
Fターム[2H105AA13]の内容
カメラの付属品 (5,167) | カメラの支持、保持、固定 (2,551) | カメラを取り付けるためのもの (1,938) | カメラの取り付け、固定、保持 (1,490) | 動力の使用 (381) | 連続的に対象を追尾するもの (26)
Fターム[2H105AA13]に分類される特許
1 - 20 / 26
自動追尾カメラシステム
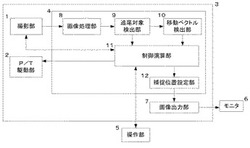
【課題】 追尾被写体の位置が追尾の所定位置と異なっていても大きな映像変化をさせないで所定の位置に追尾制御することを可能にした自動追尾カメラシステムを提供する。
【解決手段】 自動追尾カメラシステムは、レンズ装置と撮像装置を含む撮影部をパン・チルト回動させる回動手段と、撮影映像から追尾対象を検出する追尾対象検出手段と、追尾対象の移動ベクトルを検出する移動ベクトル検出手段と、撮影映像内での追尾対象の捕捉位置を設定する捕捉位置設定手段と、回動手段の駆動を制御する制御手段を有し、制御手段は、追尾対象検出手段によって撮影映像内に追尾対象を検出した後、移動ベクトル検出手段によって検出された移動ベクトルに基づき、捕捉位置に追尾対象を捕捉するよう回動手段を制御する捕捉モードと、捕捉モードの後、追尾対象を捕捉位置に捕捉し続けるように回動手段を制御する維持モードと、を有する。
(もっと読む)
カメラスタビライザ

【課題】ズーム操作時に一定の駆動速度を維持する際の操作を容易とする。
【解決手段】カメラを回転させるジンバル機構12と、カメラのズーム状態を検出し、ズーム検出値を出力するズーム検出手段21と、ズーム指示値変換手段22と、入力操作手段14と、入力操作手段14より入力される入力値に、ズーム指示値に反比例する利得を掛算して駆動速度を求め、その駆動速度によってジンバル機構12を駆動制御する駆動制御手段23とを備える。ズーム指示値変換手段22は、一定ズームイン操作時に最小値から最大値に向って変化するズーム検出値の最小値・最大値間を線形補間して得たズーム指示値を、各時間におけるズーム検出値と対応付けた変換テーブルを有し、その変換テーブルを参照してズーム検出値をズーム指示値に変換する。
(もっと読む)
回転台付きカメラ装置
【課題】 操作者が意図した物体を追尾でき、かつ、追尾操作の困難さを低減でき、特に操作開始直後の操作の難しさを低減できる回転台付きカメラ装置を提供する。
【解決手段】 カメラ装置1は、撮像部11と、回転台17と、画像から物体を検出する物体検出部31と、回転台17の回動のための手動操作量を入力する手動操作入力部45と、物体検出結果及び手動操作量の情報に基づいて回転台17を制御する回転台制御部47とを備える。回転台制御部47は、物体位置に応じた回転台の回動速度である物体位置速度を求め、手動操作量に応じた回転台の回動速度である手動操作速度を求め、物体位置速度及び手動操作速度を重み付け加算により統合して統合速度を求め、そして、統合速度にて回動するように回転台17を制御する。
(もっと読む)
連動撮影システム
【課題】 主カメラに連動して同一被写体を撮影するだけでは番組効果を高めるに不十分である。本発明は主カメラに連動して主カメラと異なる目線の映像を自動的に撮影することを可能にした連動撮影システムを提供する。
【解決手段】 主カメラは主たる被写体の位置情報、色情報、大きさ情報を算出して出力する手段を備え、複数の従カメラ雲台は、主カメラからの主たる被写体の位置情報、主カメラとの相対位置情報及び従カメラ雲台の撮影している映像内容から、主カメラが撮影する主たる被写体とは異なる被写体であることを条件として被写体を決定する手段を備え、決定された被写体が撮影画像の中央付近となるよう制御されることを特徴としている。
(もっと読む)
可動機構部制御装置、可動機構部制御方法、プログラム
【課題】カメラと雲台から成る撮像システムにより、できるだけ効率の良い探索動作が得られるようにする。
【解決手段】固定のチルト位置で、パン方向において予め定められた角度範囲内を移動するという探索動作を、撮像方向が上向きの状態から下向きとなる順で、異なるチルト角ごとに行っていく。これにより、撮像方向が上側に向く位置に被写体が在る可能性が高いことを前提として、早期に被写体が撮像視野角範囲に収まって検出される可能性を高くする。
(もっと読む)
可動機構部制御装置、可動機構部制御方法、プログラム
【課題】カメラと雲台から成る撮像システムにより、できるだけ効率の良い探索動作が得られるようにする。
【解決手段】有効可動角度範囲として設定された探索範囲を探索するのにあたって、有効可動角度範囲よりも狭い角度値の部分可動角度範囲ごとに所定の動きパターンによる探索を順次行っていく。これにより、有効可動角度範囲の全体にわたって同じ動きパターンにより探索しようとする場合と比較して、より的確に探索していくことが可能になる。
(もっと読む)
AF枠自動追尾システム
【課題】オートフォーカス(AF)によるピント合わせの対象範囲であるAF枠を所望の被写体に自動追尾させるAF枠自動追尾を停止させるための操作を、そのために設けられたスイッチ等の操作を行うことなく、マニュアルフォーカス操作、又は、画角変更操作によって行えるようにすることにより、撮影時におけるカメラマンの一連の作業内での操作でAF枠自動追尾を停止させることができ、カメラマンの負担を軽減することができるAF枠自動追尾システムを提供する。
【解決手段】AF枠自動追尾を実行している際に、カメラマンがフォーカスデマンド26のフォーカスノブ30を回動操作すると、AF枠自動追尾が停止すると共に、AFが停止し、フォーカスノブ30の操作に基づくフォーカス制御が実行される。
(もっと読む)
撮像システム、画像提示方法、プログラム
【課題】デジタルスチルカメラと雲台から成る撮像システムについて、ユーザにとっての利用性がより高いものを提供する。
【解決手段】自動撮影動作を実行した後において、自動撮影動作により得られたショット画像データの画像を表示画面部に表示させる際、被写体としての人物に対して、表示画面部の表示方向が向けられるようにパン・チルト方向への移動が行われるように、パン・チルト駆動制御を実行する。
(もっと読む)
カメラ駆動装置及びこれを用いた撮像装置
【課題】小型化、静粛性、機械的機構の簡素化等の向上させる。
【解決手段】本発明に係るカメラ駆動装置は、揺動可能に軸支された可動体55,56に、カメラモジュール30が固定されるカメラ駆動装置であって、前記可動体55,56を電磁的に揺動させることにより、前記カメラモジュール30の撮像範囲を変更可能にする。前記可動体55,56は、少なくとも一対の着磁部61,62,63,64を有し、前記着磁部61,62,63,64に対応する位置に、少なくとも一対の電磁石ユニット51,52,53,54が配置されている、
(もっと読む)
移動物体追尾制御装置
【課題】少ない計算量で、且つ高い精度で移動物体を追尾するように撮影装置を制御する。
【解決手段】時系列に入力された画像フレームから動きを検出する動き検出部44と、検出された動きの重心位置を移動物体の重心位置として算出する重心算出部452と、算出された移動物体の重心位置が、画像フレームの各方向のフレーム端から所定距離内の領域である回転反応領域内にあるか否かを判定する重心位置解析部455と、移動物体の移動速度を算出する移動速度算出部456と、移動物体が回転反応領域外である画像フレームの中心付近領域を経由して移動先方向の回転反応領域内に入ったときに、移動物体の重心位置と画像フレームの中心位置との距離に移動物体の移動速度から算出された移動物体の移動量を加算することにより撮影方向を移動させるための制御信号を生成して監視カメラ1に送信するモータ制御部457とを備える。
(もっと読む)
架空線撮影システム及び方法
【課題】
架空線を適正なサイズと方向で撮影する。
【解決手段】
レーザ測距装置28、選択装置34及び代表線距離・方向算出装置36により、ビデオカメラ10から見た代表架空線までの距離と方向を算出する。カメラ・架台制御装置38は、装置36の出力に従いカメラ10のフォーカスと撮影方向を制御する。線抽出装置46はカメラ10の撮影画像から線画像を抽出し、傾き算出装置48は線画像の傾きを算出する。制御目標決定装置50は、抽出された線の情報からカメラ10の光学ズームの制御目標及び撮影中心の制御目標を決定する。追尾モードで、装置38は、光学ズーム機能の制御目標に従いカメラ10の光学ズームを制御させ、傾き算出装置48の算出結果に従い、架空線が撮影画面内で水平になるようにカメラ10を回転させ、撮影中心の制御目標に従いビデオカメラ10をチルトし、装置36の出力に従いカメラ10をパンする。
(もっと読む)
追尾装置
【課題】機体側からの振動外乱による追尾性能の劣化を防ぐ追尾装置を提供する。
【解決手段】アジマス軸10を中心に回転する第1の粗動機構11と、前記第1の粗動機構に支持され、アジマス軸10と異なる方向のエレベーション軸20を中心に回転する第2の粗動機構21と、第2の粗動機構21に支持され、第1の回転軸40を中心に回転する第1の微動機構41と、第2の粗動機構21に支持され、第1の回転軸40と異なる方向の第2の回転軸50を中心に回転する第2の微動機構51と、第1および第2の微動機構41、51に支持され、目標物の位置データを出力する目標位置認識手段30と、を備え、第1および第2の微動機構41、51が回転駆動されることにより、第1および第2の粗動機構11、21の回転駆動での追尾誤差を抑圧する。
(もっと読む)
クレードル装置およびカメラシステム
【課題】 壁に掛けて、カメラを固定し撮影を行うことが可能なクレードルを実現する。
【解決手段】 カメラ本体を装着可能なクレードル装置において、前記クレードルは壁に取り付けることが可能であって、前記クレードル装置を壁に取り付けられた状態でカメラ本体が装着された際、装着されたカメラ本体の撮影光軸が水平方向に対して斜め下方向に向くように駆動する駆動手段を有する。
(もっと読む)
電動雲台クレードル
【課題】複雑な制御部(回路)を必要とせず、簡単な構成で人物検出から自動追尾までを可能とする電動雲台クレードルを提供する。
【解決手段】電動雲台クレードルは、撮影装置1を装着する上筐体3に設けられるセンサ13、14と、センサ13、14の前面に配置される無指向性レンズ15、16及び指向性レンズ17、18とを備える。また、無指向性レンズ15、16及び指向性レンズ17、18を切り替えるレンズ切り替え手段21を備える。
(もっと読む)
カメラ制御システム
【課題】電動により多軸方向に移動及び回転するビデオカメラのためのカメラ制御インターフェースを提供する。
【解決手段】制御システムは、カメラの視野を再現するモニタ26と、多軸方向における移動及び回転の指令を入力するための、手動操作可能なコントローラ21と、コントローラ21に入力された指令をカメラに送るプロセッサ22とを含む。プロセッサ22は、その軸においてカメラの動きが要求される可能性のある複数の異なる軸セットを提供し、さらに、コントローラの指令に応じてカメラが動くように、軸のセットまたは1つ以上の軸セットからの軸を選択する手段が設けられる。
(もっと読む)
パン又はチルトにおいて移動するカメラレンズを作動するための単一モーターによる回転式カメラ
【課題】時間遅延によって監視範囲の隅々まで監視されないことが起こらないようにすること。
【解決手段】撮影ヘッド及び撮影ヘッドに対して斜位に配置された斜めの駆動軸を備えるレンズユニットと、内側に撮影ヘッドを枢動可能に取り付けるための軸受支えと、モーターと、及び斜めの駆動軸を駆動させて回転運動を発生する駆動ギアセットとを具備する。
(もっと読む)
自動追尾カメラ装置
【課題】連続的で滑らかな駆動を実現して、かつ画像内における目標位置からの追尾対象の位置ズレ及びぶれが小さい画像を得る。
【解決手段】第一コントローラ52は、カメラ装置51のカメラ本体1により取得された画像とエンコーダ54で検出されたカメラ本体1の位置とに基づいて位置姿勢指令値を生成する。エンコーダ54の検出信号は、速度変換器55によって速度信号に変換されて第二コントローラ53に供給され、第二コントローラ53は、次々回の画像取得開始タイミングにおける追尾対象物の速度を予測する。第二コントローラ53は、今回の位置姿勢指令値が生成された後の次々回の画像取得開始タイミングに、カメラ本体1が、目標位置に到達し、且つ、次々回の画像取得開始タイミングにおけるカメラ本体1の速度が、上記予測された追尾対象物の速度と一致するようにカメラ装置51を制御する。
(もっと読む)
旋回ステージ装置及び監視カメラ装置
【課題】望遠レンズ等の部材が固定される旋回ステージの角振動や停止位置での微小移動を抑制して、旋回ステージの繰り返し停止位置の分解精度を向上させることができる旋回ステージ装置を提供する。
【解決手段】この旋回ステージ装置201は、望遠レンズ等の部材を固定するための旋回ステージ103を備える。旋回ステージ103の連結部103aには、ボールねじ104のナット117が球面受け部106を介して連結されている。ナット117は超音波モータ101によりボールねじ104のねじ軸104aを回転駆動することで軸方向に直線移動し、このナット117の軸方向の直線移動を旋回ステージ103のパン方向の旋回動作に変換する。
(もっと読む)
複数のカメラの連動トラッキングシステム
【課題】競馬、競艇等のレースを撮像する複数のカメラの制御をし、1台のメインカメラのトラッキングに合わせて他のサブカメラをメインカメラと同じ対象に合わせるように自動的にトラッキング制御し、サブカメラがメインカメラと同じターゲットを撮像するシステムを提供することを目的とする。
【解決手段】この発明のカメラ雲台制御システムは、競馬、メインカメラの雲台の操作に連動して、メインカメラの雲台情報に基づき同じターゲットを撮像するように合わせて上記複数のサブカメラの雲台を自動的に制御し、メインカメラ1台のコントローラで操作することにより前記複数のカメラがメインカメラの撮像点と同一撮像点で撮影できる。さらに、前記複数のカメラが予め定められた軌道上の同一撮像点で撮影できることを特徴とする。
(もっと読む)
カメラ姿勢制御装置及び移動型カメラ装置
【課題】カメラの位置を高くして傾斜面を走行する場合であっても、雲台取り付け面を水平に保持するとともに、転倒を防止することが可能なカメラ姿勢制御装置を提供する。
【解決手段】カメラ姿勢制御装置1は、カメラ3aを支持する支柱42と、この支柱42の下端を、当該支柱42の所定位置を支点として、車両装置2の移動方向に対して前後方向及び左右方向に沿って移動させる支柱駆動部43と、車両装置2の傾斜角を検出する傾斜角検出部44と、この傾斜角検出部44で検出された傾斜角に基づいて、支柱42を鉛直に保持するように支柱駆動部43の駆動制御を行う支柱駆動制御部49Aと、を備えることを特徴とする。
(もっと読む)
1 - 20 / 26
[ Back to top ]