
Fターム[3C007LV24]の内容
マニピュレータ、ロボット (46,145) | その他の各種制御 (1,668) | サーボ制御 (103) | ゲイン調整を行うもの (42)
Fターム[3C007LV24]に分類される特許
1 - 20 / 42
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
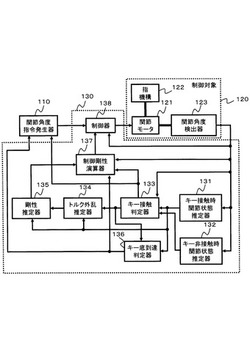
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置

【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
ロボットハンドの制御装置、制御方法、及び制御用プログラム
【課題】ロボットハンドの指先における物体の接触を確実に検出すると共に物体の物性を推定し、当該物性に適合した危険回避制御を実現する。
【解決手段】第1指関節に対するトルク指令によるトルク値から第1指リンクの重量及び慣性力に抗するためのトルク値を減算した第1指関節接触トルクと、第2指関節に対するトルク指令によるトルク値から第2指関節より先端側の部分の重量及び慣性力に抗するためのトルク値を減算した第2指関節接触トルクとに基づいて、前記第1指リンクの指先と物体との接触を検出する。指先が物体に接触していると判定された場合には、物体のヤング率を推定し、指先が物体と接触する際の制御剛性が物体の剛性を超えないように第1及び第2指関節に対するゲインを調整する。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】対象物の個々の行動予測の困難性に応じて移動体の動作を制御する。
【解決手段】制御装置100は、所定の制御パラメータに基づいて移動体の行動を制御する制御部114と、対象物の特徴情報と対象物に関する危険情報とを対応付けて記憶している記憶部104と、対象物の特徴情報を認識する認識部102と、認識部102により認識された対象物と移動体との距離を検出する検出部108と、検出部108による検出結果と対象物の特徴情報に対応する危険情報とから、制御パラメータを決定する決定部112と、を備える。
(もっと読む)
2足移動体の補助装置
【目的】ロープ状の接続部材の緩み量をできるだけ少なくし、2足移動体が姿勢を崩して転倒しかけた場合、その荷重を支持するときの衝撃を減少させるようにした2足移動体の補助装置を提供する。
【解決手段】2足移動ロボット12にロープ状の接続部材(18)を介して接続されると共に、2足移動体が姿勢を崩したときに2足移動体を上方から支持するリフタ(14)からなる2足移動体の補助装置において、リフタを3次元空間において移動自在なリフタ移動手段(20、22、24、26、28、30)と、リフタ移動手段の動作を制御するリフタ制御部(38)と、3次元空間における2足移動体の位置を検出する検出手段(32、34)とを備えると共に、リフタ移動手段制御手段は、検出された位置に基づいてリフタが2足移動体に追従するようにリフタ移動手段の動作を制御するように構成する。
(もっと読む)
移動体の制御装置
【課題】基体の上下動運動を行いながら移動する移動体において、オーバーシュートやアンダーシュートの発生を抑制しつつ、基体の目標姿勢に対する実際の姿勢のずれを円滑に解消する。
【解決手段】基体24の姿勢に関する状態量偏差Δθを“0”に収束させるようにフィードバック制御則により要求操作量を決定するとき、フィードバック制御則のフィードバックゲインを、移動体1又は基体24の目標慣性力の時系列のうちの現在時刻から将来の所定時刻までの期間内の時系列を用いて決定し、その決定したフィードバックゲインと状態量偏差の観測値とからフィードバック制御則の演算により要求操作量を決定する。
(もっと読む)
ロボットの制御装置、及びロボットの制御方法
【課題】慣性センサー信号の遅延に起因する振動発生を抑制する。
【解決手段】ロボット制御装置は、基体に対して回転可能なリンクとしてのアーム40、アーム40を駆動するアクチュエーターとしてのモーター20と、モーター20のトルクをアーム40に減速非Nで伝達する減速機構60と、前記リンクによって回転されるアームと、前記アクチュエーターの回転角度θmを検出する角度センサーと、前記アームの回転角度θaを検出する慣性センサーと、を備えるロボット制御装置の制御方法であって、
前記慣性センサー信号の遅延量を前記ロボットの機構モデル系の運動方程式に加えてフィードバックゲインを設定し、前記慣性センサー信号の遅延に起因する前記リンクの振動を抑制することを特徴とするロボットの制御装置。
(もっと読む)
擦弦楽器演奏ロボット
【課題】目標値に対する追従性が向上し、音色が人間の演奏に近くなる擦弦楽器の自動演奏ロボットを提供する。
【解決手段】歪ゲージ930によって弓920の歪を計測する。演奏データ記憶部210には、楽曲演奏時に弓毛922が弦911を押す応力を指令する歪データが設定記憶されている。弓押込角算出部310は、前記歪データに追従するために必要な弓920の押し込み角の指令値を算出する。制御パラメータ設定部350は、楽曲演奏時に弓毛922と弦911と接触位置に応じて制御パラメータを更新設定する。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
ロボット装置及びその制御方法
【課題】消費電力量を抑制しつつ、柔軟に所望動作を実行できるロボット装置及びその制御方法を提供すること。
【解決手段】ロボット装置101は、複数の関節を有するロボット機構110と、ロボット機構110の関節軸を駆動する複数のアクチュエータ109と、を備えている。また、ロボット装置101は、アクチュエータ109に対するトルク指令の関数である評価関数に基づいて、アクチュエータ109の駆動を柔軟に制御するロボット制御装置102を備えている。
(もっと読む)
2足歩行ロボットの制御装置、及び2足歩行ロボットの制御方法
【課題】不整路面において継続的な歩行安定性を向上することができる2足歩行ロボットの制御装置、及び2足歩行ロボットの制御方法を提供する。
【解決手段】歩行パターン生成部25は、平坦な路面Gを2足歩行ロボット1に歩行させるための基準歩行処理を実行することにより、足底部9を着地させる位置となる基準歩行パターンを生成する。制御装置5は、路面Gが不整路面である場合に2足歩行ロボット1を当該不整路面に適応させるための路面適応処理を実行し、軌道修正パターンを生成する。制御装置5は、全体として、軌道修正パターンを用いて前記基準歩行処理により生成した基準歩行パターンを修正して、修正歩行パターンを生成し、2足歩行ロボット1を不整路面に適応させる。
(もっと読む)
全身協調装置、ロボット及びロボットの制御方法
【課題】全身協調動作においても正確な位置制御を行うことができるロボット及びロボットの制御方法を提供すること。
【解決手段】ロボットは、モータと、モータ駆動するモータドライバと、モータドライバに指令値として関節角を入力する協調制御部133とを有する。協調制御部133は、
重心速度から関節角速度を求める角速度算出手段14と、角速度算出手段14が算出した角速度から第1関節角を算出する積分手段13と、予め定められた第2関節角を入力する関節角入力手段11と、積分手段13が算出した第1関節角及び関節角入力手段11から入力された第2関節角から重心位置を算出する重心位置算出手段14aと、重心位置算出手段14aが算出した重心位置及び外部から入力される目標重心位置から重心速度を算出するフィードバック手段15aとを有する。
(もっと読む)
倒立走行ロボット及びその制御方法
【課題】走行中に障害物等に衝突するなどの異常が発生しても速やかにリカバリー動作を実行することができる倒立車輪型移動体を提供すること。
【解決手段】倒立走行ロボット1は、車体11と、車体11に取り付けられた2以上の車輪15と、車輪15を補助する1以上の補助輪16と、倒立を維持するための安定化制御手段と、安定化制御手段が算出した制御量に応じて前記車輪を駆動する駆動手段と、補助輪16と当該補助輪16の地面との接地点との間に少なくとも1軸方向以上の圧力を計測できる1以上の感圧センサ17とを有し、安定化制御手段は、停止中及び走行中の感圧センサ17の値を監視し異常の有無を検知する。
(もっと読む)
ロボットのターゲット位置検出装置
【課題】 ターゲットの位置を高精度で検出することができるロボットのターゲット位置検出装置を提供する。
【解決手段】 ロボット22は、X軸、Y軸、Z軸の3軸方向に自由度を有するアーム32の先端部に、水平方向の自由度を有する手首が設けられ、この手首にはエンドエフェクタであるハンド33が設けられる。制御手段23は、教示点を記憶部26に記憶させ、この記憶部26に記憶させた教示点にハンド33が向かうように、ロボット22の動作を制御する。この制御手段23は、制御ループゲインを変化させて、ハンド33のターゲット46への押付け力を変更可能であって、少なくともターゲット46が存在する教示点近傍から、手首軸の制御ループゲインを所定値よりも低下させて、ハンド33をターゲット46に接触させ、ハンド33がターゲット46に接触した状態における位置を取り込んで、ターゲット46の位置を検出する。
(もっと読む)
液圧作動ブームの調整方法、装置およびコンピュータプログラム
本発明は、液圧作動ブームの動作を調整する方法および装置ならびにコンピュータプログラムに関するものであり、ブーム(1)は、液圧アクチュエータ(5a〜5b、7a〜7b)によって相対的に動くように連結された少なくとも2つの可動的相互連結ブーム部(1a、1b)と、液圧アクチュエータを制御する制御手段(13、14)と、ブーム部(1a、1b)間の位置を検出する検出器(15)とを含み、それにより、ブーム(1)の動作を調整するために、制御手段にある継ぎ手制御装置の、動きに固有の調整パラメータを個々の動きごとに設定することができる。本発明では、ブーム部(1a、1b)の相対的動きをブーム部(1a、1b)間の所定の位置に対してその両側において制御し、制御信号に応じて検出器(15)から取得した実際の位置および運動速度の値を理論上の位置および運動速度の値と比較し、これらの値の間の差に基づいて継ぎ手制御装置の調整パラメータを調整する。 (もっと読む)
多関節型ロボットの制御方法
【課題】静的な条件で計測し、テーブル化されたコギング補償電流テーブルによる従来のFFコギング補償方式では、重力補償電流による最適位相の変化やエンコーダ取付誤差による最適位相の誤差に対応した位相シフトが行われず、十分な振動抑制効果を発揮できないという課題を有していた。
【解決手段】重力トルク補償電流の検出及びその検出値によるコギング補償位相の補正手段を持ち、さらに、FFコギング補償無効時のモータ電流からコギング周波数成分の検出及びその検出値によるコギング補償最適位相のモータ個体差の補正手段を持つことで、重力補償電流によるコギング補償の最適位相の変化あるいはエンコーダ取付誤差による最適位相誤差が存在しても、コギングトルクに起因する振動を抑制することができる。
(もっと読む)
多関節型ロボットの制御方法
【課題】従来のオブザーバ制御演算装置では、ロボット自身の姿勢やアームに取り付ける負荷の変化に対応して制御性能の劣化を防ぐには、負荷イナーシャ、状態オブザーバ、状態FBのパラメータのリアルタイムでの演算が必要であり、演算処理の負荷が非常に多くなる。
【解決手段】アームに取り付けられる複数の負荷に応じて予め調整されたパラメータを持つ複数の状態オブザーバと状態FBの演算を同時に行い、アームに取り付けられる負荷情報に基づいてそれぞれの状態FB値のモータ電流指令への加算量を調整する際に、各姿勢におけるアーム回転半径の最大値に対する2乗比の1次関数として定義する姿勢ゲインを乗じることにより、リアルタイムで負荷イナーシャ、状態オブザーバ、状態FBのパラメータ演算を行う必要はなく、ロボットの姿勢変化に応じた振動抑制効果が得られる状態で演算時間を削減できる。
(もっと読む)
移動ロボットの駆動装置
【課題】安全性を考慮した低電圧要求と高速移動のための高電圧要求とを共に満足し、よって効率的に電圧を供給するようにした移動ロボットの駆動装置を提供する。
【解決手段】関節を介して連結される複数本のリンク(大腿リンクなど)の関節に配置される電動モータ(1Yモータ42,2Yモータ46など)と、複数本のリンク以外の部位に配置される電源(バッテリ)28と、電源と電動モータを接続する電力線90を通じて電源から供給される電圧を通電指令に応じて電動モータに供給して駆動する駆動回路(モータドライバ92)とを備えた移動ロボットの駆動装置において、電動モータに供給される駆動電圧を昇圧する昇圧器98を備えると共に、電動モータと昇圧器と駆動回路とを同一のリンク(大腿リンクなど)に配置する。
(もっと読む)
ロボット制御装置
【課題】ロボットの柔軟制御を行うためのロボット制御装置に関し、柔軟制御中のロボットの姿勢を保ちつつ、追従する方向からずれた方向に力を加えた場合でも、追従する方向への動作が妨げられるのを防止することを目的とする。
【解決手段】ロボットの制御軸毎に位置および速度の制御ループを有し、柔軟制御中の特定の制御軸の位置制御ゲインおよび速度制御ゲインを、特定の制御軸以外の制御軸の位置制御ゲインおよび速度制御ゲインより低く設定し、ロボットのアーム先端が外力に追従中に取るべき姿勢即ち追従を開始する直前のロボットのアーム先端の姿勢を求め、ロボットのアーム先端に与えられた外力により移動した特定の制御軸の現在位置と、外力に追従すべき方向と、追従を開始する直前の姿勢とに基づいて求められた特定の制御軸以外の制御軸の位置指令または速度指令を当該制御軸の制御ループに与えるように構成される。
(もっと読む)
脚式移動ロボットの制御方法及び脚式移動ロボット
【課題】路面形状に倣って変化した脚部関節の実角度を目標角度に追従させるために脚部関節を再び硬くしたときに、脚部関節が実角度と乖離した目標角度に追従することによる脚式移動ロボットの不安定挙動を抑制する。
【解決手段】制御部14は、遊脚(脚部リンクLR)が路面に着地する際に、脚部リンクLRが有する足首関節122が柔らかくなるように足首関節122を駆動するアクチュエータ15を制御し、足首関節122の実角度を予め設定された目標角度に追従させることなく路面の形状に応じて変化させる。また、制御部14は、脚部リンクLRが着地した後に、足首関節122の実角度と目標角度との差分を打ち消すように足首関節122の目標角度の軌道を補正する。さらに、制御部14は、足首関節122が硬くなるようにアクチュエータ15を制御することで、支持脚となった脚部リンクLRの足首関節122の実角度を補正後の目標角度の軌道に追従させる。
(もっと読む)
1 - 20 / 42
[ Back to top ]