
Fターム[3C007AS28]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 水中用 (9)
Fターム[3C007AS28]に分類される特許
1 - 9 / 9
クランパ、水室内作業装置およびクランプ方法
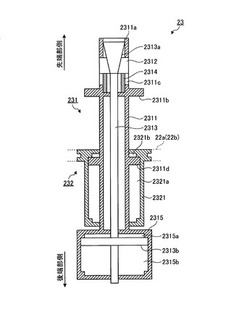
【課題】管材を安定的にクランプ保持できるクランパ、水室内作業装置およびクランプ方法を提供すること。
【解決手段】このクランパ23は、管板137に配置された管材132に挿入されて管材132をクランプする。また、クランパ23は、管板137あるいは管材132に当接可能な当接部2311bを有すると共に挿入部2311aを管材132に挿入して管材132をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。
(もっと読む)
配管内作業装置および配管内作業方法

【課題】本発明は、配管を取り外すことなく、配管内面を精度良く正確に移動可能で、配管内の洗浄、点検、検査、予防保全、補修などの作業について、配管を損傷させることなく、安全、確実に実施する。
【解決手段】配管2の内側から各種作業を行う。配管内作業装置1は、走行駆動部3a、3bと、作業装置5と、回転支持機構部9a、9bと、連結機構6と、吊り下げ装置8a、8bと、を備え、走行駆動部3a、3bを配管2の内面に挿入可能とし、これら走行駆動部3a、3bによって作業装置5をこの配管2の内面に沿って円周方向に移動可能に構成したものである。
(もっと読む)
加圧水形原子炉の炉心の装荷または取出しを支援するための装置
加圧水形原子炉の炉心に装荷し、またはこれから取り出すための装置において、炉心の取り出すべきまたは装荷すべき燃料集合体位置(52)に隣接した燃料集合体(50)に対して、この燃料集合体(50)の上側領域で、この燃料集合体(50)の軸線方向(57)に直角方向に作用する力(F)が加えられる。水中で自由に操縦可能な潜水体(2)が装置として利用され、この潜水体に少なくとも1つの張出し可能な支持腕(22、24)が配置されており、この支持腕が燃料集合体(50)に向かって少なくとも間接的に当接可能である。 (もっと読む)
物体表面に密着し移動可能な装置
【課題】負圧領域を備えたことにより物体表面に密着し且つ物体表面に沿って移動可能な装置において、該負圧領域が装置を包囲する流体とは異なる気体で満たされている装置を提供する。
【解決手段】液体中に在る物体表面に密着しながら物体表面に沿って移動可能な装置において、少なくとも外側のケーシングと外側シール部材と内側シール部材とが物体表面と協働して第1領域11を規定し、また、少なくとも該内側のケーシングと該内側シール部材とが物体表面と協働して規定した第2領域12を具備したことを特徴とし、該第1領域11に在る流体の圧力が装置を包囲する流体の圧力より低い圧力に維持されており、また、該第2領域12に在る流体の圧力が該第1領域に在る流体の圧力より高い圧力に維持されている。
(もっと読む)
多関節構造体、それを用いた装着具、システムおよびヒューマンマシンインターフェース
【課題】多関節構造体の長さを手動で任意に変更可能とする。
【解決手段】本発明の多関節構造体は、各関節間の連結部にポテンショメータ等の変化量検出センサが設けられ、1ないし複数のセンサをグループ単位とし、前記グループ単位に前記センサの信号が信号処理部に取り込まれ、前記信号処理部間は通信ネットワークに接続され、前記通信ネットワークに接続された処理演算部が、前記センサの信号データに基づいて演算処理する多関節構造体において、前記多関節構造体の形状が変形した際に、前記関節間の連結部の変化量をリアルタイムに検出し、前記関節の並進、回転移動した際の移動量及びベクトルを出力する構成とされる。
(もっと読む)
魚状ロボット
【課題】 尾鰭や胸鰭の遥動によらずとも、この魚状ロボットを前進又は後退させることが可能な魚状ロボットを提供する。
【解決手段】尾鰭17を含む胴後部16を遥動させることによって水中を遊泳することが可能に構成されていて、重心を長手方向に移動する重心移動機構40によってこの魚状ロボット10に長手方向の傾きを与えたうえ、浮沈タンク31内の水量を変えることによってその魚状ロボット10の見掛け比重を調節し、それによって生じた、浮力と重力との差を推進力として、必ずしも、電力消費の大きい、尾鰭17を含む胴後部16の遥動によらずとも、この魚状ロボット10を前進又は後退させることが可能に構成されている。
(もっと読む)
水中用把持具
【課題】
通常では人の手が届かず、目視で確認することも困難な水中にある落下物を、軽量且つコンパクトな構造で容易に回収できる水中用把持具を提供すること。
【解決手段】
本発明の水中用把持具1によれば、筒状の本体部10と、本体部10を吊り下げる吊り下げ部材11と、本体部10の内部で昇降自在に設けられた内部昇降体15と、内部昇降体15を昇降させる牽引部材16と、内部昇降体15に取り付けられ、内部昇降体15の上昇により本体部10内に収納される際、弾性変形により互いに接近して水中の落下物を把持する複数本の爪17とを備えている。水中用把持具1は、本体部10と吊り下げ部材11との別体とし、落下物の落下深さに吊り下げ部材11の長さを合わせるようにしたので、水中の落下物を容易に回収することを可能にした。
(もっと読む)
ロボットシステム
【課題】 ロボットシステムにおいて、計算機にかかる負荷を軽減し、また特定自由度への外乱の影響を協調的に調整することを可能とし、全体としての移動運動などパフォーマンスを安定維持することができるようにする可能とする。
【解決手段】 個々にアクチュエータを備えた複数の構造体からなり、各アクチュエータの自由度毎に対応して設けた複数の計算機を備える。各アクチュエータの計算機は通信ネットワークを介して結合し他のアクチュエータのセンサ情報を含む他の計算機の内部状態を取得する。各計算機には、各自由度の運動制御のため非線形振動子モデルを備え、前記非線形振動子モデルは他の計算機からの周期パターン入力に対して、自律的に振動周期を合わせ、また結合係数により決まる位相差を協調的に生成する。また全てのネットワーク結合されている計算機内で共有されたメモリを個々に備え、常に通信を介して更新する。
(もっと読む)
移動マニピュレータの遠隔操作装置
【課題】 移動体に搭載されたマニピュレータを遠隔地点から操作する際、移動体に設けたビデオカメラによりマニピュレータを撮影し、遠隔地の操縦者の側に設置したモニターに表示しマニピュレータを操作するものにおいて、モニター映像では移動体がスリップしたか物体が移動したかがわからないことがあった。
【解決手段】 例えば海底作業のため移動体1にマニピュレータ2とビデオカメラ3を搭載し、ビデオカメラ3の映像をモニター11に表示し、操縦者はこの画面を見ながらジョイスティック5を操作して、移動体操作信号7、マニピュレータ操作信号8、ビデオカメラ操作信号9を出力し作業を行う。移動体のスリップをスリップ量・方向検出部12で検出し、X−Yステージ駆動制御部13でジョイスティック5が搭載されたX−Yステージ14を同様に移動し、操縦者にスリップの状態を手首を通して体感させることができる。
(もっと読む)
1 - 9 / 9
[ Back to top ]