
Fターム[3C007BT10]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426) | つれまわり防止機構を有するもの (8)
Fターム[3C007BT10]に分類される特許
1 - 8 / 8
ロボットの移動方向決定方法及びロボットの制御装置
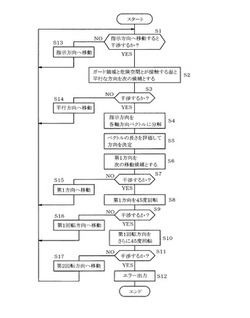
【課題】ユーザがロボットをリアルタイムで動作させる場合でも、ロボットを動作領域の限界まで動作させる。
【解決手段】ロボットの動作領域空間をキューブの集合として捉え、各キューブの外面を規定する3次元座標値を決定し、それらを安全空間と危険空間との何れかに評価した空間評価データを用い、手先部分を覆うガード領域Gを設定する。ユーザが、ジョイスティックで指示した方向に手先を移動させ続けるとガード領域Gと危険空間が干渉する場合で両者が面で接触すれば、その面と平行な方向に手先を移動可能であれば単位距離だけ移動させた後(S14)、指示方向への移動を再試行する。両者が面で接触しない場合,又はガード領域Gが干渉する場合は、指示方向を3つの方向ベクトルに分解して第1方向,第2方向を定め(S5)、手先を第1方向に移動可能であれば単位距離だけ移動させた後(S15)指示方向への移動を再試行し、干渉する場合は第1方向を45度回転させた方向を次に移動させる候補にする(S8)。
(もっと読む)
医療用マニピュレータ

【課題】先端動作部の軌跡精度や位置決め精度を効果的に向上できる医療用マニピュレータを提供することを目的とする。
【解決手段】医療用マニピュレータ10における先端動作部12は、エンドエフェクタ19と、ヨー軸Oyを中心に動作可能な主軸部材100と、ロール軸Orを中心に動作可能なギア体102とを有する。ヨー軸操作指令を受けた場合、ヨー軸駆動系のガタ分を補償するように、主軸部材100の駆動源である第1モータ50aの補償制御がなされる。ロール軸操作指令を受けた場合、ヨー軸駆動系のガタおよび弾性変形に起因するヨー動作の発生を防止または抑制するように第1モータ50aの補償制御がなされる。
(もっと読む)
関節駆動装置及び多軸マニピュレータ
【課題】関節駆動装置の数を関節の数と等しくすることができ、駆動力伝達用の線状部材の経路長の変化を各関節部で解消することができるとともに、駆動力伝達用の線状部材の交換を短時間で容易に行うことができ、利便性を高めることができるようにする。
【解決手段】所定のリンク部材と次のリンク部材とを回転可能に接続する関節軸上に配設された関節部の駆動用の線状部材から駆動力を受けて回転することによって所定のリンク部材に対して次のリンク部材を回転させる被駆動部材と、関節軸上に配設された経路長補償ユニットであって、所定のリンク部材に対応して配設された他の関節部の駆動用の線状部材からの駆動力を、次のリンク部材に対応して配設された他の関節部の駆動用の線状部材に伝達するとともに、他の関節部の駆動用の線状部材の経路長の変化を吸収する経路長補償ユニットとを有する。
(もっと読む)
ロボットハンド及びこれを含むロボット
【課題】 指構造体における関節のうちの一部の動きが他の関節の動作に影響を与えないように構造を改善したロボットハンド及びこれを含むロボットを開示する。
【解決手段】 MP関節部のうち、ロール方向に回転するMPロール関節部とピッチ方向に回転するMPピッチ関節部は、オフセットが形成されるように互いに離間して配置される。このような構造により、各関節部の可動角が大きくなり、正確な制御が可能になる。また、ロボットハンドの内部における全体的な摩擦が減少し、システム全体が安定化する。
(もっと読む)
チャック装置
【課題】仮載置した部品の傾斜が大きくなっても、部品の傾斜に倣って傾き、部品を確実にチャックすることができるチャック装置を提供する。
【解決手段】チャック本体3に対して、直動駆動手段2の直動中心軸に、案内手段5を介して揺動変位可能に設けてなるチャック部材搭載部6と、このチャック部材搭載部6に搭載したチャック部8,8とにより、前記チャックすべき部品Pをチャックする際に、ワーク接触部9を前記部品Pに予め接触させて、前記部品Pの載置状態を前記チャック部材搭載部6に伝達し、前記チャック部8,8によるチャック位置を補正するようにする。
(もっと読む)
関節構造体
【課題】 関節の動きに影響を受けず駆動力を伝達することが可能な関節構造体及び該関節構造体を備えるロボットアームを提供する。
【解決手段】 第1平行リンク9−1と、第2平行リンク11−1と、第1回転ガイドプーリ8−1と、直径が第1回転ガイドプーリと略等しい第2回転ガイドプーリ10−1とを備え、第1回転ガイドプーリ8−1、第2回転ガイドプーリ10−1、第2構造体2の順にワイヤ7−1を渡す。
(もっと読む)
回動伝達装置
回動伝達装置においては、第1遊星ギヤ機構は、第1ギヤ、第2ギヤ、第1遊星ギヤ体及び第1キャリア体を有している。第2遊星ギヤ機構は、第3ギヤ、第4ギヤ、第2遊星ギヤ体及び第2キャリア体を有している。第3ギヤ、第4ギヤ及び第2遊星ギヤ体のピッチ円径比は、第1ギヤ、第2ギヤ及び第1遊星ギヤ体のピッチ円径比と同じである。第1ギヤ、第2ギヤ及び第1キャリア体のうちのいずれか1つである連結要素は、連結要素に対応する要素と一体に回動するようになっている。第1基体側要素は第1基体に接続され、第2基体側要素は第2基体に接続されている。第1基体側要素に対応する要素と第1回動体との間で回動が伝達され、第2基体側要素に対応する要素と第2回動体との間で回動が伝達される。  (もっと読む)
(もっと読む)
建築物の外壁面作業装置
【課題】 作業工具の重量を担荷して作業者の負担を軽減できると共に工具を所望位置に容易に移動でき、また、工具ヘッドの移動による重心移動や慣性力も小さい建築物の外壁面作業装置を提供する。
【解決手段】 図示外壁面作業装置1は、固定基部10の背面支柱12の上端部にアーム駆動機構40によって駆動されるアーム機構30を備えて構成され、ゴンドラ装置2のゴンドラケージ2Aに、着脱可能に装着される。アーム機構30は、その先端の工具ヘッド50に工具ユニットを支持し、制御装置90によるアーム駆動機構40の制御駆動によって揺動操作されて、工具ユニットによって建築物の外壁面に対して穿孔やブラッシング等の作業を行うように構成されている。
(もっと読む)
1 - 8 / 8
[ Back to top ]