
Fターム[3B057DA08]の内容
Fターム[3B057DA08]に分類される特許
1 - 20 / 87
電気掃除機
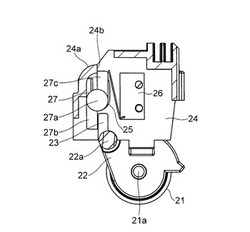
【課題】吸込口体の部品点数を削減して構造を簡素化できる電気掃除機を提供する。
【解決手段】吸込口体5の筐体16底面に開口する吸込口15に配した回転ブラシ19を駆動するスイッチ26と、筐体16に回動自在に支持される支持部材22の一端に配して支持部材22の回動により上下動する突出部21と、支持部材22の他端に配される第1係合部材23と、自重により上下動するとともに回動自在に支持されるレバー状の第2係合部材27とを有し、吸込口15を下方に向けた際に、突出部21の上昇により回動する第1係合部材23との係合により第2係合部材27が回動してスイッチ26を押圧し、吸込口15を上方に向けた際に、突出部21の上下動によって回動する第1係合部23に係合する位置から第2係合部材27が自重により退避する。
(もっと読む)
掃除システムおよびその制御方法

【課題】全体の構成を小型化することができる掃除システムを得る。
【解決手段】掃除機本体11と、掃除対象領域を示す地図情報が入力される地図情報入力装置13と、掃除機本体11の位置情報を取得する位置情報取得装置14と、地図情報入力装置13に入力される地図情報および位置情報取得装置14が取得する掃除機本体11の位置情報に基づいて、掃除対象領域の中で掃除機本体11が通過した領域を示す領域情報を作成する領域情報作成装置15と、領域情報作成装置15が作成した領域情報を表示する表示装置22とを備えている。
(もっと読む)
電気掃除機
【課題】電動送風機を確実に過熱保護しつつ、過熱保護された後の復帰までの時間を短縮した電気掃除機を提供する。
【解決手段】電気掃除機は、掃除機本体を有する。電気掃除機は、電動機53および電動機53により回転して電動機53を冷却する第1風路W1と電動機53を冷却しない第2風路W2とに排気する遠心ファン54を備え掃除機本体に収容された電動送風機36を有する。電気掃除機は、電動送風機36よりも熱容量が小さく、電動送風機36に流れる電流により発熱するシャント抵抗器46を第2風路W2に有する。電気掃除機は、シャント抵抗器46の温度が予め設定した温度閾値を超えると電動送風機36の吸込力を低下させるサーモスタット42を有する。
(もっと読む)
自律型清掃ロボット
【課題】 アフタサービスを容易に行うことが可能なカバレッジロボットを提供することを目的とする。
【解決手段】シャーシと、複数の駆動車輪アセンブリと、清掃アセンブリと、作業面から除去されたデブリを収集する清掃ビンと、を含み、清掃ビンが、清掃アセンブリにより収集されたデブリを収納するデブリ空洞、および真空ファンにより収集されたデブリを収納するフィルタ空洞を画定するビンハウジングと、該フィルタ空洞内に配置され、実質的に該真空ファンに微粒子が入るのを阻止するように構成されたビンフィルタと、該ビンハウジングに取り付けられ、ビン閉位置と、アフタサービス用に該フィルタ空洞および該ビンフィルタを剥き出しにするビン開位置との間で移動するように構成されたビンカバーとを備えることを特徴とする、カバレッジロボットが提供される。
(もっと読む)
電気掃除機
【課題】掃除中の動作に伴わない振動の検出を抑制することにより、掃除動作の継続中と中断中を適切に判別して電動送風機を制御する電気掃除機を提供する。
【解決手段】 電動送風機9を内蔵した電気掃除機本体5と、電気掃除機本体5に一端が取り付けられたホース4と、ホース4の他端に取り付けられた手元ホース3と、手元ホース3に取り付けられホース4に連通する延長パイプ2と、延長パイプ2に取り付けられた吸込具1とを有する電気掃除機において、手元ホース4に設けられ手元ホース4における振動を検出する掃除状態検出センサ部31と、掃除状態検出センサ部31の出力に基づいて電動送風機9を制御する制御手段29とを備え、掃除状態検出センサ部31は、手元ホース4の筐体に対し弾性体56を介して支持されるとともに、弾性体56の弾性定数が手元ホース3の筐体の弾性定数よりも小さいものである。
(もっと読む)
家庭用ロボット式掃除機
【課題】空気流から塵埃が分離された際に目詰りを生じず、吸引能力が経時的に低下せず、簡単に使用でき効率が良く、製造コストが高くない家庭用ロボット式掃除機を提供する。
【解決手段】シャシ12と、シャシに取付けられた支持車輪14と、支持車輪を駆動する駆動手段15と、掃除面上で掃除機を、人手を介することなくガイドするために駆動手段を制御する制御機構と、塵埃空気吸入口24を備えた掃除機ヘッド22と、塵埃空気吸入口から掃除機内部に空気を引き込むモーター・ファンユニットと、駆動手段、制御機構、及びモーター・ファンユニットに作用的に接続されたバッテリパック46とを備えるとともに、シャシに支持され掃除機ヘッドと連通し塵埃空気吸入口を通じて掃除機に吸入された空気から塵埃を分離するための分離装置52を備えてなり、分離装置は、使用時に塵埃が集められる着脱可能な箱体又は収集チャンバ62内に位置した少なくとも1つのサイクロン54,56を含む。
(もっと読む)
自走式装置並びにこのような装置の操作方法
【課題】自走式装置の操作方法を特に操作技術的に更に改良する。
【解決手段】自走式装置1特に吸込/掃除ロボットのような床2を清掃するための掃除機の操作方法であって、この場合、該装置は例えば周囲の間隔測定により少なくとも自動的に全領域Gのマッピング(マップの作成)を行う、自走式装置の操作方法。特にこのような方法の技術的操作の使用上有利な変更態様のために、装置が、その後に、全領域の部分領域(T1−T8)への自動細分割を行うことが提案される。さらに、自走式装置特に吸込/掃除ロボットのような床を清掃するための掃除機の操作方法であって、この場合、該装置は例えば周囲の間隔測定により少なくとも自動的に全領域のマッピングを行う、自走式装置の操作方法。設定された課題を解決するために、全領域のマッピング中に同時に、部分領域(T1−T8)への自動細分割が行われるように設計されている。
(もっと読む)
電気掃除機
【課題】本発明は、吸口体が被清掃面に接地しているか接地していないかに関わらず、電気掃除機の無駄なエネルギーの消費を抑制することを目的とする。
【解決手段】本発明は、吸口体2の回転ブラシ用電動機24の負荷電流の振幅Hの変化幅DがT0時間(例えば、3秒)変化しきい値より小さい場合に、電動送風機および回転ブラシ用電動機24を停止する。
(もっと読む)
電気掃除機
【課題】本体の挙動を操作体の挙動に適切に追従させることができ、操作性を高めることができる電気掃除機を提供する。
【解決手段】一方が操作体2に設けられると共に他方が本体4に設けられ操作体2と本体4との間で空中伝播経路を形成する送信器41及び受信器42a,42bと、送信器41から受信器42a,42bへの超音波の送受信状態に基づいて操作体2と本体4との間の距離を本体4の左右方向で検出する距離計測回路44a,44bと、距離計測回路44a,44bにより検出された2つの距離の距離差に基づいて操作体2の移動方向に対する本体4の左右方向の傾きを検出するマイクロコンピュータ45とを備える。制御回路43は、検出された傾きが所定範囲外であるときには、これ以降に検出される傾きが所定範囲内となるように操舵機構51の駆動を制御する。
(もっと読む)
電気掃除機
【課題】コストの増加を抑えつつ、より高い安全性を確保できる電気掃除機を提供する。
【解決手段】掃除機本体(図示せず)内の電動送風機2を制御する制御手段20と、掃除機本体に着脱可能で塵埃を掃除機本体へ導くホース(図示せず)と掃除機本体との接続を検知する接続検知手段40と、ホースのハンドル(図示せず)に設けられ、電動送風機2の動作を停止する停止スイッチ(図示せず)を備えた操作部60と、電動送風機2が停止している場合にそれが掃除開始前なのか掃除中断状態なのかを判断する判断手段30と、判断手段30が掃除開始前であると判断した時に電動送風機2の動作を禁止する動作禁止手段21とを備え、その禁止は、停止スイッチを操作しながらホースを掃除機本体に接続した時に解除されるもので、既存の操作部60を利用してコストの増加を抑えつつ、幼児が操作部60を操作しても不用意に電動送風機2が動作することが無く安全である。
(もっと読む)
方向装置およびそれを用いた動作システム
【課題】掃除ロボットを制御する方向装置、およびそれを用いた動作システムを提供する。
【解決手段】掃除ロボットの走行ルートを制御する方向装置であって、前記掃除ロボットによって発せられ、エンコードされた無線信号を受ける受信ユニット、少なくとも1つの無線信号を発する送信ユニット、および前記受信ユニットが前記エンコードされた無線信号を受けた時、前記掃除ロボットの走行ルートを制御する第1の方向無線信号を発するように前記送信ユニットを有効にする制御ユニットを含むことを特徴とする方向装置を採用した。
(もっと読む)
自動移動可能な床塵収集装置
【課題】障害物検知を行う移動移動可能な床塵収集装置を提供する。
【解決手段】自動移動可能な床塵収集装置(1)において、電気モータ駆動手段と、塵収集容器と、フード(6)と、障害物検知手段(10)と、を備え、前記障害物検知手段(10)として、容量性及び/または誘導性を有して動作する複数の距離センサが設けられ、前記複数の距離センサは、前記床塵収集装置(1)の外殻の周囲に亘って分布されている。 前記障害物検知手段(10)としてさらに、変形可能な複数の第1の触覚要素(14)が前記床塵収集装置(1)の外殻の周囲に亘って外殻から突出した突出位置に設けられ、前記第1の触覚要素(14)の変形は、前記第1の触覚要素(14)の電気抵抗の変化により検知可能である。
(もっと読む)
表面処理ロボット
【課題】床に洗浄液を塗布して処理(清掃)を行う表面処理ロボットであって、電動機駆動および自律的制御などが可能な表面処理ロボットを提供することを目的とする。
【解決手段】前端および後端、ならびにそれらによって定義される首尾軸を有するロボット本体と、右および左駆動モジュールと、清掃幅に沿って配置されるスクラブ要素と、を備える表面処理ロボットであって、右および左駆動モジュールの各々は、外径を有するカップ形状の車輪と、外径、およびカップ形状の車輪の外径に適合する内径を有する円環状タイヤと、を備え、右および左駆動モジュールは、ロボットが清掃面を順方向に移動するときに、スクラブ要素の後部に配置され、表面処理ロボットの全質量は、10キログラムより小さいことを特徴とする、表面処理ロボットが提供される。
(もっと読む)
電気掃除機
【課題】回転ブラシの回転異常を確実に検出して使用者に報知できる電気掃除機を提供する。
【解決手段】振動検出手段57により検出した床ブラシの振動に基づいて回転ブラシ35の回転数を検出する。電動機36の特性のばらつきに拘らず回転ブラシ35の回転数を確実に検出する。検出した回転ブラシ35の回転数が所定の回転数以下であるときに回転ブラシ35が回転異常であると判断して報知するので、回転ブラシ35の回転異常を確実に検出して使用者に報知できる。
(もっと読む)
電気掃除機
【課題】低温環境下においても、確実にナノイーを発生させて、高い空気清浄効果を得ることができる電気掃除機を提供する。
【解決手段】針状放電極25と、針状放電極25を冷却するペルチェ素子23と、針状放電極25に高電圧を印加してナノイーを発生させるナノイー発生手段33と、ナノイーを排出する送風ファン35と、針状放電極25近傍に設けられて針状放電極25を温める加熱手段30と、針状放電極25の周辺温度を検知する温度検知手段29を備え、温度検知手段29で検知された温度が所定値より低い場合に、加熱手段30を作動させるもので、針状放電極25近傍の温度が下がって結露した水分が凍結しても、加熱手段30により針状放電極25周辺の温度を上げ、凍結した水分を溶かすことで、低温状況下でも、確実にナノイーを発生させ塵埃の床面への落下を早め、高い空気清浄効果を得ることができる。
(もっと読む)
電気掃除機
【課題】オゾンの発生を継続する時間、オゾンを発生させるタイミング及びオゾンの発生を停止させるタイミングを適切に制御し、掃除機外部へのオゾン漏洩を抑制しつつ、安定した脱臭効果を得ることができ、かつ安全性を向上させるとともにユーザの使い勝手を損なわないようにした電気掃除機を提供する。
【解決手段】制御部51は、電動送風機50の駆動中に異常を検出したとき、その異常を検出した直後から第1所定時間(t5)経過後にオゾン発生部30を停止させ、その異常を検出した直後から第1所定時間よりも長い第2所定時間(t6)経過後に電動送風機50も停止させることを特徴とする。
(もっと読む)
電動機制御装置、電気掃除機及び手乾燥装置
【課題】火花発生の検出を、検出精度が高く、安価な構成で実現することができ、また、異常火花が発生したときの異常過熱による発煙・発火を防止するように電動機を制御することができる電動機制御装置、電気掃除機及び手乾燥装置を提供する。
【解決手段】整流子とブラシとを有する電動機2の運転を制御する駆動手段5と、電動機2に流れる電流を検出する火花検出手段3と、火花検出手段3の出力から火花の異常を判断する火花判断手段4とを備え、火花判断手段4は、電動機2に流れる電流の所定時間内における最大値と最小値との差を求め、求めた差の値が予め設定した所定の火花判断レベルより大きいか否かを判断し、差の値が火花判断レベルを超えた回数に応じて、火花異常を判断し、駆動手段5は、火花判断手段4の出力に応じて電動機2を制御する。
(もっと読む)
電気掃除機
【課題】操作性の低下を抑制しつつ誤操作によって電動送風機を不必要に動作させることを抑制した電気掃除機を提供する。
【解決手段】制御手段43により指定したロック解除スイッチ35〜37の操作後に電源スイッチ31を操作することで電動送風機18の動作を設定可能とする。ロック解除スイッチ35〜37の指定を所定条件に対応して制御手段43が可変させる。操作性の低下を抑制しつつ誤操作によって制御手段43が電動送風機18を不必要に動作させることを抑制できる。
(もっと読む)
電気掃除機
【課題】モータの複数の運転モード毎に運転時間を測定し、これらの運転時間あるいは合計運転時間が予め設定されたモータの寿命設定時間に達したらモータを停止させることで、電動送風機の発煙を防止することができ、かつ安価な電気掃除機を提供する。
【解決手段】本電気掃除機は、フィルタ手段と、整流子およびブラシを有するモータとファンからなり、かつ複数の運転モードで運転される吸引用の電動送風機と、この電動送風機を制御する制御手段と、電動送風機の運転時間を計測するタイマと、このタイマが計測した運転時間を記憶する不揮発性メモリとを備え、タイマは運転モード毎に運転時間を計測し、制御手段は計測された運転時間を不揮発性メモリに記憶し、この不揮発性メモリに記憶された各運転モードの総運転時間が、運転モード毎に予め設定されたブラシの磨耗寿命となる寿命推定時間に、あるいは、各運転モードの総運転時間の和が合計寿命時間に達したら電動送風機が停止する。
(もっと読む)
吸口体及びこの吸口体を用いた電気掃除機。
【課題】視認性が良好で意匠性にも優れた大型表示装置を備えた吸口体及びこの吸口体を用いた電気掃除機を提供する。
【解決手段】自在連結部500は、管状の下腕部560と管状の上腕部580とから構成され、下腕部は、その長手方向の一端を、第1回転軸部を介して、吸口本体510と回転可能に連結し、他の一端は、上腕部の一端と第2回転軸部を介して回転可能に連結され、第1回転軸部と第2回転軸部は、吸口本体の長手方向と平行に配置される水平回転軸P1又は、この水平回転軸P1と直交する垂直回転軸P2の一方を備え、吸口本体に対して、水平回転軸P1を介して、回転する下腕部または上腕部は、空気漏れなく連通するケーシング部材561と、このケーシング部材の外側をカバーするカバー部材562とケーシング部材との間に配置される光源部564を備えた表示基板565が設けられ、カバー部材は、光源部からの光を拡散する導光部566を備える。
(もっと読む)
1 - 20 / 87
[ Back to top ]