
Fターム[3C007HT40]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | ブレーキを有するもの (102)
Fターム[3C007HT40]に分類される特許
81 - 100 / 102
位置決めロボット
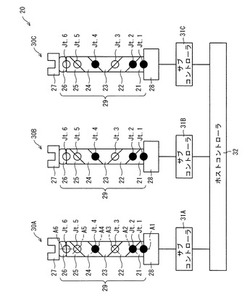
【課題】 破損を防いでワークを協働して目標位置に位置合わせすることができる位置決めロボットを提供する。
【解決手段】 各多関節アーム30A〜30Cに設けられる各関節部Jt1〜Jt6のうちで、少なくとも1つが非駆動関節部となる。非駆動関節部が連結するアーム体は、駆動関節部に設けられるサーボモータ41によるアーム体の変位に追従して、受動的に相対変位する。ハンド部27の把持位置のずれ、アーム体の機械的誤差およびサーボ遅れなどの誤差によって駆動関節部に設けられるアーム体がずれたとしても、このずれに追従して非駆動関節部に連結されるアーム体が変位することによって、ワークなどに生じる変形力を逃すことができ、ワーク40および位置決めロボットの破損を防ぐことができる。
(もっと読む)
把持部材移動方法及び装置

【課題】線状柔軟リンクの巻き取りとロボットアームの振りを協調的に行わせることにより、装置を大型化することなく把持部材に大きな瞬発力を与え、把持部材が床を引きずられることなく物体を移動させる方法及び装置を提供すること、ならびにリンクの剛性を可変にできる機構を提供する。
【解決手段】線状柔軟リンクの引っ張り動作と線状柔軟リンクの巻き取り動作を協調して行うことにより、線状柔軟リンクの先端の把持部材に把握された物体を移動させる。また、ロボット本体に設置された駆動関節に剛体アームを装着し、該剛体アームには線状柔軟リンクの巻き取り手段及び案内手段を設け、剛体アームの揺動と線状柔軟リンクの巻き取りとを協調して行う制御手段を設ける。
(もっと読む)
脚車輪型移動ロボット及びその動作方法
【課題】脚先端部の構成を複雑にすることなく、脚が接地面に着地した時に受ける衝撃荷重の水平成分を緩和することができる脚車輪型移動ロボット及びその動作方法を提供する。
【解決手段】本体1と、交互に進行方向に振り出され歩行できるように、水平軸心を中心に回動可能に本体に連結され伸縮又は折り曲げ可能な複数の脚3、5と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を転動する車輪9と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボット10において、脚3、5の着地時にその車輪9が回転自在となっているように、前記脚3、5が接地面に着地する前に、前記脚の制動装置を非作動にする。
(もっと読む)
脚車輪型移動ロボット、その動作方法及びプログラム
【課題】ロボット内部に過大な応力を発生させずに姿勢変更動作を高ゲインの局所位置フィードバック制御により行うことができる脚車輪型移動ロボット、その動作方法及びプログラムを提供する。
【解決手段】本体1と、本体1に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚3、5と、複数の脚3、5のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪9と、車輪9の回転を制動するブレーキと、を有する脚車輪型移動ロボット10において、駆動モータを制御し本体1の姿勢を変化させる時に、複数の脚3、5の少なくともいずれかのブレーキを非作動にし、車輪9が回転移動可能となった該脚から、本体1の姿勢変化によってロボット内部に蓄積される応力を外部に解放する。
(もっと読む)
荷重補償機構
【課題】多数の質量に対して容易に対応することのできる荷重補償機構を提供する。
【解決手段】荷重補償機構1は、基台2と、該基台2に一端側が回転軸3で回動可能に取付けられ他端側で被運搬体4を支持する作動アーム5と、該作動アーム5の先端部に一端が固定端9として取付けられているとともに前記作動アーム5の略中央部の基準点11を経て他端が前記作動アーム5の作用点10に取付けられているバネ機構6と、を備えていて、前記作動アーム5および被運搬体4のトルクを前記作動アーム5の傾斜角度に拘わらず前記バネ機構6の弾性力により補償する。前記回転軸3から前記作用点10までの距離hを作用点位置移動操作機構21により増減可能にした。
(もっと読む)
回転ブレーキ装置
【課題】小形化が可能で、関節リンク機構の関節部などに簡単に装着することができ、回動部にブレーキをかけて確実にロックし得るブレーキ装置を提供する。
【解決手段】ブレーキ輪本体6の環状ブレーキ板部61にブレーキ力となる押圧力を印加するブレーキ中間輪9がケース1内に回動を阻止し軸方向に移動可能に嵌入される。ケース1の端部には、ロータリーアクチュエータ16によって回動されるブレーキ外輪2が回転可能に嵌入される。ブレーキ外輪2とブレーキ中間輪9の対向する面には、各々複数の円弧状傾斜面を段差部を介して円周状に配置した第1環状傾斜面22と第2環状傾斜面91が形成される。第1環状傾斜面22と第2環状傾斜面91の間には、円弧形のリテーナ内に複数のローラ4を回転自在に支持してなるローラ組付体3がローラを両側から挟むように配設される。
(もっと読む)
作業補助装置
【課題】対象物を小さな操作力で移動させることができ、かつ対象物が設定された許容範囲を外れた場合でも安定して対象物を許容範囲内へ戻すことができる作業補助装置を提供する。
【解決手段】作業補助装置10は、対象物30を取り付ける多関節アーム11を備える。モータ36が発生するトルクがワイヤ32を介してリンク12aを鉛直上方に引っ張ることで重力によって多関節アーム11が鉛直方向に揺動することを抑制する。各関節14はリンク12が揺動する際の抵抗力を調整可能に付与する抵抗力付与機構16を備える。コントローラ22は対象物が許容範囲50内のときは抵抗力付与機構16が各関節に付与する抵抗力を小さくする。対象物が許容範囲50外のときは抵抗力を大きくする。抵抗力は多関節アーム11の動かし難さを調整するので各関節に付与する抵抗力を大きくしても対象物が操作力の方向とは反対の方向に移動することを防止できる。
(もっと読む)
多関節ロボット
【課題】 各種用途に臨機応変に適応できるようにして汎用性を高める。
【解決手段】 位置が固定されるベース部6と、このベース部6を支点として旋回アーム7の一端7s側を水平方向に回転させる水平回転機構8と、この旋回アーム7の他端7t側から起立し、かつ支持部9をZ軸方向へ移動させるZ軸移動機構10と、前アーム部3と後アーム部4を回動軸部11を介して連結したアーム機構5を有し、このアーム機構5の後端5r側を装着位置の変更可能な着脱部12を介して支持部9に装着するとともに、アーム機構5の後端5r側を回転させることにより、アーム機構5の先端5fに支持するチャック部2をX軸方向に移動させるX軸移動機構13を具備する。
(もっと読む)
ロボットの制御装置
回転可能なアーム15と、アーム15を駆動するモータ11と、モータ11の回転位置を検出して位置検出信号を発生する位置検出器12と、アーム15の回転を規制するストッパー23と、モータ11の回転を拘束及び開放するブレーキ13と、モータ11を駆動するサーボ制御部33と、サーボ制御部33を無効にする共に、ブレーキ13を開放する解除操作スイッチ42と、解除操作スイッチ42の動作によりストッパー23とアーム15との角度に応じてブレーキ13を拘束又は開放の時間を変更するブレーキ制御部37と、を備えたものである。  (もっと読む)
(もっと読む)
多関節ロボットのモータブレーキ解除装置
【課題】 電磁ブレーキ解除後のロボットアームの急激な下降動作を防止することが可能な多関節ロボットのモータブレーキ解除装置を提供する。
【解決手段】 多関節ロボット50の各関節にそれぞれ設けられたモータの各端子間に接続される制動抵抗22と、各関節のモータ毎に設けられ、そのモータの電磁ブレーキを解除する電磁ブレーキ解除スイッチSW1〜SW6とを備え、電磁ブレーキ解除スイッチSW1〜SW6によって電磁ブレーキが解除された際、その解除された電磁ブレーキに対応するモータの発電制動により、当該モータに連結されたロボットアームの自重による下降動作に制動をかけるようにしたものである。
(もっと読む)
基板搬送装置および基板処理装置
【課題】緊急遮断回路によって主電源からモータへの電力の供給が遮断された状態で、モータが有するブレーキの作動を解除することができる基板搬送装置および基板処理装置を提供する。
【解決手段】サーボモータ12には、主電源17から給電経路18を介して電力が入力されるようになっている。給電経路18上には、緊急遮断スイッチ9の押操作に応答して、主電源17からサーボモータ12への電力の供給を許容する導通状態からその電力の供給を遮断する遮断状態に切り替わる緊急遮断回路19が設けられている。緊急遮断回路19が遮断状態であっても、ブレーキリリースユニット10を接続部11に接続すれば、ブレーキリリースユニット10の充電池21に蓄えられている電力が、サーボモータ12のブレーキリリース電流入力端子14に入力されて、サーボモータ12のブレーキの作動が解除される。
(もっと読む)
ロボット機構
【課題】
外部から手動で動かすことができる受動状態と、動力でロボットを動かす能動状態とに切り換えられるようにする。
【解決手段】
第1クラッチ65によって、第1駆動系D1の駆動伝達経路を開放して、スライダ24のスライド移動及び第1リンク材42の回動運動が自由となる受動状態とすれば、人間の腕力等の外力よって、スライダ24、第1リンク材42及び第2リンク材46を動かすことができる。第1クラッチ65によって、第1駆動系D1の動力がスライダ24及び第1リンク材42に伝達される能動状態とすれば、第1モータ72によって、スライダ24、第1リンク材42及び第2リンク材46を動かし、作業を進めることができる。
(もっと読む)
サーボモータ制御装置
【課題】両モータの停止時相対回転位置のずれ量を短時間に補正することができるサーボモータ制御装置を提供する。
【解決手段】被加工物を動作制御する2個のサーボモータの駆動中に両モータへの電力の供給が突然遮断され両モータのブレーキ機構の制動差によって両モータの停止時の回転位置にずれが発生したときにこのずれを補正する手段を有するサーボモータ制御装置において、両モータへの電力の供給が再開されたときは両モータの停止時回転位置を検出する検出手段と、検出された両モータの停止時回転位置に基づいて両モータの停止時回転位置間の差である停止時相対回転位置を算出しこの停止時相対回転位置と予め定められた初期設定相対回転位置とのずれ量を算出するずれ量算出手段と、ずれ量が零になるように両モータのいずれか一方又は両方を自動的に回転駆動させる補正駆動手段とを備えている。
(もっと読む)
サーボモータのブレーキ寿命監視方法および装置
【課題】サーボモータが具備する電磁ブレーキの劣化や寿命の到来を監視することが可能なブレーキ寿命監視方法および装置を提供する。
【解決手段】電磁ブレーキ6を有するサーボモータ5を駆動源とした機械におけるサーボモータ5のブレーキ寿命監視方法において、機械が非常停止した場合について、非常停止信号発生時におけるサーボモータ5の回転角度および角速度と、サーボモータ5の実際の停止時におけるサーボモータ5の回転角度とをそれぞれ検出し、これら検出した値に基づいて電磁ブレーキ6の仕事量を算出し、この電磁ブレーキ6の仕事量を機械が非常停止する毎に積和することにより電磁ブレーキ6の総仕事量を算出し、この電磁ブレーキ6の総仕事量に基づいて電磁ブレーキ6の寿命を監視するようにした。
(もっと読む)
産業用ロボットの旋回装置
産業用ロボットの旋回装置は、モータ30のモータシャフト30sに固定してモータ30を停止するブレーキ40と、モータシャフト30sが固定してモータ30の回転角度を検出するエンコーダ50と、モータャフト30sと結合して連通中空部が形成されると共に、モータ30の回転を減速して回転側アーム20に連結固定された減速機60と、固定側アーム10に設けられ、連通中空部に連通された管用軸受け72と、回転側アーム20に一端が連結固定され、他端が管用軸受け72に固定されると共に、ケーブル80が配線される低速回転管70とを備えたものである。  (もっと読む)
(もっと読む)
多関節機構ならびにロボットハンド
【課題】耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供。
【解決手段】直列配置される複数のフレーム3a〜3cと、各フレーム3a〜3cをそれぞれ傾動可能に連結する複数の関節4a〜4cと、前記適宜のフレームを傾動させるための動力を発生する駆動部5bと、この駆動部5bで発生する動力を前記適宜の関節に伝達する動力伝達部7とを含み、動力伝達部7において前記各関節間での動力伝達要素をギアで構成している。
(もっと読む)
溶接ロボット
【課題】円筒材の溶接において、多間接ロボットの各々の間接を同時に動かして、溶接トーチの先端の速度および軌跡の制御を行う必要がなく、また、ポジショナーを使用することもなく、高速で高精度の円筒溶接を行う溶接ロボットを提供すること。
【解決手段】円筒材と円筒材との溶接または円筒材と平板との溶接を行う溶接ロボットにおいて、溶接トーチと、マニピュレータの先端に回動自在に備えられ上記溶接トーチを直線移動自在に滑動的に移動させるリニアガイド機構とを備えた溶接ロボット。
(もっと読む)
歩行ロボット
【課題】 本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【解決手段】 この発明に係る歩行ロボットは、その脚部に回動可能な関節部を備え、関節部には関節軸201と、関節軸201を回動させるためのモータ205とを備えている。そして、脚部の床面への接地に連動して関節軸201の回動を規制する規制手段(プッシュロッド210、ロックピン212、213等)を備えている。
(もっと読む)
ロボット装置及びその制御方法、並びに受動車輪装置
【課題】 2足歩行ロボットの各可動脚に対し、駆動アクチュエータを持たない受動車輪機構を装備し、車輪の推進による高速且つ高効率の移動を実現する。
【解決手段】 足底ベース部をロール方向に回転することで、受動回動軸回りの回転を生じさせることにより、受動車輪を操舵し、脚をヨー方向に駆動することを容易にすることができる。これにより両脚支持状態であっても滑らかな操舵が可能となり、走行路面上で脚先を左右対称に蛇行運動させることで直進・旋回することが出来る。
(もっと読む)
手術支援装置
【課題】本発明は、各駆動部の負荷をより正確かつ速やかに操作器にフィードバックすることができ、操作性を向上させることができる手術支援装置を得ることを目的とするものである。
【解決手段】マニピュレータ3にマニピュレータ駆動機構が設けられている。マニピュレータ駆動機構21には、ダイレクトドライブ方式のスレーブ側モータ14が設けられている。操作器1の関節部には、ダイレクトドライブ方式のマスタ側モータ6が設けられている。操作器1は、マニピュレータ3からの力覚フィードバックを受けるように制御される。
(もっと読む)
81 - 100 / 102
[ Back to top ]