
Fターム[3C007LU05]の内容
マニピュレータ、ロボット (46,145) | 速度、力、ハイブリッド制御 (451) | 速度制御 (170) | 速度の補正 (16)
Fターム[3C007LU05]に分類される特許
1 - 16 / 16
ロボット制御装置
【課題】モーターの性能をより多く引き出すことが可能なロボット制御装置。
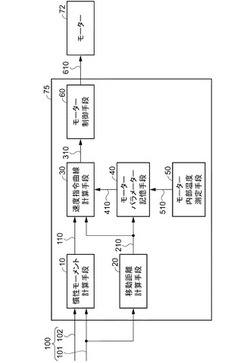
【解決手段】モーターパラメーター記憶手段40と、慣性モーメント計算手段10と、移動距離計算手段20と、速度指令曲線計算手段30と、速度指令曲線計算手段30により生成された速度指令曲線に従ってモーター72を制御するモーター制御装置60と、を備えるロボット制御装置75であって、モーター72の内部温度を測定するモーター温度測定手段50をさらに備えており、モーターパラメーター記憶手段40は、内部温度によって変動する可変パラメーターについては許容最大値よりも低い内部温度下で使用された場合の増大する方向に補正されたモーターパラメーターを含めて記憶しており、速度指令曲線計算手段30は、補正されたモーターパラメーターを用いて速度指令曲線310を生成するロボット制御装置75。
(もっと読む)
ロボット制御装置

【課題】特異点近傍のような関節角速度が急変するような領域を通過する場合であってもロボットを安定して動作させることができるロボット制御装置を提供する。
【解決手段】検出部102により検出された関節角度から関節角加速度を算出することにより実行後の複数の制御周期における関節角加速度を算出し、実行後の複数の制御周期における関節角加速度から、実行前の制御周期における関節角速度を予測する関節角速度予測部115と、実行前の制御周期における関節角速度が最大速度を超えるか判定する速度判定部113と、実行前の制御周期における関節角速度が最大速度を超えると判定された場合、実行前の制御周期における関節角速度から、実行前の制御周期における抑制関節角速度を算出する抑制速度算出部114とを備える。
(もっと読む)
ロボットの動作制御装置及びその動作制御方法
【課題】ロボットのの動的精度を向上させ、ティーチングに要する時間を短縮する
【解決手段】ロボット2の動作を制御する制御装置3は、軸毎に指令値に対する目標軌跡と実際の動作軌跡との差をサーボ遅れ時間として計算し、その計算した軸毎のサーボ遅れ時間を比較して軸毎のサーボ遅れ時間が複数の軸の全てで一致するように基準時間を決定し、その計算した軸毎のサーボ遅れ時間と当該決定した基準時間とに基づいて軸毎の補償トルクを計算し、その計算した軸毎の補償トルクを反映した指令値を各サーボに出力してロボット2の動作を制御する。
(もっと読む)
移動ロボットの姿勢制御装置及び方法
【課題】移動ロボットにおいて、狭い通路や場所での旋回性を確保しつつ、高速走行時の転倒に対する安定性を高めることができる移動ロボットの姿勢制御装置及び方法を提供する。
【解決手段】移動ロボット1の走行速度が相対的に遅い場合にはホイールベースWBを相対的に狭くし、走行速度が相対的に速い場合にホイールベースWBを相対的に広くする。また、移動ロボット1の重心位置をホイールベースWBの中央に置く。
(もっと読む)
ロボット制御装置
【課題】装着物に加わる外力又はトルクを許容範囲内とし、動作時間の延長を防止する。
【解決手段】ロボット制御装置2は、動作開始時の各関節12の位置と、動作終了後の各関節の位置と、予め指定された各関節の動作速度と、各関節における許容トルク又は許容加速度と、に基づいて各関節の動作開始から動作終了までの速度カーブを計算する速度カーブ算出手段21と、速度カーブ算出手段により算出された速度カーブに基づいて、アームに取り付けられる装着物18(15,16,17)にかかる外力又はトルクを算出する負荷算出手段23と、装着物の許容外力又は許容トルクに対する負荷算出手段により算出された装着物にかかる外力又はトルクの比率を算出する比率算出手段24と、算出された比率が1を超えた場合に、速度カーブの算出に用いられる動作速度および動作加速度に当該比率の逆数を乗じて速度カーブを補正する補正手段25と、を備える。
(もっと読む)
ロボットアーム、及びその制御方法
【課題】目標位置までの駆動時間を短縮することができるロボットアーム、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかるロボットアームは、複数の関節を駆動して、手先を目標位置まで移動させるロボットアームであって、手先軌道を生成する手先軌道生成部と、手先軌道にしたがって移動するときの手先速度を演算する手先速度演算部33と、手先速度に基づいて、関節の駆動速度を算出する駆動速度算出部34と、関節の駆動速度が駆動速度の限界値を越えているか否かを評価する駆動速度評価部35と、駆動速度が限界値を越えている場合に、手先速度を修正する手先速度修正部と、修正された手先速度に基づいて算出された駆動速度に応じて、関節を駆動するアクチュエータ28と、を備えるものである。
(もっと読む)
フロッグレッグアームロボット及びその制御方法
【課題】機構を複雑化させることなく制御上の特異点を通過する。
【解決手段】アーム部2が現在の姿勢から上記駆動モータ5の駆動により、所望の姿勢を含む複数の姿勢に移行可能な姿勢である特異点姿勢を通過する際に、ハンド部3を減速させる制御手段4を備える。
(もっと読む)
ロボット制御装置
【課題】 コンベア等の搬送装置におけるロボットの作業対象物の移動量の変化が大きくても高速高精度な追従作業を実行可能なロボット制御装置を得る。
【解決手段】 ロボット制御装置において、搬送装置位置検出部と、搬送装置位置生成部と、搬送装置位置生成部で得られたロボットの指令値を生成する搬送装置移動量生成部と、ロボットの搬送装置に対する追従誤差を記憶しておく追従誤差記憶部と、ロボットの追従遅れを補正する追従遅れ補正量を求め、追従遅れ補正量と追従誤差記憶部に記憶された追従誤差より追従目標移動量を生成する追従遅れ補正部と、追従遅れ補正部で生成された追従目標移動量から次制御周期の追従移動量を生成する追従移動量生成部とを備えるようにした。
(もっと読む)
ロボット制御装置
【課題】作業者が教示点の位置・姿勢を修正するための手動操作を行う際に、安価かつ簡単な構成で、位置・姿勢情報を修正することができるとともに、作業者への負担を軽減することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボット制御装置3は、教示点の位置・姿勢を修正するための手動操作によるロボット4の動作速度を制御する動作速度制御部8と、手動操作に従って、ロボット4の動作を制御する動作制御部6とを備えている。動作速度制御部8は、ロボット本体のリンク上および作業ツール上に予め設定された特徴点と、特徴点の位置座標を表現するために設定された基準点との接近距離を算出するとともに、接近距離に基づいて、動作速度を決定する。動作制御部6は、決定された動作速度により、ロボット4を動作させる。
(もっと読む)
脚式移動ロボットの制御装置
【課題】会社などの来訪者に合わせた案内動作を十分に実現して来訪者とのコミュニケーションを高めるようにした脚式移動ロボットの制御装置を提供する。
【解決手段】ロボットの移動環境において所定距離内に来訪者(案内相手)が存在するか否か識別し(S12)、来訪者が識別されたとき(S14)、脚部アクチュエータなどの動作を制御し、移動環境において識別された来訪者を目的地まで地図に従って案内する(S16からS44)。
(もっと読む)
作業補助装置
【課題】回転するワークに対して作業者がツールを使用する作業を行う場合に、ツール位置とワーク回転中心との距離に関わらず作業をし易くする作業補助装置を提供する。
【解決手段】コントローラ22aは、塗布器具32(ツール)の位置Pからワーク回転器24の回転軸線Cにおろした垂線Rの長さを算出する。コントローラ22aは垂線Rの長さが長くなるほどフロントガラス30(ワーク)の角速度ωが小さくなるようにモータ28の角速度を制御する。塗布器具32がフロントガラス30の回転軸線Cよりも遠く離れた位置にあっても、塗布器具32とフロントガラス30との相対速度が大きくなることを抑制することができる。塗布器具32と回転軸線Cと距離が変化しても塗布器具32とフロントガラス30との相対速度が大きく変化しないのでフロントガラス30に対して塗布器具32を使用する作業をし易く補助することができる。
(もっと読む)
ロボットの制御装置
【課題】 種々の負荷イナーシャに対応可能なロボットの制御装置を提供する。
【解決手段】 サーボモータ16によって駆動される複数の関節13を備え、アーム先端14に装着されるツール15を交換可能な多関節ロボット10の制御装置20において、アーム先端に装着されるツールの負荷イナーシャの値に応じて、少なくとも最もアーム先端側となる関節における、少なくともモータ軸の角速度、トルク又はツールの荷搬重量のいずれかの制限値を設定する第一の制限設定手段と、多関節ロボットに対して制限値の範囲内で動作するように制御する動作制御手段とを備える、という構成を採っている。
(もっと読む)
ロボットの制御装置および制御方法
【課題】ロボットに対する指令速度が低速度であっても一部の関節軸の回転速度が最高速度付近まで上昇するといった問題点を解消するとともに、ロボットが速度過大となることなく、あるいは停止することなく特異点および特異点近傍を通過させること。
【解決手段】特異点近傍を含む特異点領域に進入するロボットを制御する特異点処理機能を有するロボットの制御装置において、補間処理部1は、速度指令に基づいて位置指令を生成出力する補間位置生成部12と、位置指令に基づく関節データを生成出力する座標変換部13と、位置指令と関節データと特異点領域情報14aとに基づいてロボットが特異点領域に進入したか否かを判定する進入判断部14と、進入判断部14の判定結果に基づいて起動され、特異点領域に進入したロボットが特異点領域を通過する際の位置指令を生成出力する特異点通過位置指令生成部20dを具備する特異点通過位置生成部20とを備える。
(もっと読む)
ロボット制御装置および制御方法
【課題】 衝撃や振動を抑えるとともに、タクトタイムが増加しない、直交座標系での精度が低下しない、指令速度を守るというような用途に合った動きを実現することができるロボット制御装置を提供する。
【解決手段】 作業指令から直交座標系運動指令を生成して、電動機へのトルク指令を生成するロボット制御装置において、制御シミュレーションを行うシミュレーション演算部と、前記シミュレーション演算部にて演算された内部の状態量を評価する状態量評価部と、前記状態量評価部にて評価された結果に基づき速度や加減速時間などの運動指令生成のためのパラメータを調整するパラメータ調整部とを備える。
(もっと読む)
運動体の制御システム
【課題】モータの作動を制御するための制御ユニットの通信に一時的に異常が生じた場合でも、モータ及びこれを動力源とするロボット等の運動体の挙動を適切に制御し得るシステムを提供する。
【解決手段】本発明の制御システムによれば、変数測定部101が、2次目標角度θ2T、すなわち、第1副制御ユニット121が記憶保持している最新の1次目標出力θ1Tの変化量を変数δとして測定する。また、判定部102が、変数δの絶対値が閾値εを超えたか否かを判定する。さらに補正部103が、判定部102により変数δの絶対値が閾値εを超えたと判定された場合、モータ電流Iを、当該モータ電流Iの変化量が抑制されるように補正する。これにより、主制御ユニット110と第1副制御ユニット121との第1通信線を介した通信に一時的に異常が生じて変数δの絶対値が閾値εを超えた場合でも、モータ131への供給電流Iの急激な変化が抑制される。
(もっと読む)
ロボット
本発明は、例えば家の中など障害物がある環境で自由に動き回わるのに適した構造を有するロボットを提供することを目的とし、カメラで得られた画像を基地局に無線で送信することにより、その画像を、基地局を介して、その基地局との間で無線通信を行なう通信端末に送信するとともに、その通信端末の操作によりその画像上に指定された移動目標位置情報を基地局を介して無線で受信する通信部と、その通信部で得られた移動目標位置情報により特定される移動目標位置までロボットを移動させる動作制御部とを備えた。  (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]