
Fターム[3C007LV23]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | サーボ制御 (103)
Fターム[3C007LV23]の下位に属するFターム
ゲイン調整を行うもの (42)
Fターム[3C007LV23]に分類される特許
1 - 20 / 61
ロボット及びロボットのノイズ除去方法
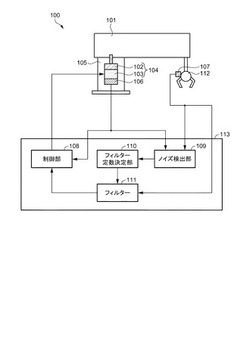
【課題】慣性センサーを用いたフィードバック系において、発振してしないロボットを提供する。
【解決手段】アーム101と、アームを回動させるモーター103とトルク伝達機構102とを含むアーム連結部104と、アーム101の端部のアーム連結部104に連結された基体105と、モーター103の回動角度を検出しモーター103の回動角度情報を出力する角度センサー106と、アーム101に作用する慣性力の情報を出力する慣性センサー107と、アーム101の回動動作を制御する制御部108と、角度センサー106の出力と慣性センサー107の出力とから慣性センサー107のノイズ周波数を検出するノイズ検出部109と、ノイズ検出部109の情報からフィルター111の特性を決めるフィルター定数決定部110と、フィルター定数決定部110に基づき慣性センサー107のノイズを除去するフィルター111とを備える。
(もっと読む)
ロボット制御装置

【課題】ロボットのハードウェア制限条件を考慮しながら、安定したビジュアルフィードバック制御を提供する。
【解決手段】カメラで撮影された画像から対象物の特徴を表す画像特徴量を算出する画像特徴量算出部105と、画像特徴量の変化と前記関節角の変化の割合である画像ヤコビアンを算出する画像ヤコビアン算出部107と、設定された目標値と前記画像特徴量とを用いて、ロボットの制御周期毎の画像上の目標軌道を生成する目標軌道生成部108とを備える。
(もっと読む)
ロボット制御装置
【課題】ロボットが一方の動作から他方の動作にスムースに移行することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボットの連続した動作を切り換えるロボット制御装置30であって、前記動作に対応する複数のコントローラを備え、前記ロボットの状態が、切り換え後の動作における拘束条件から導出された不変集合に属すると、切り換え後の動作に対応する前記コントローラの初期状態を算出し、前記コントローラを動的に切り換えるものである。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】従来のロボット装置の制御方法にあっては、制御装置における演算量が多くなり処理に時間が掛かったり、処理速度を上げるために制御装置のコストが増加したりする問題があった。
【解決手段】アクチュエーターの角度センサーの回転角度検出データより、前記角度センサーを備える前記アクチュエーターによって動作する前記アームの角速度を演算する第1演算部と、前記第1演算部の演算対象の前記アクチュエーターを含む連結装置を介して連結される前記アームに備える慣性センサーの角速度検出データより、前記連結装置を軸とする前記アームの角速度を演算する第2演算部と、低周波成分を除去した、前記アクチュエーターと前記アームとの間のねじれ角速度を演算する第3演算部とを備えるロボット装置。
(もっと読む)
ロボットの制御装置及び方法
【課題】ロボットの柔軟制御中にロボットに対して急激に大きな外力が働いた場合に、ロボット各軸の位置の急激な変化に適切に対応し得る可動域制限を行うことができる制御装置及び制御方法を提供する。
【解決手段】本制御装置及び制御方法は、少なくとも1つの関節を有するロボットにおいて、各関節につき、関節位置指令に対して、位置フィードバック制御及び速度フィードバック制御を行い、該関節に設定された関節座標系において、所定の制限開始位置と該関節の現在位置との関係及び所定の制限開始速度と該関節の現在速度との関係に基づいて制限トルクを計算し、計算された制限トルクを速度フィードバック制御の出力に加算して得られるトルクにより該関節の動作を制御する。
(もっと読む)
移動体遠隔操作システム、環境情報収集システム
【課題】直進運動と回転運動についてのバイラテラル制御を正確に行うことが可能な移動体遠隔操作システム等を提供すること。
【解決手段】人が操作を行う操作デバイスを有する操作システムと、前記操作システムに対してなされた人の操作に基づいて駆動される移動体システムと、を備え、前記操作デバイスには、前記移動体システムが環境から受けた反力を再現するためのアクチュエータが取り付けられ、前記操作システムと前記移動体システムとの間でバイラテラル制御が行われる移動体遠隔操作システムであって、前記操作デバイスには、直進運動指示と回転運動指示の双方を含む操作が可能となっており、前記バイラテラル制御の少なくとも一部において、直進運動と回転運動のそれぞれについて独立した演算を行うことを特徴とする、移動体遠隔操作システム。
(もっと読む)
無線伝送装置とそれを用いたロボットの振動抑制制御装置およびロボット制御装置
【課題】無線化した加速度センサをロボットに取り付ける場合、センサを用いた振動抑制の効果を向上できるとともにセンサ基板における消費電力が低減できるようにする。
【解決手段】センサ信号の主成分の振動パラメータ(周波数、振幅、位相)を得る信号解析装置と、該パラメータからセンサ信号の近似波形を生成する信号発生器81を備えて、該パラメータが変更された場合のみパラメータの無線伝送を行う。得られる近似波形から各軸モータの速度を求め、シミュレーションによりロボット動作に基づくモータ速度を得て、モータ速度の差をモータ速度の振動成分とする。モータ速度の振動成分をモータの位置−速度制御ループにフィードバックしてロボットアームに発生する振動を抑制する。
(もっと読む)
軌跡制御装置
【課題】コーナ形状のように指令経路の方向が急峻に変化するような場合でも駆動系に過大な負荷や振動を生じさせずに、また制御系の安定性を損なうことなく軌跡誤差を抑制すること。
【解決手段】複数の可動軸のモータを同時制御することにより可動部の軌跡を制御する軌跡制御装置10において、サーボ系応答軌跡を演算するサーボ系応答軌跡算出部1と、誤差ベクトルを演算する誤差ベクトル算出部2と、誤差ベクトルとサーボ系応答軌跡の所定の参照点における移動方向に基づいて補正ベクトルを演算する補正ベクトル演算部3と、補正ベクトルを各軸に分配して各可動軸の補正量を演算する各軸補正量演算部4と、各可動軸の補正量を対応する軸の位置指令に加算する補正量加算部5、6と、各可動軸の位置がそれぞれの軸の補正後位置指令に追従するように各軸のモータ駆動トルクを出力することによりそれぞれの軸のモータを制御するサーボ制御部7、8を備えた。
(もっと読む)
ロボットの制御装置
【課題】関節に連結されたリンクを揺動させるロボットの制御装置であり、可動範囲の境界付近でのオーバーシュートを抑制するとともに、可動範囲の境界付近以外では応答速度を向上させることのできるロボット制御装置を提供する。
【解決手段】ロボット制御装置は、センサによって計測された計測関節角を目標関節角に追従させるフィードバック制御器と、フィードバック制御器とロボットの機構系によって構成される閉ループ系の特性多項式の根を変更する極配置器を備えている。その極配置器は、予め定められた関節の可動範囲を、可動範囲の境界を含まない第1可動許容範囲と、第1可動許容範囲の外側に設定された第2可動許容範囲とに区分して記憶している。また極配置器は、計測関節角が第1可動許容範囲内に存する場合は前記特性多項式に複素根を設定し、計測関節角が第2可動許容範囲内に存する場合は前記特性多項式に実根を設定する。
(もっと読む)
動力装置の制御装置
【課題】アクチュエータから弾性特性を有する動力伝達要素を介して被動要素に伝達される駆動力の振動を効果的に抑制しつつ、目標とする駆動力を安定に被動要素に付与する。
【解決手段】アクチュエータ2と被動要素5との間の動力伝達系に弾性特性を有する減速機3とばね部材4とを有する動力装置1において、ばね部材4の入力部4aの変位速度の推定値ω1_eと被動要素5の変位速度の推定値ω2_eとの偏差Δω12と、ばね部材4の入力部4aと被動要素5の変位差の計測値θdef_sと被動要素5の目標駆動力τrefに対応する当該変位差の目標値θdef_cmdとの偏差Δθdefとをそれぞれローパスフィルタ25b,25eに通してなる値の線形結合値に応じて、アクチュエータ2の動作目標を決定する。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの実際の姿勢と目標とする姿勢とのずれを低減することと、ロボットの継続的な動作を行なうこととを適切に実現し得る目標運動を生成しつつ、ロボットの動作制御を行なう。
【解決手段】ロボット1の姿勢のずれのを低減するためのフィードバック操作量としてのモデル外力操作量の将来予測値の時系列を生成する手段114を備える。目標運動決定手段100は、モデル外力操作量の将来予測値の時系列により規定される付加的外力の時系列を動力学モデル上でのロボットに付加的に作用させたと仮定した場合のロボットの運動が将来において到達目標に到達又は収束するように、目標運動の瞬時値を逐次決定する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの実際の姿勢の目標姿勢からのずれを素早く補償し得るように目標運動を逐次決定しつつ、ロボットの運動を適切な目標運動に制御する。
【解決手段】第1動力学モデルを用いてロボット1の第1運動の瞬時値を逐次決定する第1運動決定手段100と、第2動力学モデルを用いてロボット1の第2運動の瞬時値を逐次決定する第2運動決定手段120とを備え、第1運動と第2運動とを合成することによりロボット1の目標運動を逐次決定する。ロボット1の実際の姿勢と目標姿勢とのずれを“0”に近づける機能を有するフィードバック操作量の低周波成分、高周波成分をそれぞれ第1運動決定手段100、第2運動決定手段120にフィードバックする。
(もっと読む)
インピーダンス制御パラメータの調整装置および調整方法
【課題】 インピーダンス制御の複数のパラメータを個人のスキルに依存することなく、特別な知識を有していなくても、常に最適なパラメータを調整できるようにする。
【解決手段】 パラメータ初期値算出部117と力指令印加部111と評価基準計測部112と許容値設定部113と粘性パラメータ探索部114と終了判断部115と慣性パラメータ調整部116を備え、力指令印加部11はインピーダンス制御部に対して力指令を入り切りし、評価基準計測部112は力応答の整定時間とオーバシュート量と振動回数を計測し、許容値設定部113はオーバシュート量と整定時間の許容値を設定し、粘性パラメータ探索部114は整定時間が最小となる粘性パラメータを探索し、終了判断部115は調整値と許容値を比較して処理の終了あるいは継続を判断し、慣性パラメータ調整部116はオーバシュート量と整定時間の調整値に応じて慣性パラメータを調整する。
(もっと読む)
多関節ロボット
【課題】フィードバック制御の異常を判断する多関節ロボットを提供する。
【解決手段】多関節ロボットは、各関節角を検出するセンサと、センサの検出値に基づいて関節をフィードバック制御するコントローラを備えている。コントローラは、予め用意されたロボットの運動方程式に、一つの特定関節を除いて他の関節角にセンサの検出関節角を代入して特定関節の角度を算出し、特定関節の算出関節角と検出関節角の角度差が予め定められた許容範囲から外れている場合に、特定関節のフィードバック制御が異常であると判断する。
(もっと読む)
高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラム
【課題】 高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラムを提供すること。
【解決手段】制御装置600は、ロボットのワークの位置、姿勢、力制御値、およびモーメント制御値についての目標値を取得して格納する目標値格納部626と、目標位置および目標姿勢を読出し、切換え行列を適用して力を反映させ、さらに滑り摩擦や慣性力などの外力の除去を含む位置姿勢制御部628とを含み、自由空間と、拘束空間との間の制御力・運動の非干渉化を含む位置姿勢制御部628および力・モーメント制御部630とによって制御出力統合部634からロボットの関節に対する制御信号を生成させている。これらによって,高速高精度なロボットアームの点接触、線接触、面接触のすべての接触作業に適用する位置、姿勢、力及びモーメントの制御技術を提供する。
(もっと読む)
ベルトの駆動装置及びそれを備えたロボット
【課題】ベルト駆動装置やロボットの動作性能の低下を防止するとともに、ロボットのメンテナンス時期を通知することを課題とする。
【解決手段】ベースに対して回転可能な駆動プーリ7と従動プーリ8との間に掛けられて一定の張力が維持されるベルト6と、駆動プーリ7を回転させるサーボモータ11と、サーボモータ11を制御するコントローラ15と、張力を測定可能なロードセル10と、を少なくとも備えたベルト駆動装置において、コントローラ15が、ロードセル10の測定結果からベルト6の固有振動数を算出する自動設定部155を備え、測定結果が問題の無い張力であったとき、サーボモータ11を駆動するモータ駆動部152のノッチフィルタのカットオフ周波数として固有振動数を設定する。
(もっと読む)
ロボット制御装置および制御方法
【課題】角度センサから正常に回転角度が取得できなくなった場合に、迅速にサーボモータを停止させることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、角度センサ160から取得した回転角度に応じてサーボモータの駆動をフィードバック制御する第1の駆動制御部と、サーボモータの電気的変量に基づいてサーボモータの回転角度および回転速度を推定する推定部と、推定された回転角度に応じて、サーボモータの駆動をセンサレス制御する第2の駆動制御部と、サーボモータに対して発電制動を行う発電制動部とを備える。ロボット制御装置200は、角度センサ160の異常を検出すると、推定回転速度が所定の閾値以上の場合には、第2の駆動制御部によってサーボモータを減速させ、推定回転速度が所定の閾値未満の場合には、発電制動部によってサーボモータに発電制動を行う。
(もっと読む)
省エネルギー型ロボット関節駆動制御システム
【課題】本発明は、ロボットの準受動制御において、能動期と受動期の切り替えを遅延なく確実に実現することのできるロボット関節駆動制御システムを提供することを目的とする。
【解決手段】準受動制御の受動期において、出力軸にかかる回転アクチュエータの減速機に起因する摩擦トルクを相殺するような回転トルクを、駆動モータによって付与する。この際、駆動モータの回転トルクは、ロボット関節の出力軸に設けられたトルクセンサの測定値を入力としてフィードバック制御により導出する。その結果、出力側リンクは、減速機の存在にもかかわらず、あたかも自由関節に接続されているかのように挙動し、エネルギー効率の高いロボット関節駆動制御システムを実現する。
(もっと読む)
モーションコントロール装置
【課題】 システムの固有振動角周波数をωnとした場合、指令の払い出し時間がπ/ωn以下、且つ、振動を励起しない指令を容易に生成でき、更に、機械を高速に位置決めすることができる指令を生成するモーションコントロール装置を提供する。
【解決手段】 任意の第1の時間幅と正規化された振幅とを有する第1の基本波形p1と、任意の第2の時間幅と正規化された振幅とを有する第2の基本波形p2と、を発生する波形発生器1,2と、前記第1の基本波形の振幅に第1の所定ゲインA1を乗じて出力し、前記第2の基本波形の振幅に第2の所定ゲインA2を乗じて出力する振幅調整器3,4と、前記第2の所定ゲインを乗じた信号に所定遅延時間を加えて出力する遅延器6と、前記第1の所定ゲインを乗じた信号から前記遅延器の出力信号を減算する減算器5と、を備える。
(もっと読む)
1 - 20 / 61
[ Back to top ]