
Fターム[3C007MT05]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 振動防止、安定性 (83)
Fターム[3C007MT05]に分類される特許
81 - 83 / 83
ガラス搬送装置およびその使用方法
ガラス搬送装置および方法であって、ガラスシートがガラス製造設備内のある地点から別の地点へと移動される際に、ガラスシートの振動を最小限に抑えるようにガラスシートと係合しそれを保持するための強化ロボットが使用される、ガラス搬送装置および方法が本明細書に記載されている。強化ロボットは、1つ以上の吸着カップおよび1つ以上の空気力学式装置を使用することによって、ガラスシートと係合しそれを保持する。吸着カップは、ガラスシートが移動される際に、ガラスシートの外側縁部または非品質領域と接触してそれを支持する。また、空気力学式装置は、ガラスシートが移動される際に、ガラスシートと接触せずに空気力学式装置がガラスシートの品質領域を支持および保持できるように、ガラスシートの中央部分または品質領域に向かってガスを放出する。該装置はまた、空気力学式装置から放出されるガスの温度がガラスシートの温度と実質的に一致するように、空気力学式装置からガラスシートに向かって放出されるガスの温度を調節するための温度制御装置を使用してもよい。 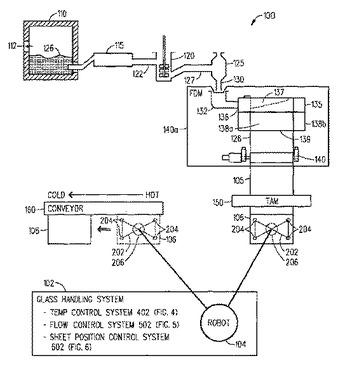 (もっと読む)
(もっと読む)
関節駆動装置および関節駆動装置の制御方法
【課題】 関節部の制御の正確性を高めながらも、極力、アナログ情報の入力数を低減し得る関節駆動装置を提供する。
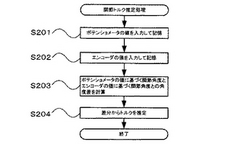
【解決手段】 装置のモータ側にエンコーダを接続する一方、関節部側にポテンショメータを接続し、ポテンショメータおよびエンコーダの値を読み込んでメモリに記憶した後(S201、S202)、記憶したポテンショメータの値を関節角度θPに、記憶したエンコーダ3の値を関節角度θEにそれぞれ変換し、その角度差θP−θEを計算する(S203)。角度差と関節部の負荷トルクとの関係を示す負荷トルクデータを予め記憶部に記憶し、その負荷トルクデータと、S203で算出された角度差とに基づいて、関節部の負荷トルクを推定する(S204)。
(もっと読む)
ロボット装置及びロボット装置の制御方法

【課題】 ロボットの歩行パターン生成演算を、運動状態量に関する境界条件、外力、外力モーメント、足底軌道などのパラメータが設定可能な形式で、実機上で実時間により実行可能にする。
【解決手段】 センサなどから計測されたロボットの運動状態量、外力及び外力モーメント、環境形状などの実世界の物量を入力するように歩行制御系を構成する。機体のバランス維持に係るすべての計算を単一の歩行パターン演算に集約させることにより、歩容生成機能と適応制御機能を効率的に両立させるとともに、力学モデルの一貫性を保証し、各力学モデル間の干渉を取り除く。
(もっと読む)
81 - 83 / 83
[ Back to top ]