンズの各々を介して、同一の被写体(500)を複数の像(550)として撮像する撮像素子(210)と、撮像素子により同時に若しくは並行して撮像される複数の像のうち二つの像に係る又は撮像素子により時間的に相前後して撮像される複数の像のうち一つの像に係る、二つの結像位置の相互間に、視差量を付与する視差量付与手段(310,320)と、二つの結像位置の相違に基づいて、撮像素子及び被写体間の距離を算出する距離算出手段とを備える。
(もっと読む)
距離測定装置および距離測定方法
【課題】精度よく距離情報を測定できる小型かつ低コストの距離測定装置を提供する。
【解決手段】本願発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、メモリ3に保存された画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成部4aと、輝度情報算出部4bと、距離情報算出部4cと、マスク部4dとからなる。マスク部4dは、画像センサカメラ1内部のマイクロレンズアレイ12の非レンズ部に対応する画素の値を所定の値に変換する。
(もっと読む)
距離測定装置および距離測定方法
【課題】奥行き分解能の高い距離測定装置あるいは距離測定方法を提供する。
【解決手段】本発明に係る距離測定装置は、画像センサカメラ1と、画像キャプチャボード2と、画像データを保存するメモリ3と、画像データから対象物までの距離情報を算出する画像処理部4と、画像処理部4で算出された距離情報を表示する表示モニタ5とを備える。画像処理部4は、再構成画像を生成する再構成部4aと、複数の再構成画像の各々を複数の領域に分割し、各領域について、領域に含まれる画素の輝度の大きさを代表する第1の代表値を算出し、第1の代表値に基づいて画素群内の輝度分布の偏りの大きさを表わす第2の代表値を算出する輝度情報算出部4bと、第2の代表値に基づいて対象物までの距離を算出する距離情報算出部4cとからなる。
(もっと読む)
距離計測装置及び距離計測方法
【課題】
非平行で完全平面ではない反射板に映る2重像を1台の撮像装置で撮影して得られた1枚の画像に基づいて安価な装置構成及び短い計測時間で高精度な距離計測を行い得るようにした距離計測装置を提供する。
【解決手段】
反射板に写る位置ずれのある2重像を撮像手段で撮影して得られた画像から、2重像間変位を算出する2重像間変位算出部と、既知の距離にある複数のキャリブレーション平面を2重像として撮影した複数の画像から、反射板の形状、姿勢、屈折率及び撮像手段のカメラ光学中心から反射板までの光軸に沿った距離を表す外部パラメータを推定するキャリブレーション処理部と、外部パラメータと計測対象を2重像として撮影した1枚の画像から計測対象までの距離を算出する距離算出部とを備え、反射板を局所的に非平行な平面で近似し、キャリブレーション処理部で推定された外部パラメータは、2重像を撮影した画像上の注目点に応じて異なる値を持つ。
(もっと読む)
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
【課題】距離画像の画像ファイルのデータ量を効率よく低減撮影者が所望とする量子化方式により距離値Xi,Yi,Ziを変換することができることとなる。できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
【課題】距離画像の画像ファイルのデータ量を効率よく低減できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
固体撮像装置及び距離画像測定装置
【課題】 簡易な構成で距離画像測定が可能な固体撮像装置及び距離画像測定装置を提供する。
【解決手段】 一対の第1ゲート電極IGR,IGLが、光感応領域SAと一対の第1蓄積領域AR,ALとの間のポテンシャルφTX1,φTX2が交互に傾斜するよう半導体基板100上に設けられている。一対の第2ゲート電極IGR,IGLは、第1蓄積領域AR,ALと第2蓄積領域FDR,FDLとの間にそれぞれ介在する第1ポテンシャル障壁φBGの高さを制御するよう半導体基板100上に設けられており、光検出素子によって検出される背景光の出力が高いほどキャリアに対する第1ポテンシャル障壁φBGの高さを増加させる。
(もっと読む)
裏面入射型測距センサ及び測距装置
【課題】 高精度の距離検出を行うことが可能な裏面入射型測距センサ及び測距装置を提供する。
【解決手段】 裏面入射型測距センサ1は、二次元状に配列した複数の画素P(m,n)からなる撮像領域1Bを有する半導体基板1Aを備えている。各画素P(m,n)からは、上述の距離情報を有する信号d’(m,n)として2つの電荷量(Q1,Q2)が出力される。各画素P(m,n)は微小測距センサとして対象物Hまでの距離に応じた信号d’(m,n)を出力するので、対象物Hからの反射光を、撮像領域1Bに結像すれば、対象物H上の各点までの距離情報の集合体としての対象物の距離画像を得ることができる。投光用の近赤外光の入射に応答して半導体深部で発生したキャリアを、光入射面とは逆側のキャリア発生位置近傍に設けられたポテンシャル井戸に引き込めば、高速で正確な測距が可能となる。
(もっと読む)
1 - 20 / 43
[ Back to top ]