
Fターム[3C007KX12]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 脚に設けるもの (125) | 足(足首より先)に設けるもの (86)
Fターム[3C007KX12]に分類される特許
1 - 20 / 86
脚式ロボット、その制御方法、及び制御プログラム
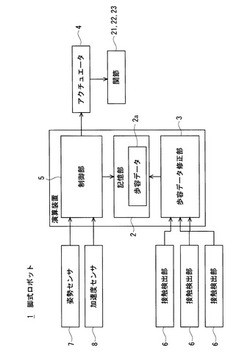
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
脚式ロボット
【課題】手部の指部の把持面が4足歩行時に損傷するのを回避し、4足歩行時に圧覚センサを用いた制御によってロボット本体の姿勢の安定性の向上を図る。
【解決手段】4つの肢部をもつ脚式ロボットの上肢部に設けられた手部209,212を用いて、ナックル歩行により安定な4足歩行を行う。右手部209には、2本の指部101a,102aの指背面125a,126aに接地検出用の手部圧覚センサ107a,112aが設けられている。また、左手部212には、2本の指部101b,102bの指背面125b,126bに接地検出用の手部圧覚センサ107b,112bが設けられている。これら手部圧覚センサ107a,112a,107b,112bを用いてナックル歩行時の姿勢が制御される。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれを低減するように実際の該ロボットに作用させる床反力を操作することが過剰に制限されるのを防止し、該床反力の操作によって該姿勢のずれを低減することの効果を高める。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、ロボット1の複数の脚体2が着床状態となる期間内において方形状と異なる形状の領域に設定した存在許容領域を逸脱する場合に、全床反力中心点が存在許容領域のうちの制限前補償ZMPに最も近い位置(制限後補償ZMP)になるように、実際の床反力の目標を決定する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの実際の姿勢と目標とする姿勢とのずれの低減に寄与しない床反力成分が発生するのを極力防止するように床反力を操作する。
【解決手段】脚式移動ロボット1の実際の姿勢と目標とする姿勢とのずれの程度を表す姿勢状態量偏差を“0”に近づける機能するフィードバック操作量としての実ロボット外力操作量に応じて床反力を操作したと仮定した場合の全床反力中心点(制限前補償ZMP)が、存在許容領域を逸脱する場合に、実ロボット外力操作量が“0”であると仮定した場合の全床反力中心点の目標位置(目標ZMP)と制限前補償ZMPとを結ぶ線分と、存在許容領域の境界線との交点が、全床反力中心点(制限後補償ZMP)となるように、実際の床反力の目標を決定する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】脚式移動ロボットの運動中に、複数の必要条件を満足させることが可能となる各脚体の先端部の運動軌道を効率よく決定しつつ、前記複数の必要条件を満足させる目標歩容を生成する。
【解決手段】脚式移動ロボット1の脚体2のうちの遊脚の先端部(足平22)の目標着地位置の第1着地許容領域と第2着地許容領域とを決定し、これらの着地許容領域が重なり合う領域に目標着地位置を決定し、ロボットの目標歩容を生成する。第1着地許容領域は、幾何学的脚体運動必要条件を満足するように決定される。第2着地許容領域は、床反力の構成要素である所定の床反力要素に係わる運動系属性必要条件と床反力要素許容範囲条件とを満足させ得るように決定される。
(もっと読む)
2足移動ロボットの制御装置
【課題】各脚体の離床・着床動作を2つの脚体で交互に行なう動作によって、2足移動ロボットの継続的な運動を行なうことが困難となる状況でも、該ロボットの継続的な運動を行ない得るようにすることを可能とする。
【解決手段】2足移動ロボット1の動作モードは、両脚交互離床・着床動作モードと片脚ホッピング動作モードとを有する。両脚交互離床・着床動作モードでの動作中に、該動作モードでのロボット1の運動を継続させる目標歩容を生成可能であるか否かを判断する(S040)。この判断結果が否定的となる場合に、動作モードを片脚ホッピング動作モードに変更することによってロボット1の運動を継続させる目標歩容を生成可能であるか否かを判断し(S041)、この判断結果が肯定的となる場合に動作モードを片脚ホッピング動作モードに変更して、目標歩容を生成する。
(もっと読む)
2足移動ロボットの制御装置及び歩容生成装置
【課題】2足移動ロボットに片脚ホッピング動作を行なわせるときに、離床・着床動作を行なう脚体の基端部の関節に大きなモーメントが作用するのを防止する。
【解決手段】片脚ホッピング動作を2足移動ロボット1に行わせるとき、離床・着床動作を行なう脚体2(支持脚側脚体2)の離床後の着床状態において、支持脚側脚体2の基端部よりも、支持脚側脚体2と異なる脚体2(遊脚側脚体2)の基端部の方が相対的に高い位置に存在するように、ロボット1の目標運動(上体24の目標姿勢)を生成する。
(もっと読む)
歩行支援装置
【課題】ユーザに違和感を与えることなく歩行動作を歩行支援装置を提供する。
【解決手段】歩行支援装置100は、ユーザの下肢に装着される下肢リンク12、足に装着される足リンク20を備える。足リンク20はジョイント14によって下肢リンク12に揺動可能に連結されている。足リンク20は、モータ16によって揺動する。モータ16はコントローラ10によって制御される。足リンク20には、足が接地しているか否かを検知する接地センサ22が備えられている。コントローラ10は、接地センサ22の出力に基づいて脚が遊脚期間にあるか立脚期間にあるかを判定する。そして、コントローラ10は、立脚期間には出力トルクが目標トルクに一致するようにモータ16をトルク制御する。他方コントローラ10は、遊脚期間には足リンク20の揺動角度が目標角度に一致するようにモータ16を角度制御する。
(もっと読む)
脚式移動ロボット
【課題】遊脚の着地可能範囲を広くすることが可能な脚式移動ロボットを提供する。
【解決手段】ロボット1は、上体4、及び、上体4と上腿リンク30R(L),32R(L)を連結する股関節と、上腿リンク30R(L),32R(L)と下腿リンク34R(L)を連結する膝関節と、下腿リンク34R(L)と足平22R(L)を連結する足首関節とを有し、左右対称の脚体2R(L)を備え、各脚体2R(L)を駆動して移動する。股関節はヨー方向に回転する股関節ヨー軸部10R(L)を有し、ロボット1が直進するとき、支持脚となる脚体2R(L)の上腿リンク30R(L),32R(L)が上体4に対して前方斜め外側を向くように、股関節ヨー軸部10R(L)において上体4に対する第1上腿リンク30R(L)のヨー方向の回転角が設定される。
(もっと読む)
2脚歩行ロボット
【課題】路面に対して足平が予定外に傾いた際に、歩行安定性を確保しつつ足平の傾きを抑える2脚歩行ロボットを実現する。
【解決手段】2脚歩行ロボットは、足平から路面までの距離を計測する距離センサを備えている。各脚関節を制御するコントローラは、次の処理を実行する。重心加速度算出ステップ:距離センサによって予定外に足平が路面に対して傾いたことを検知したときに、そのときの重心の加速度を算出する、重心軌道決定ステップ:算出した重心の加速度を初期値とし、所定期間の終端で予め定められた速度を有することを終端条件としてZMP方程式を解いて重心の軌道を算出する、及び、関節目標角算出ステップ:算出された重心の軌道から脚関節の目標角の時系列データを算出する。そしてコントローラは、関節目標角算出ステップで算出された目標角の時系列データに追従するように各脚関節を制御する。
(もっと読む)
ロボットの制御装置
【課題】力制御によってロボットの動作制御を行う場合に、ロボットの関節の動きの柔軟性を高めつつ、各関節に付与する駆動力をロボットに所望の動作を行なせる上で適切な駆動力に制御する。
【解決手段】基本パラメータ群M,N,G、ヤコビアンJc,Js、ロボット1の接触部位の運動を代表する接触部位代表要素の運動加速度の目標値↑Cと、一般化変数観測情報と、所定種類の状態量の1階微分値の目標値↑S'とを用いて、次式01の関係を満足する目標一般化力ベクトルτcmdのうちの各関節の変位量に対応する成分値を関節に付与する目標駆動力として決定し、この目標駆動力に応じてロボット1のアクチュエータの動作制御を行う。
S'+(Js*M-1*Tc−Js')*q'
=(Js*M-1*Pc)*(τcmd−τcmpn) ……式01
(もっと読む)
人間型ロボット及びその歩行制御方法
【課題】 関節トルクのサーボ制御に基づいて安定的な歩行を具現する人間型ロボット及びその歩行制御方法を開示する。
【解決手段】 人間型ロボットは、センサの測定値で関節位置軌跡補正値と関節トルク補正値をそれぞれ計算し、計算された各補正値を用いて関節位置軌跡と関節トルクを補正し、補正された関節トルクによって関節に設置されたモータを駆動することができる。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの実際の姿勢の目標姿勢からのずれを素早く補償し得るように目標運動を逐次決定しつつ、ロボットの運動を適切な目標運動に制御する。
【解決手段】第1動力学モデルを用いてロボット1の第1運動の瞬時値を逐次決定する第1運動決定手段100と、第2動力学モデルを用いてロボット1の第2運動の瞬時値を逐次決定する第2運動決定手段120とを備え、第1運動と第2運動とを合成することによりロボット1の目標運動を逐次決定する。ロボット1の実際の姿勢と目標姿勢とのずれを“0”に近づける機能を有するフィードバック操作量の低周波成分、高周波成分をそれぞれ第1運動決定手段100、第2運動決定手段120にフィードバックする。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの移動経路周辺に存在する所定種類の段差部を適切に回避し得る目標運動を生成しつつ、ロボットの動作制御を行う。
【解決手段】目標運動決定手段100は、ロボット1の移動環境の床形状情報とロボット1の移動経路に関する要求とに基づき、ロボット1の脚体2の先端部の運動の軌道を規定する脚体運動パラメータを決定しつつ、ロボット1の目標運動を逐次決定する。目標運動決定手段100に床形状情報を出力する床形状情報出力手段114は、所定種類の段差部DFの起立面を実際の起立面よりも緩斜面に整形してなる床形状情報を出力する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの実際の姿勢と目標とする姿勢とのずれを低減することと、ロボットの継続的な動作を行なうこととを適切に実現し得る目標運動を生成しつつ、ロボットの動作制御を行なう。
【解決手段】ロボット1の姿勢のずれのを低減するためのフィードバック操作量としてのモデル外力操作量の将来予測値の時系列を生成する手段114を備える。目標運動決定手段100は、モデル外力操作量の将来予測値の時系列により規定される付加的外力の時系列を動力学モデル上でのロボットに付加的に作用させたと仮定した場合のロボットの運動が将来において到達目標に到達又は収束するように、目標運動の瞬時値を逐次決定する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】歩容の制限や関節を駆動するアクチュエータの負荷を緩和することが可能な脚式移動ロボットの制御装置を提供する。
【解決手段】脚式移動ロボットの足平22R(L)は、前後方向に対して交差する鉛直面において曲率が連続する曲底面27R(L)を底部外周面に有する。足平22R(L)の着床から離床までに至る過程において、その足平22R(L)を曲底面27R(L)が接床する方向の軸回りに回転動作させることが可能である。
(もっと読む)
移動体の制御装置
【課題】基体の上下動運動を行いながら移動する移動体において、オーバーシュートやアンダーシュートの発生を抑制しつつ、基体の目標姿勢に対する実際の姿勢のずれを円滑に解消する。
【解決手段】基体24の姿勢に関する状態量偏差Δθを“0”に収束させるための要求操作量を決定するとき、移動体1又は基体24の現在時刻での目標慣性力の瞬時値と状態量偏差Δθの観測値とに応じて変化する慣性力依存性操作量成分と、該目標慣性力に依存せずに前記状態量偏差の観測値に応じて変化する慣性力非依存性操作量成分とを合成してなる値を要求操作量として決定する。
(もっと読む)
ロボット、2足歩行ロボット及びこれらの制御方法
【課題】ガタの存在により姿勢が不安定になることを解消可能なロボットを提供する。
【解決手段】2足歩行ロボット1は、大腿リンク6と下腿リンク8とは膝関節部7を介して連結され、大腿リンク6に対して下腿リンク8を揺動駆動する直動アクチュエータ11と、下腿リンク8の動作に減衰力を付与するMRダンパー12を備える。直動アクチュエータ11による下腿リンク8の揺動動作中に、下腿リンク8に作用する力の方向が変わるとき、MRダンパー12に減衰力を発生させる。
(もっと読む)
移動体の制御装置
【課題】基体の上下動運動を行いながら移動する移動体において、オーバーシュートやアンダーシュートの発生を抑制しつつ、基体の目標姿勢に対する実際の姿勢のずれを円滑に解消する。
【解決手段】基体24の姿勢に関する状態量偏差Δθを“0”に収束させるようにフィードバック制御則により要求操作量を決定するとき、フィードバック制御則のフィードバックゲインを、移動体1又は基体24の目標慣性力の時系列のうちの現在時刻から将来の所定時刻までの期間内の時系列を用いて決定し、その決定したフィードバックゲインと状態量偏差の観測値とからフィードバック制御則の演算により要求操作量を決定する。
(もっと読む)
1 - 20 / 86
[ Back to top ]