
Fターム[3C007KV18]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946) | 音響式(例;超音波式) (110)
Fターム[3C007KV18]に分類される特許
1 - 20 / 110
マスタ操作入力装置及びマスタスレーブマニピュレータ
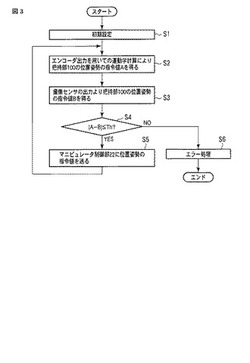
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
超音波センサー、触覚センサー、および把持装置

【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜15と、弾性膜15の内部に設けられ、弾性膜15が弾性変形すると、その変形に応じて位置が移動する超音波反射体16と、基板11上に設けられ、弾性膜15内に超音波を発信するとともに、超音波反射体16により反射された超音波を受信する複数の超音波素子20と、各超音波素子20の超音波の発信および受信を制御する制御部と、を備え、超音波反射体16は、超音波素子20に対向する素子対向面161を、複数の超音波素子20のそれぞれに対応して複数有する。
(もっと読む)
超音波センサー、触覚センサー、および把持装置
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
基板搬送ロボット
【課題】搬送ロボットを用いて、カセットに収容された液晶基板等の板状の基板を搬出する際に、基板検出センサを用いて基板の位置を検出していた。従来は、基板がカセットの手前側(入り口側)に寄せられてカセット内部に収容されていたが、基板がカセットの奥側に寄せられる場合があり、従来の搬送ロボットでは対応できない。
【解決手段】本発明の搬送ロボットは、ハンド4の先端付近に取り付けられた基板の有無を検出する基板検出センサ5と、ハンドの位置を移動させる移動機構11(アーム機構2等)と、ハンドの位置及び移動速度を制御する動作制御部12と、基板のエッジ位置を演算する基板エッジ位置解析部13とを備えた。上記構成にすると、基板がカセットの奥側に寄せられて収容された場合であっても、基板の位置を検出できる。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
サービス提供装置、サービス提供プログラム及びサービスロボット
【課題】サービス対象者を適切に選択することを課題とする。
【解決手段】サービス提供装置1は、移動情報取得部2と、干渉判定部3と、サービス対象者選択部4とを有する。移動情報取得部2は、自装置を基準として規定される第1の領域に存在する複数の人の移動方向及び移動速度を取得する。さらに、干渉判定部3は、移動情報取得部2によって取得された複数の人の移動方向及び移動速度からそれぞれ推定される人の移動推定軌跡が第1の領域よりも小さく、かつ自装置を基準として規定される第2の領域へ干渉するか否かを判定する。サービス対象者選択部4は、自装置がサービスを提供するサービス対象者として、干渉判定部3によって移動推定軌跡が第2の領域へ干渉すると判定された人を選択する。
(もっと読む)
ロボットアームの制御プログラム及び制御システム
【課題】ハンド部を適切な位置に停止させることができるロボットアームの制御プログラムを提供する。
【解決手段】本発明に係るロボットアームの制御プログラムは、ロボットアームのハンド部を、把持対象物に向かって移動させる処理と、ハンド部に設けられた距離測定部に、ハンド部と把持対象物との距離を測定させる処理と、距離測定部がハンド部と把持対象物との距離の測定が不能となると、測定不能となる直前のハンド部と把持対象物との距離と、ロボットアームの関節部の角度から算出させた、測定不能となった後のハンド部の移動距離と、に基づいて、ハンド部と把持対象物との距離を推定させる処理と、推定させたハンド部と把持対象物との距離が閾値以下となると、ハンド部を把持対象物に向かって移動させる動作を停止させる処理と、をコンピュータに実行させる。
(もっと読む)
センサ固定具
【課題】ロボット等に使用される複数個のセンサからなるセンサ装置において、複数個のセンサで形成される指向領域がつながるようにセンサを配置すること可能とするセンサ固定具を提供することを課題とする。
【解決手段】本発明のセンサ固定具は、複数のセンサを固定可能なセンサ固定具であって、複数のセンサをその上下から挟み固定する為の挟持部材と、センサと挟持部材とを固定する為の連結部材とを備え、挟持部材は挟持部を有し、該挟持部材の挟持部が、センサの被挟持部と対応な形状となっていることを特徴とする。
(もっと読む)
ロボット用ドライブレコーダ装置
【課題】 ロボットに係る情報を記録し、事故発生時における事故原因の究明に有効な情報を記録する「ロボット用ドライブレコーダ装置」を提供する。
【解決手段】 ロボット用ドライブレコーダ装置1は、自ロボットの稼動時の周辺環境を撮像するカメラ5、マイクロフォン6、ロボットセンサ4、各データを記録する記録装置9と、自ロボットに接近或いは接触する物体を検出しその検出結果から異常状態にあるか否かを判断するCPU2と、ネットワーク11を介して外部データベース12に通信可能な通信部10とを備え、CPU2が異常状態であると判断したときは、記録装置9に記録された各種データを通信部10によって外部データベース11に送信するものである。
(もっと読む)
制御システム、制御方法、操作制御装置及び作業装置
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
ロボットシステム及びその制御方法
【課題】操作性を向上させたロボットシステム及びその制御方法を提供すること。
【解決手段】ロボットシステム1は、所定空間内を移動可能なロボットアーム手段2と、所定空間内におけるロボットアーム手段2の現在位置を検出する現在位置検出手段と、所定空間内における、ロボットアーム手段2を移動させる目標位置を設定する目標位置設定手段53と、現在位置検出手段により検出された現在位置と、目標位置設定手段53により設定された目標位置と、の偏差δを算出する偏差算出手段52と、偏差算出手段52により算出された偏差δと、現在位置検出手段により検出された現在位置と、に基づいて、ロボットアーム手段2を目標位置へ移動させる制御を行う制御手段6と、を備えている。
(もっと読む)
自律移動装置における検出機能検査方法
【課題】比較的狭いスペースであっても、自律移動装置に搭載されている複数の検出手段の検査を行うことができ、検出手段の高精度な検査を容易且つ迅速に行うことができる自律移動装置における検出機能検査方法を提供する。
【解決手段】自律的に移動自在で複数の検出手段が搭載された自律移動装置Rを基準位置1に位置させて、基準位置1の自律移動装置1と被検出体Tとを所定距離を存して対峙させる位置合せ工程を行う。次いで、自律移動装置Rをその移動機構により基準位置1で自転させ、自律移動装置Rの向きを予め設定した複数の方向に順次向ける自転工程を行う。続いて、自律移動装置Rが向いた各方向毎で被検出体Tを検出させる検出処理工程を行う。そして、各検出手段毎に良否を判定する判定工程を行う。
(もっと読む)
ロボット及びロボットシステム
【課題】可動部の場所を短時間に検出できるロボットを提供する。
【解決手段】可動部を有するロボットであって、可動部に配置され超音波信号を発信する複数のロボット用超音波タグ13と、ロボット用超音波タグ13が発信した超音波信号を受信する3個以上のロボット用超音波受信装置19と、複数のロボット用超音波受信装置19が受信する超音波信号の到達時間を用いてロボット用超音波タグ13の場所を検出する発信位置演算部と、を有し、発信位置演算部は検出した複数のロボット用超音波タグにおける場所の情報から前記ロボットの姿勢を検出する。
(もっと読む)
移動体制御システムおよび移動体制御方法
【課題】移動体の現在位置を精度良く取得することができる移動体制御システムを提供する。
【解決手段】移動体制御システム1は、移動体100の測定向きを取得する方位取得手段104Aと、音波および電波の少なくともいずれかを発信する発信手段114Aと、移動体周辺の障害物までの測定距離を取得する距離取得手段106Aと、障害物の位置を示す地図データ57Aを格納する記憶手段57Sと、音波および電波の少なくともいずれかに基づいて、移動体100の測定位置を計算する第1の位置取得手段55Bと、測定位置と測定向きと測定距離と地図データとに基づいて、移動体の現在位置を計算する第2の位置取得手段とを備える。
(もっと読む)
ロボットアーム、ロボット及び制御方法
【課題】打楽器の演奏だけでなく他の作業も可能とするロボットアームを提供すること。
【解決手段】本発明の一態様に係るロボットアームは、動作部と、前記動作部が回動自在に連結された支持部と、前記動作部の回動運動を直線運動に変換して、移動部材に伝達する変換機構と、前記移動部材の移動距離を検出する距離センサと、前記距離センサで検出された前記移動部材の移動距離に基づいて、前記動作部の動作を制御する制御部とを備えるものである。
(もっと読む)
ロボット、ロボットハンド及びロボットハンドの制御方法
【課題】 把持しようとする物体の形状及び材質に関係なく、より迅速かつ正確に物体に接近し、安全に物体を把持することができるロボット、ロボットハンド及びロボットハンドの制御方法を提供する。
【解決手段】 手の平と、複数の節を備えて前記手の平に連結される複数の指とを備えるロボットハンドの制御方法において、前記手の平に設置される第1距離センサーを用いて前記手の平を物体に接近させ、前記複数の指に設置される第2距離センサーを用いて前記複数の指を前記物体に接近させ、前記手の平及び前記複数の指を前記物体に接触させて前記物体を把持するロボットハンドの制御方法を構成する。
(もっと読む)
自律動作型ロボット
【課題】ロボットの一部である動作部を検出した場合に、検出した動作部を障害物と誤認せずに自律動作を継続可能にするような自律動作型ロボットを提供すること。
【解決手段】外部の環境を観察して得られた情報に基づき検出信号を出力するセンサ部と、所定動作を行う動作部と、決定した動作を動作部行わせる制御部を備えた自律動作型ロボットにおいて、制御部が、動作部の動作を決定するとともに、センサ部からの検出信号に基づき決定動作を変更する動作決定部と、予め動作部に所定動作を行わせ、駆動開始時刻および駆動終了時刻の間にセンサ部からの検出信号の変化に基づき検出予測データを作成する検出予測データ作成部を備えており、動作決定部において検出予測データ作成部により作成された検出予測データに基づきセンサ部から出力された検出信号を無効にするか否かを判断する判断部をさらに設けるようにした。
(もっと読む)
移動ロボットの制御装置および移動ロボットシステム
【課題】外界センサにもとづく位置推定処理の遅れの影響を軽減し,目標位置への正確な位置決めを可能とし,多くの外界センサや位置推定処理アルゴリズムを利用可能であり,なおかつ追加コストのかからない移動ロボットの制御装置を提供する。
【解決手段】外界センサによる環境計測時の推定現在位置を記憶する計測推定位置記憶部を備え,記憶した環境計測時の推定現在位置と前周期の推定現在位置とを利用して外界センサにもとづく位置推定結果を補正する。
(もっと読む)
施設を整備するロボットと実時間または近実時間で相互作用する方法
本発明の態様によれば、整備ロボットとそのようなロボットを制御するための方法が提供される。詳細には、ロボットは、人の存在を検出し、人の存在の検出に応じて次の行動を取るように構成される。例えば、ロボットは、領域から出るか、人からの命令を待つか、人が出るまで遊休またはスリープ状態またはモードになる。 (もっと読む)
ロボットハンド
【課題】簡単な構成でありながら物体の硬さを検知することができる小型のロボットハンドを提供する。
【解決手段】第1の指部F1と第2の指部F2で物体Sを挟んだ状態で、第1の超音波アクチュエータU1の振動体3により超音波を発生し、第1の超音波アクチュエータU1の振動体3から固定子5及び回転子6、第1の指部F1、物体S、第2の指部F2、第2の超音波アクチュエータU2の回転子6及び固定子5を介して振動体3へと超音波が至る所要時間を計測する。指部F1及びF2の位置から物体Sの厚さDを算出して超音波の伝搬経路の長さを算出し、計測された所要時間と算出された超音波の伝搬経路の長さとに基づいて物体S中の超音波の伝搬速度を算出し、この伝搬速度V1に基づいて物体Sの硬さを検知する。
(もっと読む)
1 - 20 / 110
[ Back to top ]