
Fターム[3C007LV14]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | プログラムの進行 (423) | 作業計画の決定 (79)
Fターム[3C007LV14]に分類される特許
1 - 20 / 79
自動作業装置
【課題】ワークの種別を自動的に判別する自動作業装置のコストを抑えること。
【解決手段】ワークを把持したか否かを検知するセンサを備えたロボットハンドへ作業対象となるワークを供給する供給容器に、ワークの種別を示す被把持部を予め設けておき、作業の開始前に、ロボットハンドによって供給容器の被把持部を把持させる模擬動作を行い、ロボットハンドによる被把持部の把持位置および把持結果に基づいてワークの種別を判別するように自動作業装置を構成する。
(もっと読む)
ロボット制御装置、ロボット制御方法、およびプログラム

【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
コミュニケーションロボット
【課題】人で混雑した環境にも適応できる多様なコミュニケーションを提供すること。
【解決手段】コミュニケーションロボット10は、密集度DBを含み、人と共存する様々な環境に配置されて様々なコミュニケーション行動を実行する。密集度DBには、環境を区分したエリアのそれぞれと対応付けて、当該エリアにおける密集度の許容値が記憶される。コミュニケーションロボット10は、コミュニケーション行動を実行する際には、自身の現在地を取得するとともに、その現在地が含まれるエリアの現在の密集度を取得する。そして、現在地が含まれるエリアの密集度が当該エリアに対応する許容値以上か否かを判断し、その判断結果に従って、コミュニケーション行動の実行を制御する。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
自動組立システムおよび自動組立方法
【課題】要求される組立精度より繰り返し位置精度が大きい場合であっても、自動で部品組付けを行う。
【解決手段】第2部品画像に基づいて、組付け部位の位置を認識する第2部品認識手段と、組付け部位の位置に第1部品51を移動させる部品移動手段と、部品移動手段により移動された第1部品51を第2部品52に組付ける組付実施手段と、組付けが成功したかを判断する組付判断手段と、組付けが失敗した場合に、突き当て画像に基づいて、第1部品51の位置を認識する第1部品認識手段と、組付け部位の位置および第1部品51の位置に基づいて、第1部品51に対する位置補正量を算出する補正量算出手段と、位置補正量に基づいて、第1部品51を移動させる部品位置補正手段とを備え、組付実施手段は、部品位置補正手段により移動された第1部品51を第2部品52に組付ける。
(もっと読む)
粗倣い制御を行うロボットの制御装置
【課題】形状が未知の部分や障害物等がワークに存在する場合でも、ロボット、作業ツール及びワークに対して過大な負荷をかけることなく、なるべくワークの形状に沿った迅速な倣い制御を可能とするロボット制御装置の提供。
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
(もっと読む)
ロボットアーム及びロボットアームの制御方法
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
物体把持装置、物体把持装置の制御方法、およびプログラム
【課題】ピッキング時の干渉によるワークの位置姿勢の変動の影響を低減することを目的とする。
【解決手段】複数のワークを含む領域の画像を撮像する撮像部と、複数のワークを含む領域の距離情報を取得する取得部と、画像と距離情報とに基づいて、複数のワークから複数の把持候補ワークの三次元位置姿勢を計測して三次元位置姿勢情報を生成する計測部と、計測部により計測された前記三次元位置姿勢情報に基づいて、把持候補ワークから把持対象ワークを選択する選択部と、把持対象ワークを把持する把持部と、把持部により把持対象ワークが把持されている間に、把持候補ワークの三次元位置姿勢を所定の時間間隔で計測して三次元位置姿勢情報を更新する更新部と、を備え、選択部は、把持部による把持が終了した場合、更新部により更新された把持候補ワークの前記三次元位置姿勢情報に基づいて、次の把持対象ワークを選択する。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法
【課題】ロードマップを用いて軌道計画を行う場合に、複雑な環境下でも指定されるタスクに応じた軌道計画を実現可能とし、かつ、軌道算出可能性を保証しつつ軌道計画に要する処理コストを低減可能とする。
【解決手段】ロボットの軌道計画システム20は、タスク種類と、初期姿勢と、最終姿勢と、に応じて構成された複数のノードがそれぞれ登録された複数のロードマップを記憶するロードマップ記憶部21と、入力されるタスク種類と、入力される初期姿勢及び最終姿勢と、から、対応するロードマップIDを特定するロードマップ選択器22と、周辺の環境情報を取得する環境情報取得器23と、ロードマップIDから対応するロードマップを特定して、入力される初期姿勢及び最終姿勢と、環境情報と、から、軌道を計画する軌道計画器24と、を備える。
(もっと読む)
ワーク取出し装置およびワーク取出し方法
【課題】ばら積みされたワークの取出し作業を効率的に行う。
【解決手段】ばら積みされた複数のワーク5を含むワーク積載領域のカメラ画像に基づいてワーク5を検出するワーク検出部8aと、ワーク検出部8aによる検出結果に基づいて、ロボット2により取り出されるワーク5を選定するワーク選定部8bと、ロボット2の動作によってワーク5の積載状態が変化したか否かを判定する積載状態判定部8cと、ワーク検出部8aによりワーク5を検出する際のワーク検出領域を設定する領域設定部8eとを備える。領域設定部8eは、積載状態判定部8cによりワーク5の積載状態が変化したと判定されると、その積載状態の変化位置の周辺領域であり、ワーク積載領域の一部にワーク検出領域を設定する。
(もっと読む)
給仕サービスのためのロボットシステム
【課題】複数台の移動型ロボットを合理的に運用して省エネルギのもとに質の高い給仕サービスを提供すること。
【解決手段】各移動型ロボット100の状態情報に基づいて移動型ロボット100が調理物引渡場所14に到着できる時刻を予測演算し、予測演算された各移動型ロボット100の到着時刻のうち最も到達時刻が早い一台の移動型ロボット100を選択して当該移動型ロボット100に調理物配達を実行させる処理を行う。
(もっと読む)
ロボット装置、ロボット装置の遠隔制御方法及びプログラム
【課題】遠隔操作が必要な自律ロボット装置に対して、ユーザーが容易に遠隔操作することが可能なロボット装置、ロボット装置の遠隔制御方法及びプログラムを提供する。
【解決手段】自装置又は外部環境の現在状況を把握し、現在状況に基づいて将来の行動計画を複数の行動計画候補のうちから一つの行動計画に決定する行動計画部と、決定された行動計画に基づいて、自装置を遠隔制御する遠隔制御装置に表示する表示内容を、予め用意しておいた複数の表示パターン候補のうち一つの表示パターンに決定し、決定された表示パターンを遠隔制御装置に表示させる表示制御部とを備える。
(もっと読む)
自律移動装置および作業決定方法
【課題】ユーザから提示された物体を認識し、当該物体を用いて実行する作業内容を決定することが可能な自律移動装置を提供する。
【解決手段】本発明の自律移動装置は、所定の作業を行うために動作する動作部と、ユーザからの指示に基づいて、実行する作業を決定する作業決定部と、作業決定部により決定された作業内容に基づいて、動作部の動きを制御する制御部と、を備える。作業決定部は、ユーザから提示された物体を識別するための物体情報を取得する情報取得部と、情報取得部により取得された物体情報に基づいて、物体を識別する物体識別部と、物体と、当該物体を使用して行う作業内容とを関連付けて記憶する作業記憶部と、物体識別部により識別された物体に基づいて、作業記憶部から識別された物体を用いて行う作業内容を決定する決定部と、を備える。
(もっと読む)
ロボット装置及びロボット装置による情報提供方法
【課題】認識されたユーザーに応じて周辺環境に関する情報を適切に提供することが可能なロボット装置及びロボット装置による情報提供方法を提供する。
【解決手段】移動部と、移動しながら外部の環境を認識する外部環境認識部と、環境に基づいて環境地図を生成する環境地図生成部と、情報提供する地点を環境地図内に指定する情報提供地点指定部と、情報提供の対象とする複数のユーザーを登録し、情報提供する地点毎に情報提供するユーザーを設定するユーザー管理部と、環境からユーザーを認識する人物認識部と、ユーザーの行動を認識する行動認識部と、ユーザーの行動に基づいてユーザーの将来の行動を予測する予測部と、情報提供する地点とユーザーの将来の行動との関係に基づいて情報提供する情報提供部とを備える。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】対象物の個々の行動予測の困難性に応じて移動体の動作を制御する。
【解決手段】制御装置100は、所定の制御パラメータに基づいて移動体の行動を制御する制御部114と、対象物の特徴情報と対象物に関する危険情報とを対応付けて記憶している記憶部104と、対象物の特徴情報を認識する認識部102と、認識部102により認識された対象物と移動体との距離を検出する検出部108と、検出部108による検出結果と対象物の特徴情報に対応する危険情報とから、制御パラメータを決定する決定部112と、を備える。
(もっと読む)
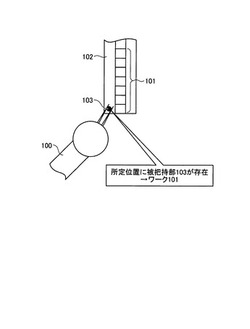
ロボットを用いた嵌合装置
【課題】嵌合方向への押付により十分なモーメントが検出できない状況下でも、ワークを傷付けずに嵌合作業が行える嵌合装置及び嵌合方法を提供する。
【解決手段】嵌合ワークW2を把持したロボット11により、該嵌合ワークを定位置に設置された被嵌合ワークW1に嵌合する嵌合装置10は、被嵌合ワークに対する嵌合ワークの嵌合が進行しているか否かを判断する嵌合進行判断部と、嵌合が進行していないと判断された場合に、嵌合ワークの現在の姿勢を変化させ、変化させている間に力測定部(14)により得られた嵌合方向の力、又は嵌合ワークの嵌合方向の速度に基づいて、嵌合ワークの適正姿勢を探索するワーク姿勢探索部と、探索された嵌合ワークの適正姿勢を用いて、嵌合ワークを把持したロボットに嵌合動作を継続させる嵌合動作指示部と、を備える。
(もっと読む)
問題解決システム、問題解決支援装置及び問題解決方法
【課題】知能発達システムに要求される性質を満たす実世界における一般問題解決システムを提供する。
【解決手段】 ロボットと問題解決支援手段とプランナとを備える。問題解決支援手段は、入力層とパターン記憶層とシンボル記憶層とを有し、記号接地フェーズでは、パターン情報の種類に応じた自己増殖型のニューラルネットワークを用いて概念情報が対応付けられたパターン情報を学習し、知識獲得フェーズでは、ロボット自身の行動の前後の実環境でそれぞれ取得したパターン情報から変化前後の環境モデルをそれぞれ取得して、前提条件と削除リストと追加リストとロボットの動作情報とを含むオペレータを生成し、問題解決フェーズでは、タスクの初期状態及び目標状態をプランナに入力してプランニングをし、プランナが出力するプラン中の動作情報に応じた動作をロボットに実行させる。
(もっと読む)
搬送装置
【課題】予め設定された搬送軌道を位置ズレに応じて補正するにあたり、補正前の搬送軌道の特性を損なうことなく、位置ズレに応じて搬送軌道を補正する新たな搬送装置を提供する。
【解決手段】搬送装置は、始点Sから終点Eまで搬送軌道Ptに沿って搬送対象物を搬送する装置であり、予め設定された搬送軌道Ptを用いて搬送制御を行うにあたり、目標となる終点E’が搬送軌道Ptの終点Eから位置ズレしている場合に搬送軌道Ptの終点Eが目標終点E’となるように搬送軌道Ptを補正する。軌道Ptを補正するにあたり、搬送装置は、補正前の終点Eと補正後の目標終点E’とのズレベクトルを、始点Sから目標終点E’の区間にわたり、按分して、搬送軌道を漸次的に補正し、補正後の軌道Pt’とする。
(もっと読む)
制御装置、ロボット、ロボットシステム及びロボットの追従制御方法
【課題】移動するワークに追従して作業する複数のロボットのワークに対する追従能力をそれぞれ高めることのできる制御装置、及びロボット、及びロボットシステム、及びロボットの追従制御方法を提供する。
【解決手段】ロボットコントローラー6は、コンベヤー1により搬送されるワークに対して追従動作を行なう順番を上流側及び下流側に配置されたロボット4,5にそれぞれ設定する。ロボットコントローラー6は、各ロボット4,5のロボットがそれぞれワークに対して追従動作を行なう追従領域を各ロボットの別に設定する追従領域設定部15と、各ロボット4,5がそれぞれワークに対して追従動作を行なう順番を決定する追従順番決定部12と、決定された各ロボットの追従動作を行なう順番を記憶する第1及び第2追従順番記憶部13a,13bとを備える。
(もっと読む)
ロボットアームの干渉回避方法
【課題】冗長性を有する多関節のロボットアームを各関節に干渉の起こらないような関節位置をとりうる全関節位置から算出し教示することなく、ロボットアームの干渉回避を行うことができるロボットアームの干渉回避方法を提供する。
【解決手段】ロボットアームを現在の姿勢から別の姿勢に移行させる際に、制御装置により予め冗長関節12,14,16の必要回転角度を演算し、この必要回転角度による各関節、各アーム及びハンドの移動予測点が進入禁止領域20に入らない場合には、前記必要回転角度を各関節の指示値として、別の姿勢にロボットアームを移行させ、移動予測点が進入禁止領域20に入る場合には、あらかじめ設定された回避動作を実行する。
(もっと読む)
1 - 20 / 79
[ Back to top ]