
Fターム[2F112DA28]の内容
Fターム[2F112DA28]に分類される特許
461 - 471 / 471
光学式測距センサおよび自走式掃除機

【課題】 騒音が無く、長期安定性が比較的良好で、小型化とコスト削減ができ、しかも、測定精度が比較的高い光学式測距センサを提供すること。
【解決手段】 複数のLED51〜55からの出射光を、1つの発光レンズ1で透過して、被検出物32で反射された反射光を、受光レンズ2を介してPSD4で受光する。LED51〜55からの光出射方向によって被検出物32の方向を検出すると共に、PSD4の受光面における反射光の受光位置に基づいて、被検出物32に対する距離を検出する。焦電型センサ30で遠赤外線L10を受光することにより、被検出物32が人体であるか否かを検知する。1つの受光レンズ1によって複数のLED51〜55の出射光を透過するので、光学式測距センサの小型化とコスト削減を行うことができる。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 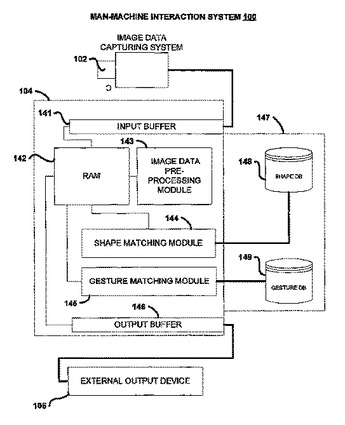 (もっと読む)
(もっと読む)
深度情報を含む画像の生成方法と装置
深度情報を含む画像を生成する方法と装置が提供される。この方法では、場面から発する放射を検出し、異なる面における場面の少なくとも2つの画像を形成する。各画像は強度データ値のセットを有する。データ値の変動が得られ、強度分散の2つのセットがデータ値から得られ、強度分散データは深度情報を得るために処理される。深度情報は、画像データにおける異なる深度情報を識別するためにコード化される。
 (もっと読む)
(もっと読む)
オブジェクト検出方法、オブジェクト検出装置、およびオブジェクト検出プログラム
本発明の利点は、オブジェクトを適切に検出することである。本発明におけるオブジェクト検出装置は、オブジェクトまでの距離を決定する複数のカメラと、距離を決定する距離決定部と、ピクセルの距離に対するピクセル度数を特定するヒストグラム生成部と、最もありそうな距離を決定するオブジェクト距離決定部と、距離の差に基づくピクセルの確率を提供する確率マッピング部と、ピクセルのグループとしてカーネル領域を決定するカーネル検出部と、カーネル領域の近傍にあるピクセルから選択したピクセルのグループとして縁領域を決定する縁検出部と、オブジェクトが所定の確率で現れるオブジェクト領域を特定するオブジェクト特定部と、を有する。  (もっと読む)
(もっと読む)
単一チップの赤、緑、青、距離(RGB−Z)センサー
RGB−Zセンサーは単一のICチップ上に実施可能である。ホットミラーなどのビームスプリッタが、対象物から入射する第一及び第二のスペクトルバンド光エネルギーを受信し、好ましくはRGBであるイメージ成分及び好ましくはNIRZである成分に分離する。RGBイメージとZ成分は、それぞれイメージデータとZデータを出力するRGBピクセル検出器及びNIRピクセル検出器のアレイ領域によってそれぞれ検出される。これらの領域のピクセルサイズ及びアレイ解像度は同一である必要はなく、またこれら両方のアレイ領域を共通のICチップ上に形成しても良い。対象物の認識を容易にするために、イメージデータを用いたディスプレイはZデータによって補助できる。その結果得られる構成は、ビームスプリットを行なうことによる光学的効率性と単一のICチップに実施することによる簡素性とを組み合わせたものとなる。この単一チップの赤、緑、青、距離(RGB−Z)センサーの使用方法も開示されている。  (もっと読む)
(もっと読む)
物体までの距離の測定
本発明は、第1カメラ(1)が可視スペクトル域に感応し、第2カメラ(2)が赤外線スペクトル域に感応する2つのカメラ(1;2)を有する装置に関する。カメラ(1;2)は、少なくとも1つの物体(4)を含む同一の場面(3)の像を撮像するために相互に所定の間隔(a)をおいて配置される。装置は、さらに、所定の間隔(a)と2つのカメラ(1;2)によって撮像される像とに基づいてカメラ(1;2)からの物体(4)の距離を計算する三角測量装置(7)を備えている。  (もっと読む)
(もっと読む)
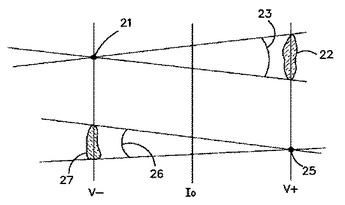
3次元距離測定用の光電子センサおよびデバイス
本発明は変調された光子束(50)を復調する光電子センサ、および少なくとも1つのそのような光電子センサを備えた特に3次元距離測定用の測定デバイスに関する。本発明の光電子センサは、半導体領域(10)内に組み込まれ、例えば、半導体領域内で拡散され、半導体領域(10)と逆にドープされた少なくとも2つの収集領域(20、22)を備える。前記収集領域(20、22)を用いて変調された光子電流(50)の進入によって生じる少数担体が収集かつタップされる。さらに少なくとも2つの制御領域(32、34)が半導体領域(10)内に組み込まれ、前記制御領域は制御領域(32、34)に印加することのできる制御電圧に従ってドリフト領域を生成する。前記制御領域(32、34)は半導体領域(10)と同様にドープされている。
 (もっと読む)
(もっと読む)
位置検出デバイス
n個のセグメントと、光検出要素アレイのセグメントからの出力値(OV)を比較することによって、最大強度を有するセグメントを識別するように構成されるパラレル算術処理部とを有する光検出要素アレイを備える位置検出デバイス。パラレル算術処理部は、最大強度を有するセグメントが選択されるまでセグメントを順に選択/除外するように構成される少なくとも1つの比較段を備え、第1段は、入力セグメント(IS)としてそれぞれの光検出要素セグメントから出力値OVを受け取り、追加段は、入力セグメントISとして先行する段から出力値OVを受け取る。その位置検出デバイスを備えるレンジファインダもまた提供される。 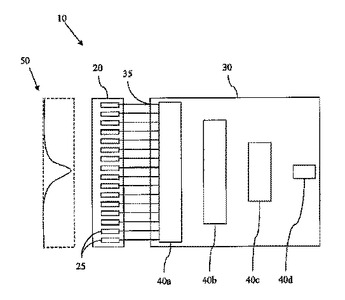 (もっと読む)
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
本発明の様々な実施形態では、オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。同様に、オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。有利なことに、その個々の画素が分光組成を特定することができるセンサを使用して、さらに、TOF情報を特定することもできる。  (もっと読む)
(もっと読む)
距離情報入力装置

【課題】本発明は、クロストークの低減された高精度な距離情報を取得可能にする距離情報入力装置を提供する。
【解決手段】本発明の一態様によると、輝度変調光源によって輝度変調された光が照射された前記対象物からの反射光を受光し、光電変換を行うと共に、前記輝度変調光源と同期して感度変調可能な受光素子を備えた距離情報入力装置において、前記受光素子は、光電変換部と、二つの電荷蓄積部と、二つの電荷振り分けゲートと、二つの電荷検出部と、二つの電荷転送部とを有し、前記受光素子のリセット動作と前記電荷蓄積部に蓄積された電荷を読み出す読み出し動作との間に、前記電荷振り分けゲートをオフして前記電荷蓄積部のポテンシャルを上げることによって飽和電荷量以上の余剰電子を排出する動作を少なくとも一回行なうことを特徴とする距離情報入力装置が提供される。
(もっと読む)
車外監視装置
【課題】レーザレーダによる測距値と画像による測距値との最適な統合を複雑な演算等することなく素早く行い前方の立体物データとして素早く出力する。
【解決手段】距離データ統合部5cはレーザ距離データと画像距離データの統合を次のように行う。レーザ距離データが有効な場合、レーザ距離データが遠方の場合は最終的な距離データはレーザ距離データとし、レーザ距離データが中間距離の場合、画像距離データが有効で且つ画像距離データとレーザ距離データとの差が所定値以内の場合は最終的な距離データはレーザ距離データと画像距離データとの平均値とし、上述以外の場合はレーザ距離データとする。レーザ距離データが近距離の場合は最終的な距離データは画像距離データとし、レーザ距離データが極近距離の場合は最終的な距離データはレーザ距離データとする。またレーザ距離データが無効な場合は最終的な距離データは画像距離データとする。
(もっと読む)
461 - 471 / 471
[ Back to top ]