
Fターム[2H051BB16]の内容
自動焦点調節 (17,376) | 非TTL測距方法 (370) | アクティブ型基線長三角測距 (121) | 走査を行うもの (16) | 光源によるもの (9)
Fターム[2H051BB16]の下位に属するFターム
多数の光源を用いるもの (2)
Fターム[2H051BB16]に分類される特許
1 - 7 / 7
光学的情報読取装置
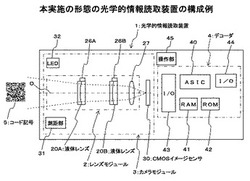
【課題】簡単な構成で液体レンズによるフォーカス機能とズーム機能を備えた光学的情報読取装置を提供する。
【解決手段】光学的情報読取装置1は、電圧の印加で境界面の形状が変化する液体レンズ20A,20Bが、境界面の形状を変化させることで焦点距離が変化し得る所定の間隔を開けて配置されると共に、少なくとも1個の光学レンズ27が配置されたレンズモジュール2と、レンズモジュール2を透過した光信号を光電変換するイメージセンサ30と、各液体レンズ20A,20Bの温度を検知するサーミスタ26A,26Bと、コード記号5までの距離を測定する測距部31と、測距部31で測定された距離情報と、サーミスタ26A,26Bで検知された温度情報に基づき、フォーカス制御及びズーム制御を行うASIC40を備える。
(もっと読む)
被写体追尾装置および撮像装置

【課題】暗所下でも追尾対象の被写体を指定して被写体追尾を可能にする。
【解決手段】被写界に赤外光を照射し被写界からの反射光を受光して被写界の複数の測定点までの距離情報を繰り返し測定する測定手段2と、距離情報に基づいて被写界に存在する被写体の特徴を生成する生成手段5と、被写体の特徴を表示画面に表示する表示手段11と、被写体の特徴が表示された表示画面の中から追尾対象の被写体を選択する選択手段10と、追尾対象の被写体の特徴を記憶する記憶手段4と、繰り返し測定される距離情報に基づき生成される被写体の特徴を、記憶手段に記憶されている追尾対象の被写体の特徴と照合しながら、追尾対象の被写体を追尾する追尾手段5とを備える。
(もっと読む)
撮像装置
【課題】
簡易な構成でハイブリット方式のAF機能により合焦動作を高速、かつ高精度に行うことができる焦点調節機能を有する撮像装置を得ること。
【解決手段】
フォーカスレンズユニットを含む撮影光学系と、該撮影光学系により形成された被写体像を光電変換する撮像素子と、
該撮像素子からの出力信号の周波成分に基づいて該撮影光学系の焦点状態を表すフォーカス評価値信号と、該撮像素子からの出力信号に基づいて被写体の輝度信号を出力する第1の検出手段と、
該フォーカス評価値信号とは異なる該被写体に関する測距信号を出力する第2の検出手段と、
該輝度信号とは異なる被写体の第A明るさの信号を出力する第3の検出手段と、
各検出手段からの信号に基づいて該フォーカスレンズユニットを駆動制御するカメラマイコンとを有し、
該カメラマイコンは、各検出手段からの検出信号に基づいてフォーカスレンズユニットを駆動制御すること。
(もっと読む)
三次元形状測定方法、装置、及びフォーカス調整方法
【課題】測定奥行の位置調整を迅速且つ的確に行うことができるようにする。
【解決手段】スリット光を測定対象物10Dに投光すると共にその反射光を受光し、測定対象物10Dについての二次元画像を取得する動作を、フォーカス距離を変えて所定回数繰り返す。フォーカス距離を変えて取得された二次元画像の各々について、複数のエリアA〜Gで像面コントラストを算出する。像面コントラストが所定の閾値を超過する高コントラスト領域を、各フォーカス距離で取得された二次元画像毎に抽出する。この高コントラスト領域について三角測量を行い、各エリアの距離情報を取得する。この距離情報に基づき、各エリアが所定の測定奥行aを有する測定範囲20Eに含まれるよう、測定範囲20Eの合わせ込み調整を行う。
(もっと読む)
デジタルカメラ用自動合焦装置
【課題】被写体が暗く遠方にある場合でもオートフォーカスの可能なデジタルカメラ用の自動合焦装置を提供する。
【解決手段】距離センサ6は、被写体に光スポットを投光する発光素子8を備えた投光部と、被写体から反射した光スポットを受光しその受光位置に応じて測距データを出力する受光素子9を備えた受光部とを含む。受光素子9は、光スポットを受光するために二分割された一対の受光面を有する二分割SPD素子からなる。一対の受光面を互いに隔てる分割線が、近距離側に対応する位置から離れて遠距離側に対応する位置に配されている。制御部7は、SPD素子から出力された測距データに基づいてモータ1を制御し、レンズ4を合焦位置にセットする。
(もっと読む)
光学的情報読取装置
【目的】読取範囲の非常に大きな光学的情報読取装置を提供すること。小形、軽量、且低コストの合焦装置及び測距装置を実現すること。小形、軽量、且低コストの光学的情報読取装置を提供すること
【構成】この発明の光学的情報読取装置は、光源2と、合焦装置3と、振動ミラー形走査装置4と、受光光学系5と、光電変換器7と、信号処理部8と、測距装置6とで構成し、合焦装置3は、台焦レンズ31と、合焦レンズ位置検出手段32と、合焦レンズ移動手段33と、合焦レンズ位置サーボ回路34とで構成する。合焦レンズ位置サーボ回路34は、合焦レンズ位置検出手段32からの位置検出信号と測距装置6からの距離測定信号とが一致した時に、合焦レンズ移動手段33を停止させるものである。
(もっと読む)
キャプチャ装置の設定を深度情報によって最適化する方法及び装置
画像キャプチャ装置の画像キャプチャ設定を調整する方法が提供される。この方法は、最初にシーンを特定する。次に、シーンの画像がキャプチャされる。この方法では、シーンの画像を定義しているデータからシーンの深度マスクを生成する。次に、キャプチャされた画像の前景領域及び背景領域の一方又は両方内の物体に対応するピクセル値が、深度マスクのビット値に基づいて調整される。画像キャプチャ装置及びシステムが提供される。  (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]