
Fターム[3C007GU06]の内容
マニピュレータ、ロボット (46,145) | 物品離脱手段 (75) | 流体シリンダ (5)
Fターム[3C007GU06]に分類される特許
1 - 5 / 5
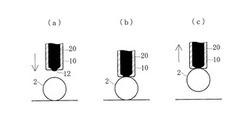
微小部品の操作方法
【課題】
装置が簡便で操作が容易で、微小部品の形状を問わず操作が可能であり、微小部品に機械的な損傷を与えにくい微小部品の操作方法を提供することにある。
【解決手段】
キャピラリに液体を満たし、キャピラリの先端のキャピラリ穴から液体が漏れ脱さない表面張力と内圧とが均衡した状態で、キャピラリ穴を微小部品に接触させ、キャピラリを上昇させることにより液体の液架橋力により微小部品を持ち上げ、キャピラリを微小部品を載置したい設置面の位置の上方に移動し、位置でキャピラリを下降させ、微小部品が位置に着地した状態でキャピラリを横方向に移動させて液体を微小部品及び設置面に漏れ出させ、その後、キャピラリを上昇させ微小部品を位置に載置することを特徴とする。
(もっと読む)
部品吸着ノズル及び部品搭載装置

【課題】ノズル内の残圧による搭載位置ずれや持ち帰り(未搭載)、及び、ブローによる部品の吹き飛ばしや位置ずれを防止することができる部品吸着ノズル及び部品搭載装置を提供する。
【解決手段】部品吸着時に負圧が供給され、部品離脱時に正圧が供給される部品吸着ノズル14において、ノズル内部に設けられた、部品吸着時に前記負圧により開かれ、部品離脱時に前記正圧により閉じられる弁40と、該弁40の内側に張られた、伸縮性のある膜部材と、を備える。
(もっと読む)
永久磁石を用いたワーク吸着装置
【課題】 ロボットによる曲げ加工システムにおいて、複雑な電気回路を設けることなく、群管理が可能であって、設置スペースが少なくて済み、段取り時間を短縮し、ワークを確実に解放できる永久磁石を用いたワーク吸着装置を提供する。
【解決手段】 シリンダ5の下端部を、ワークWに当接自在な当接ストッパとし、該ワークWを吸着する永久磁石9を、シリンダ5内のピストン7下端部に設けた。上記シリンダ5が、ロボット3のハンド本体4に多数取り付けられ、各シリンダ5の下端部には、弾性体で形成された当接ストッパ6が設けられていると共に、各シリンダ5の上端部には、エア配管21が結合され、該エア配管21は、既存のバキュームパッド用エア回路31に接続されている。
(もっと読む)
球状農作物の把持機構
【課題】 ゴム材で細長風船状に形成された複数本のフィンガーを備え、フィンガー内部への圧力流体の供給によってフィンガーを内向きに屈曲変形させるよう構成した球状農作物の把持機構において、補強糸を合理的に巻き付け装着して、耐久性を低下させることなくフィンガーを適切に屈曲作動させて球状農作物を良好に把持することができるようにする。
【解決手段】 フィンガー12の外向き周面に、フィンガー長手方向に略等ピッチで屈曲する蛇腹部25を形成するとともに、フィンガー12の内向き周面に、蛇腹部15の外向き山部15aに対向する複数の横長凹入溝26を並列形成し、蛇腹部25の外向き谷部25bと横長凹入溝26に亘って、フィンガー12の内向き周面より突出しない太さの補強糸27を一連に巻き付け装着してある。
(もっと読む)
ワークチャック装置及び方法
【課題】 チャック動作の際にワークに損傷を与えることを防止できるワークチャック装置及びその方法を提供する。
【解決手段】 本発明のワークチャック装置10は、ワークWを狭持する一対の把持部11,12と、ワークが狭持される方向に一対の把持部を付勢する弾性部材16と、一対の把持部に当接可能なシリンダロッド15a,15bを有し、シリンダロッドを進退移動させるシリンダ14a,14bとを備え、ワークの狭持を解除する場合に、シリンダが、シリンダロッドによって一対の把持部を弾性部材の付勢の方向と反対側へ移動させるように構成されている。
(もっと読む)
1 - 5 / 5
[ Back to top ]