
Fターム[3C007BS04]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 3関節直角座標型 (108) | わく型 (11)
Fターム[3C007BS04]に分類される特許
1 - 11 / 11
パワーアシスト装置
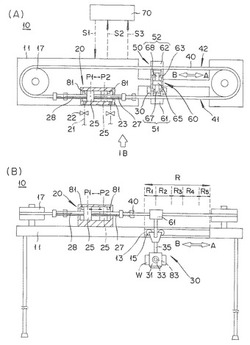
【課題】小型化および製造コストの低減が図られたパワーアシスト装置を提供する。
【解決手段】パワーアシスト装置10の制御部70は、クランプ部50による伝達部材40のクランプまたはアンクランプを切り替えることによって、ピストン25の移動を、搬送部材40を移動するためのアシスト力または搬送部材を制動するためのアシスト力に変換し、搬送経路Rに沿ってワークWを搬送させる搬送作業を円滑に行うことを可能にする。
(もっと読む)
ツイストスライド機構及びロボット

【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
2足移動体の補助装置
【目的】ロープ状の接続部材の緩み量をできるだけ少なくし、2足移動体が姿勢を崩して転倒しかけた場合、その荷重を支持するときの衝撃を減少させるようにした2足移動体の補助装置を提供する。
【解決手段】2足移動ロボット12にロープ状の接続部材(18)を介して接続されると共に、2足移動体が姿勢を崩したときに2足移動体を上方から支持するリフタ(14)からなる2足移動体の補助装置において、リフタを3次元空間において移動自在なリフタ移動手段(20、22、24、26、28、30)と、リフタ移動手段の動作を制御するリフタ制御部(38)と、3次元空間における2足移動体の位置を検出する検出手段(32、34)とを備えると共に、リフタ移動手段制御手段は、検出された位置に基づいてリフタが2足移動体に追従するようにリフタ移動手段の動作を制御するように構成する。
(もっと読む)
位置制御方法、ロボット
【課題】ロボットのアームが変形する場合にもアームを位置精度良く制御する方法を提供する。
【解決手段】手部16の位置を制御する位置制御方法にかかわる。手部16の移動と手部16の移動量の検出とを並行して行い、手部16を目標とする場所に接近させる制御を行う第1移動工程と、手部16の移動と手部16が位置する場所の検出と目標とする場所の検出とを並行して行い、手部16を目標とする場所に移動させる制御を行う第2移動工程と、を有する。
(もっと読む)
移動体の位置決め装置
【課題】水平軸まわりに回動する操作ハンドルを有する移動体の位置決め装置において、操作ハンドル部が回動しているときであっても、操作力入力方向と同一方向に移動体を移動させて移動体の位置決めができる移動体の位置決め装置を提供する。
【解決手段】ベース部22とハンドル部40との間に、平行移動可能な自由度をもたせ、両者間の変位や荷重を検出する際に、検出部材を回動自在とし、検出部材と共に設けられた重力方向保持手段によって重力方向に対して一定方向に保持させることにより、操作ハンドル40bを水平軸まわりに回動させている場合においても、操作力入力の方向と大きさに応じた検出信号出力を、別系統の角度センサ等を用いずに取り出すようにした。
(もっと読む)
物体入れ換え装置および物体移動装置
【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
基板搬送装置
【課題】基板の予備位置決め機構を搬入ステージ、露光ステージに設置することなく、露光ステージに搬送する前に基板の予備位置決めを行うことができ、ピンの設置位置の調整も簡単な基板搬送装置を提供することを課題とする。
【解決手段】前記搬入ステージ30上の基板Wの端面を押動して予備位置決めを行う予備位置決め機構2と、この予備位置決め機構を支持本体12により支持すると共に、予備位置決めされた基板を吸着して保持し前記露光ステージ40に搬送する搬送機構20とを備え、前記予備位置決め機構は、前記支持本体に支持された駆動手段6と、この駆動手段により駆動して前記基板の端面を押動する押動手段2とを有し、前記駆動手段は、円筒形の磁気軸体7と、この磁気軸体を軸周りに回動させる回動手段8と、この回動手段により回動する磁気軸体の周面に対面させて設けた直線状の第1長尺磁気体9Aおよび第2長尺磁気体9Bと、を有する構成とした。
(もっと読む)
パーソナルアフェクターマシーン
本発明は、概してマシーンに関し、より具体的には、パーソナルアフェクターマシーンを提供するためのシステムおよび方法に関する。一実施形態において、本発明は、上面フレーム、横断部材(横断部材は、上面フレームから延び、上面フレームに対して並進および回転のうちの任意の運動をするように構成可能である)、アフェクターヘッド(アフェクターヘッドは、横断部材に結合され、上面フレームに対して並進、回転および旋回のうちの任意の運動をするように構成可能であり、アフェクターを有する)、底面フレーム(底面フレームは、上面フレームに結合されている)、およびカセット(カセットは、その中に材料を取り外し可能に固定するように構成可能であり、底面フレームに取り外し可能に装着可能である)を含み、アフェクターは、カセットの中の材料を複数の次元においてアフェクトするように構成可能である。  (もっと読む)
(もっと読む)
直交ロボットおよび電子部品実装装置
【課題】稼働中の発熱に起因する負荷変動を緩和する直交ロボットおよび電子部品実装装置を提供する。
【解決手段】一対のYロボット11に直交した状態で架設したXロボット12を構成するビーム15の一方の端部をX方向への移動が拘束された状態で一方のYロボット11に連結し、ビーム15の他方の端部をX方向への移動が拘束された状態とX方向への移動が許容された状態の何れかの状態で他方のYロボット11に連結した。ビーム15のX方向への移動が許容された状態においては、ビーム15の内部応力を開放することが可能となり、直交ロボット10の稼働中の発熱に起因する負荷変動を緩和することができる。
(もっと読む)
操作装置と、操作子の動作調節方法と、そのためのプログラム
【課題】操作子に適度な操作反力を再現する汎用性の高い技術を提供する。
【解決手段】操作装置は、操作子と、操作力を検出する操作力検出手段と、操作子の速度を検出する速度検出手段と、検出した操作子の速度に、検出した操作力に起因する加速度と単位時間から計算される速度変化量を加味することによって、第1速度を算出する第1速度算出手段と、算出した第1速度と反対向きの反対力を設定する反対力設定手段と、算出した第1速度に、設定した反対力に起因する加速度と単位時間から計算される速度変化量を加味することによって、第2速度を算出する第2速度算出手段と、操作子の速度を算出した第2速度に調節するアクチュエータとを備えている。反対力設定手段は、算出した第1速度が所定速度以下のときに、第1速度を単位時間でゼロに減じる加速度から計算する力を、反対力に設定することを特徴とする。
(もっと読む)
三軸駆動装置
【課題】ケーブルベアによる騒音の発生を抑制できると共に可動部の軽量化を図ることのできる三軸駆動装置を提供する。
【解決手段】第2のプーリ23を駆動するプーリ駆動機構26を、第2のプーリ23と一体に回転し且つ第2のプーリ23を図中Y軸方向に移動可能に支持するスプライン軸27と、このスプライン軸27の一端部に設けられた第3のプーリ28と、この第3のプーリ28を介してスプライン軸27を駆動する第3のベルト式駆動機構29とで構成する。
(もっと読む)
1 - 11 / 11
[ Back to top ]