
Fターム[3C007LV08]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | エンドエフェクターの制御 (521) | 把持の制御 (337) | 把持の安定性の判断を行うもの (23)
Fターム[3C007LV08]に分類される特許
1 - 20 / 23
超音波センサー、触覚センサー、および把持装置
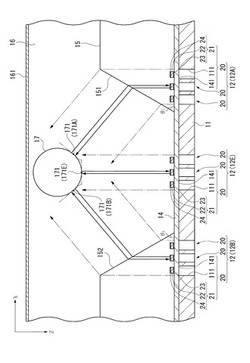
【課題】簡単な構成で、接触物の接触検出が可能な触覚センサー、および把持装置を提供する。
【解決手段】触覚センサーは、基板11と、基板11上に設けられ、接触物の接触により弾性変形可能な弾性膜16と、弾性膜16の内部に設けられ、弾性膜16が弾性変形すると、その変形に応じて位置が移動する超音波反射体17と、複数の超音波素子20をアレイ状に配列したアレイ構造を有し、基板11の表面に対して直交する方向に平面波として伝搬する超音波を発信する超音波アレイ12と、基板11上に設けられ、超音波アレイ12から発信された超音波を、超音波反射体17に向かう方向に屈折させる音響レンズ15と、各超音波アレイ12の超音波の発信および受信を制御する制御部と、を備えた。
(もっと読む)
ロボット

【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を対象物が載置された載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ロボットの把持制御システム及びロボット
【課題】把持の成否の判定基準を、物体やタスクに応じて適切な基準となるように柔軟に変更可能とすること。
【解決手段】本発明に係るロボット10の把持制御システムは、物体と、その物体に応じた目標把持状態を含む把持方法情報とが対応付けて記憶された把持方法DB30と、把持方法DB30に記憶された把持方法情報に従って物体をハンドにより把持させる際に当該把持の成否の判定に利用する判定基準情報で、目標把持状態に対するセンサ11で検出される把持状態の一致度に関する判定基準情報が、物体と対応付けて記憶された把持判定基準DB40と、把持判定基準DB40を参照して、指令される物体に応じた判定基準情報を取得して把持判定基準情報として決定する把持判定基準決定器60と、一致度が、決定された把持判定基準情報に基づいて把持の成否を判定する把持成否判定器70と、を備える。
(もっと読む)
ロボットハンド
【課題】所望位置で把持対象物を把持可能なロボットハンドを提供する。
【解決手段】把持対象物であるティッシュボックスQや紙コップTを把持する指部81を備えた把持部99は、以下のように構成されている。即ち、指部81のリンク84の把持面84aの所望位置に、把持面84aから突出する突起部84eを設けた。突起部84eは、指部81のリンク84の把持面84aの略中央に形成されている。突起部84eは、シリコンゴムなどの弾性体によって形成されている。突起部84eは、シリコンゴム、ウレタンゴム、又は、クロロプレンゴムによって形成されている。把持面84aには、荷重位置を検出可能な接触抵抗式面センサ84bが設けられている。
(もっと読む)
把持判別装置および把持判別方法
【課題】把持対象である物体が把持可能であるか否かを正確に判定することが可能な把持判別装置を提供する。
【解決手段】本発明の把持判別装置は、把持対象である物体を把持部によって把持した状態で、把持部を移動させる目標軌道を生成する計画部と、目標軌道に基づいて駆動された把持部の動きを計測する観測部と、目標軌道から導出される把持部の目標値および観測部により計測された実測値に基づいて、把持対象である物体が把持可能であるか否かを判別する把持状態判別部と、把持状態判別部による判別結果に基づいて、把持部の把持する物体の把持状態を変更する把持状態変更部と、を備える。
(もっと読む)
ロボットハンド
【課題】付加ビジョンセンサが不要でコンパクトであり、暗闇の中でもすべりによる落下することなく、把持することができるロボットハンドを提供する。
【解決手段】指部を屈曲させることで物体を把持するロボットハンドであって、手掌部または指部に設けられた接触検出手段と、検出結果に応じて駆動部を制御する手段を有し、検出手段は、物体に光を照射する光源と、物体の光が照射された部位の画像情報を取り込むべく光を集光するレンズを具備したイメージセンサと、上記レンズの焦点を変化させるレンズ移動機構と、取り込んだ画像情報の差分に基づいて、物体の相対的な移動量を演算する演算手段と、を有し、レンズの焦点と物体の位置との一致・不一致を判断して手掌部または指部と物体との接触を検出するとともに物体の外形形状を検出し、かつ、物体表面の相対的な移動量を演算する手段と、を有して構成する。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
把持部を有するロボットハンドシステム
【課題】把持部を有するロボットハンドシステムにおいて、センサを複数必要とせずに、最小限の把持力で対象物を把持することを可能とすることである。
【解決手段】ロボットハンドシステム10のハードウェアの部分は、1つの昇降アクチュエータ12と、複数の把持アクチュエータ14と、複数の多関節部17の各先端の把持端部にそれぞれ設けられる探触子20を含んで構成される。探触子20に接続される接触・滑り度検出部50は、探触子20に対象物が全く接触していない非接触状態と、探触子20と対象物が相対的に移動していない接触把持状態と、探触子20と対象物が相対的に移動していわゆる滑っている滑り状態とを区別して検出する機能を有する。この機能を用いて、制御部70は、最小限の把持力で対象物を把持するように、把持アクチュエータ14を駆動する。
(もっと読む)
バラ積みピッキング装置におけるワークピッキング方法
【課題】ワーク同士の絡まりや把持不良等があっても正確に把持ミスを検出して効率的にリトライすることができ、ワーク把持目標位置に誤差が含まれる場合であっても、短時間にワークを把持することができ、これによりピッキング時間を短縮し、ピッキングの成功率と装置の稼働率を高めることができるバラ積みピッキング装置におけるワークピッキング方法を提供する。
【解決手段】ロボットハンド24をワーク把持目標位置へ前進させ(S3)、把持状態を確認し(S4)、把持状態が良好でない場合は、ワーク把持目標位置を変更して(S8)、把持状態となるまでロボットハンドを前進させる(S3)。また、前記把持状態が良好である場合に、ワークの取出しのためロボットハンド24を後退させ(S5)、再度把持状態を確認し(S6)、把持状態が良好でない場合は、ワーク把持目標位置を変更して(S8)、再度、ロボットハンドをワーク把持目標位置へ移動する(S3)。
(もっと読む)
マニピュレータの制御装置および制御方法
【課題】ハンドを先端に装着したアームの動作状態に応じて多指ハンドの指ごとに位置制御と力制御とを切り替え、物体の把持や搬送に適した多指ハンドの制御を行うことができる制御方法および装置を提供する。
【解決手段】先端部に各々力センサ18を設けた複数の指を備えた多指ハンドと、多指ハンドを先端に装着したアームとからなるマニピュレータの制御装置において、アーム制御部1は、多指ハンド制御部2に対しアームの動作状態としてアームの先端部の加速度、速度または移動距離の少なくとも1つと、アームの先端部の位置姿勢を出力し、多指ハンド制御部2は、指ごとに位置制御または力センサの出力に応じた力制御を行う指制御部51、52、53と、アームの動作状態に応じて指制御部51、52、53に対し力制御と位置制御の間で切り替えを指令する制御モード選択部4を備える。
(もっと読む)
把持装置
【課題】対象物を把持した際にその把持状態を正確に認識することができる把持装置を提供することを目的とする。
【解決手段】
少なくとも第一指11と第二指12を有し、この第一指11と第二指12により対象物Mを把持する把持部2を備えて構成される把持装置であって、第一指11及び第二指12の表面における圧力分布を検出し(S12)、取得された圧力分布と第一指11及び第二指12の表面の形状とに基づいて第一指11及び第二指12における対象物Mの把持状態を検出する(S22)。これにより、画像認識の精度が高くなくても、対象物の把持状態を正確に認識することができる。
(もっと読む)
超音波検査システム
【課題】正確なアライメントを必要とせず、検査物体の硬さや重さに関する情報を取得することができる超音波検査システムを供給する。
【解決手段】超音波送受波器1から広帯域変調波を検査対象物体11に送波し、検査対象物体11にラム波を励起する、ラム波3は円筒形状の検査対象物体11を円周方向に周回し、超音波受波器2によってラム波3周回周期に同期した周期性をもった受信信号が獲られる。これらの周期性を解析することによって、ラム波の伝搬速度が推定され、検査対象物体11の硬さ、重さなどが推定される。
(もっと読む)
ロボット、ならびにその制御方法および制御プログラム
【課題】ハンドによって物体を的確に把持できているか否かを自ら確認しうるロボット等を提供する。
【解決手段】カメラ102を通じて得られる画像に基づくハンドル(物体)Hの位置および姿勢(外部情報)と、ロータリーエンコーダ104の出力等に応じたロボット1の姿勢に基づく、ハンドルHが的確に把持されていると仮定した場合のハンドルHの位置および姿勢(内部情報)とが整合しているか否かが判定される。外部情報および内部情報が整合していると判定されたことに応じて、各ハンド13に設けられた6軸力センサ106によって検知される力に基づいてハンドルHの把持状態の良否が判定される。
(もっと読む)
ロボットハンドおよびロボット
【課題】補助的な指機構を用いることなく、複数の指機構から物体に作用する力を調節しながら、物体の持ち替えが可能なロボットハンド等を提供する。
【解決手段】ロボットハンド1によれば、複数の指機構11〜13のうち一部の指機構13から物体wに作用する力F3が変更されるとき、物体wにおける各指機構11〜13の「接点」ならびに各指機構11〜13から物体wへの「作用力ベクトル」が「安定把持条件」を満たすように各指機構の動作が制御される。「安定把持条件」は(1)複数の指機構11〜13から物体wに作用する力およびモーメントのそれぞれの和が0になり、かつ(2)スリップ指数frが最小になるという条件である。
(もっと読む)
滑り検出装置、滑り検出方法、及びロボットハンド装置
【課題】簡易な構成で、把持部における滑りを高精度に検出すること。
【解決手段】滑り検出装置1は、対象物体と対象物体を把持する把持部との接触面7aの滑りを検出する。また、滑り検出装置1は、接触面の圧力分布を算出する圧力分布算出手段5aと、圧力分布算出手段5aにより算出された圧力分布に基づいて、圧力分布の中心位置を算出する中心位置算出手段5bと、中心位置算出手段5bにより算出された接触面の中心位置の移動速度を算出する移動速度算出手段5cと、移動速度算出手段5cにより算出された中心位置の移動速度を含む滑り判定関数の値に基づいて、接触面に滑りが発生しているか否かを判定する滑り判定手段5dと、を備えている。
(もっと読む)
ロボットハンドの把持制御装置
【課題】 指部材によって物体を倒したり、損傷したりする危険性が低く、物体を確実に把持することができるロボットハンドの把持制御装置を提供する。
【解決手段】 ロボットハンドの把持制御装置は、画像認識装置によって把持対象物体の形状を認識し、把持対象物体の形状に基づいて、把持姿勢算出装置によって、ロボットハンドの把持姿勢を算出する。把持姿勢算出装置では、予め定義された複数のモデル形状と、モデル形状に対するロボットハンドの拘束条件から定めた接触条件を記憶しており、認識した把持対象物体Mの形状に対していずれかのモデル形状を割り当て、割り当てたモデル形状と、掌部16および第二指11〜第四指との接触条件を満たす把持姿勢を算出する。
(もっと読む)
ロボットハンド装置
【課題】 滑りの有無を効率的に判断できるロボットハンド装置を提供する。
【解決手段】 物体Wを把持する把持手段2と、該把持手段に設けられ前記物体との接触圧を複数点で検出する接触圧検出手段3と、前記接触圧検出手段の出力に基づいて前記把持手段による前記物体の把持力を制御する制御手段8と、前記把持手段を移動させる移動手段5とを備えて、前記物体を把持して移動させるロボットハンド装置1であって、前記制御手段8が、前記把持手段2の移動方向に基づいて、前記接触圧検出手段が検出する前記接触圧をスキャンする領域を限定する。物体Wが滑り出す領域の接触圧だけを監視するようにしているので、高周波の信号が接触圧検出手段から出力されても短時間で処理して、滑り発生の有無を効率良く判断できる。
(もっと読む)
1 - 20 / 23
[ Back to top ]