
Fターム[3C007HT40]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | ブレーキを有するもの (102)
Fターム[3C007HT40]に分類される特許
101 - 102 / 102
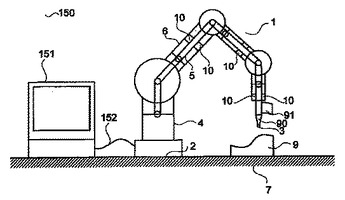
ロボット

【課題】 ロボットの作動を停止するためにアクチュエータに加える電力供給を停止しても、ワイヤが弛緩しないロボットを実現する。
【解決手段】 ロボットは、一方側部材16と、その一方側部材16に回転可能に接続されている他方側部材18と、一端部が前記他方側部材18に接続されているワイヤ30、31、32と、そのワイヤ30、31、32の他端部に接続されており、電力が供給されるとワイヤを伸縮するアクチュエータ22、23、24を備えている。このほかに、電力が供給されると前記アクチュエータ22、23、24をロックするロック手段と、前記アクチュエータ22、23、24に供給する電力がオンであればオフに反転し、オフであればオンに反転し、反転した電力を前記ロック手段に供給する反転手段を備えている。
(もっと読む)
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
101 - 102 / 102
[ Back to top ]