
Fターム[3C007WB09]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 歩行制御 (469) | 特定位置(重心等)に着目して制御 (95)
Fターム[3C007WB09]に分類される特許
1 - 20 / 95
脚式ロボット
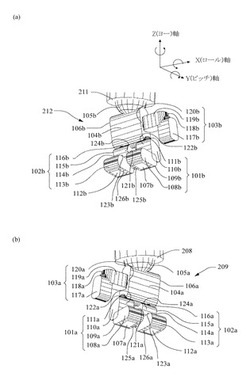
【課題】手部の指部の把持面が4足歩行時に損傷するのを回避し、4足歩行時に圧覚センサを用いた制御によってロボット本体の姿勢の安定性の向上を図る。
【解決手段】4つの肢部をもつ脚式ロボットの上肢部に設けられた手部209,212を用いて、ナックル歩行により安定な4足歩行を行う。右手部209には、2本の指部101a,102aの指背面125a,126aに接地検出用の手部圧覚センサ107a,112aが設けられている。また、左手部212には、2本の指部101b,102bの指背面125b,126bに接地検出用の手部圧覚センサ107b,112bが設けられている。これら手部圧覚センサ107a,112a,107b,112bを用いてナックル歩行時の姿勢が制御される。
(もっと読む)
ロボット制御システム

【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
二脚型移動装置
【課題】人間が暮らす住環境に存在する障害物をスムースに跨ぎ越すことのできる二脚型移動装置を提供する。
【解決手段】角度自在に屈折可能な膝関節を有する第1および第2の脚と、第1および第2の脚の根元の関節(腿関節)をそれぞれ回動自在に支持する臀部10と、前記膝関節の屈折角度および前記腿関節の回転角度をそれぞれ制御して、進行方向の床上に設けられた凸状の障害物を跨ぎ越す跨ぎ越し制御手段と、を備える。跨ぎ越し制御手段は、第2の脚を障害物の後方側に接地させた状態で第1の脚を前記障害物の上方へ振り出して該障害物を跨ぐ場合に、第2の脚の膝関節を後方へ突出させた姿勢(逆膝の姿勢)に制御する。好ましくは、第1および第2の脚の先端に設けられた第1および第2の車輪機構による走行を併用することにより、等速で走行しながらのスムースな跨ぎ越しを行う。
(もっと読む)
2足移動ロボットの制御装置及び歩容生成装置
【課題】2足移動ロボットに片脚ホッピング動作を行なわせるときに、離床・着床動作を行なう脚体の基端部の関節に大きなモーメントが作用するのを防止する。
【解決手段】片脚ホッピング動作を2足移動ロボット1に行わせるとき、離床・着床動作を行なう脚体2(支持脚側脚体2)の離床後の着床状態において、支持脚側脚体2の基端部よりも、支持脚側脚体2と異なる脚体2(遊脚側脚体2)の基端部の方が相対的に高い位置に存在するように、ロボット1の目標運動(上体24の目標姿勢)を生成する。
(もっと読む)
2脚歩行ロボット
【課題】路面に対して足平が予定外に傾いた際に、歩行安定性を確保しつつ足平の傾きを抑える2脚歩行ロボットを実現する。
【解決手段】2脚歩行ロボットは、足平から路面までの距離を計測する距離センサを備えている。各脚関節を制御するコントローラは、次の処理を実行する。重心加速度算出ステップ:距離センサによって予定外に足平が路面に対して傾いたことを検知したときに、そのときの重心の加速度を算出する、重心軌道決定ステップ:算出した重心の加速度を初期値とし、所定期間の終端で予め定められた速度を有することを終端条件としてZMP方程式を解いて重心の軌道を算出する、及び、関節目標角算出ステップ:算出された重心の軌道から脚関節の目標角の時系列データを算出する。そしてコントローラは、関節目標角算出ステップで算出された目標角の時系列データに追従するように各脚関節を制御する。
(もっと読む)
2脚歩行ロボット及びそのための歩容データ生成方法
【課題】2脚歩行ロボットの歩容データを効率よく計算する技術を提供する。
【解決手段】歩容データ生成方法は、軌道算出ステップと目標角算出ステップを備える。軌道算出ステップは、予め定められた軌道計算周期毎にZMP方程式に基づいて重心位置の時系列データを算出する。目標角算出ステップは、時系列データの各時刻における重心位置から脚関節の目標角を算出する。軌道算出ステップはさらに、現在時刻T0から少なくとも軌道計算周期に相当する初期期間TS1の間は関節のサーボ制御周期に相当する第1時間間隔で重心位置の時系列データを算出し、初期期間TS1以降は第1時間間隔よりも長い第2時間間隔で重心位置の時系列データを算出する。目標角算出ステップは、初期期間における各時刻の重心位置から脚関節の目標角を算出する。
(もっと読む)
ロボットの制御装置
【課題】関節とこれを駆動するアクチュエータとの間の動力伝達系にばね部材を備えた移動ロボットのふらつきを防止しつつ、該移動ロボットの所望の動作を安定に行なうことを可能とする。
【解決手段】移動ロボット1の運動状態量目標値は、移動ロボット1全体の並進運動量の1階微分値の鉛直方向成分の目標値を少なくとも含み、この目標値は、移動ロボット1の全体重心点の鉛直方向の位置の観測値をフィードバック制御則により所定の目標値に収束させるように状態量目標値決定部84で決定される。制御入力決定部85は、運動状態量目標値を用いて逆動力学演算の処理を実行することにより、各関節の目標駆動力を決定する。この目標駆動力に応じてアクチュエータ50の動作が制御される。
(もっと読む)
人間型ロボット及びその歩行制御方法
【課題】 関節トルクのサーボ制御に基づいて安定的な歩行を具現する人間型ロボット及びその歩行制御方法を開示する。
【解決手段】 人間型ロボットは、センサの測定値で関節位置軌跡補正値と関節トルク補正値をそれぞれ計算し、計算された各補正値を用いて関節位置軌跡と関節トルクを補正し、補正された関節トルクによって関節に設置されたモータを駆動することができる。
(もっと読む)
重心移動装置を有する2足歩行ロボット及び重心移動方法
【課題】2足歩行ロボットにおいて、ヒトの2足歩行運動の様に、より自然な歩行姿勢を実現するための構造と重心移動方法を提供する。
【解決手段】腰部4と両脚から成る下肢と、腰部を軸に傾斜可能な腹部3と、頭部6及び可動可能な両腕が接続され、腹部を軸に回転可能な構造の胸部から成る上体から構成され、胸部筐体内に独立して上下左右に可動可能なバランサー42と称する駆動用バッテリー及びスタビライザー43と称する重心移動用補助錘を搭載し、各可動部はアクチュエーター8により可動であり、頭部に擁する3軸加速度センサー22により腰部を絶対水平に保ち、前後の重心移動は上体の前傾動作もしくは後傾動作、もしくはスタビライザーの胸部2筐体内での位置移動もしくは両脚の足関節部動作により行い、また左右の重心移動は腹部を軸とする胸部の回転動作と、バランサーとスタビライザーの複合動作により行う2足歩行ロボット。
(もっと読む)
脚式ロボットとそのための歩容データ生成方法
【課題】脚式ロボットの歩容データを効率よく生成する方法を提供する。
【解決手段】歩容データを生成する方法は、以下の第1〜第4ステップを有する。第1ステップでは、脚式ロボットのZMP方程式において、動作依存モーメント項に初期値を代入して重心と足の目標軌道を決定する。動作依存モーメントは、脚式ロボットの脚の動作に起因して重心回りに作用するモーメントを意味する。第2ステップでは、得られた重心と足の目標軌道に脚式ロボットの質点モデルを適用して重心の目標軌道上の各時刻における重心回りの角運動量を算出する。質点モデルは、夫々の脚を1個の質点でモデル化したものである。第3ステップでは、各時刻の角運動量から、角運動量変化に相当する相当モーメントを算出する。第4ステップでは、ZMP方程式の動作依存モーメントの項に相当モーメントを代入して重心と足の目標軌道を再決定する。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】瞬時歩容発生手段が発生した瞬時目標運動では考慮されていない、各脚体の中間部の関節の屈曲動作に伴う慣性力の影響を補償して、動力学的な精度を高めるように該瞬時目標運動を補正する。
【解決手段】ロボット1の各可動体2の中間部の関節の曲げ角を参照量Aとし、各可動体2の先端部近傍の所定の点と、該可動体2の上体3との連結部近傍の所定の点とを結ぶ線分と、該可動2の中間部の関節の中心または該関節に連結されたリンクの重心との前記線分に交差する方向での相対位置を参照量Bとしたとき、参照量A又は参照量Bに応じて、フィードフォワード制御則によりロボット1の瞬時目標運動の上体位置と上体姿勢とのうちの少なくともいずれか一方の補正量を決定し、その決定した補正量で瞬時目標運動の上体位置と上体姿勢とのうちの少なくともいずれか一方を補正する。
(もっと読む)
情報処理装置及び情報処理方法、並びにコンピューター・プログラム
【課題】人型キャラクターやヒューマノイド・ロボットのさまざまな環境との接触を含む運動データを、安価な計算量で且つ実時間で生成する。
【解決手段】人型キャラクターやヒューマノイド・ロボットといった多リンク系の構造体を制御対象とし、各リンクの局所的運動だけでなく、系全体の対極的な運動に着目して、重心と外力との関係から、あらゆる環境との接触を考慮した一般接触運動の本質的な特性を、環境との接触状態を保つための制約式として導出し、この制約式と、与えられた環境との接触状態、及び将来の重心目標値とから、長期的な接触状態の安定性を担保した運動データを生成する。
(もっと読む)
脚式歩行ロボットの歩容生成器
【課題】実験やシミュレーションによる試行錯誤的なパターン生成作業や,ハードディスクなどの大容量記録媒体を必要とせず,両脚支持期を含む歩容でも容易に高速にオンライン生成することができる二足歩行ロボットの歩容生成器を提供する。
【解決手段】1歩の片脚支持の時間を定常歩容でも過渡歩容でも同じ固定値とし,倒立振子モデルより得られた数式により歩容を生成する。1歩ごとに歩行速度指令を確認し,新しい歩行速度指令が前回の歩行速度指令と同じならば定常歩容を生成し,異なれば2歩先の着地時に新しい歩行速度指令での定常歩容となるように過渡歩容の前後方向着地位置を決定する。両脚支持期にはZMPが常に重心の真下となるように歩容を生成する。
(もっと読む)
脚式ロボット
【課題】脚部を大型化することなく段差の昇降性能を向上させる。
【解決手段】基体10に複数の脚部20が設けられた脚式ロボットであって、基体10は、基体前後方向の前側基体11と、基体前後方向の後側基体12と、前側基体11及び後側基体12を、ロール軸回りに相対変位可能な状態で連結する腰関節13と、を備える。前側基体11及び後側基体12には、夫々、複数の脚部20を設けている。腰関節13により、前側基体11と後側基体12との間には、ロール軸回りの自由度が与えられるので、一方に対して他方を捻ることが可能となる。
(もっと読む)
自立走行装置
【課題】外力Fを加えた方向に自立走行する自走車またはロボットを提供する。
【解決手段】フロア上を任意の方向に自立して走行する自立走行装置1は、走行機構部12と走行機構部12の上方に位置する走行本体部11と走行本体部11に加えられた荷重を測定する複数の荷重センサ13とを有し、走行機構部12は、駆動部15と、駆動部15を走行本体部11に対して全周施回可能に操舵する操舵部14とを有する走行ユニットを複数備えると共に、複数の荷重センサ13により検出された荷重から自立走行装置1の重心を求め、重心の変位を算出し、自立走行装置1が安定な状態を維持できるように操舵部14を制御する制御部10と、を有する。
(もっと読む)
ロボット及びその歩行制御方法
【課題】二足ロボットの歩行時、膝を最大限に伸ばして腰の動きを最小化し、人間の歩行パターンと最大限に類似した歩行パターンを生成するロボット及びその歩行制御方法を提供する。
【解決手段】歩行パターンを生成し、前記歩行パターンに対応する歩行パターン類似度を計算し、前記歩行パターン類似度を予め定められた基準パターン類似度と比較し、その比較結果によって前記歩行パターンを変更することを含んでロボットの歩行制御方法を構成する。
(もっと読む)
脚式ロボット及びその制御方法
【課題】ロボットが転倒する危険性を迅速かつ正確に評価し、さらに、転倒時のロボットに対する衝撃を低減すること。
【解決手段】本発明に係るロボット2は、ZMP規範に基づいてロボット2の安定化制御を行うロボットであって、ロボット2をモデル化した方程式であって、ロボット2の状態を示す状態変数を含む状態方程式を用いて、現時点から所定の時間先の物理量を示す予測物理量を計算する予測物理量計算手段21と、予測物理量計算手段で計算した予測物理量に基づいてロボット2の転倒危険性を判断する転倒判断手段22と、を備え、予測物理量計算手段21は、状態方程式に所定の制御入力を与えて該制御入力に対する状態方程式の出力を取得し、該取得した状態方程式の出力と、観測するロボット2の観測物理量とに基づいて状態変数を推定し、該推定した状態変数に基づいて予測物理量を計算する。
(もっと読む)
脚式歩行ロボットの安定化制御装置
【課題】 前後方向と左右方向の安定化制御が互いに影響し合うことなく,足裏の小さいロボットでも前後左右からの外乱に対して高い安定性で動作することができる脚式歩行ロボットの安定化制御器を提供する
【解決手段】 上体傾斜角,上体傾斜角速度,重心位置補正量,重心速度補正量の4つを状態変数とし,重心加速度補正量を操作量とした状態方程式でロボットをモデル化する。前後方向,左右方向それぞれについて,この状態方程式を用いてレギュレータを構成し,計8つの状態変数全てを0に収束させる。
(もっと読む)
脚式歩行ロボットの安定化制御装置
【課題】 前後方向と左右方向の安定化制御が互いに影響し合うことなく,足裏の小さいロボットでも前後左右からの外乱に対して高い安定性で動作することができる脚式歩行ロボットの安定化制御器を提供する。
【解決手段】 足平推力を関節モータトルクに変換する推力変換器と,エンコーダ情報から足平相対位置情報を算出する順キネマティクス演算器を備えることにより足平推力を操作可能とする。上体傾斜角,上体傾斜角速度,重心位置偏差,重心速度偏差の4つを状態変数とし,支持脚足平推力補正量を操作量とした状態方程式でロボットをモデル化する。前後方向,左右方向それぞれについて,この状態方程式を用いてレギュレータを構成し,計8つの状態変数全てを0に収束させる。
(もっと読む)
力バランス移動ロボットシステム
力バランスロボットシステムおよび関連する方法が開示される。ロボットシステムは、本体と、バランス部材と、バランスシステムとを含み得る。ロボットシステムは、静的に不安定であり得、これは静的に不安定な本体を有する結果であり得る。バランス部材は、本体にジョイントで接続され得る。バランスシステムは、ロボットシステムのバランスを動的に取るために用いられる1つ以上のサブシステムを有し得る。そのようなサブシステムは、再位置決めシステムと、加速システムと、駆動システムとを含み得る。再位置決めシステムは、バランス部材を再位置決めして、質量中心を目標の上方に位置決めすることができる。加速システムは、バランス部材を加速させて、目標トルクを生じることができる。駆動システムは、前記ロボットシステムの車輪を駆動して、バランスを維持することができる。バランスを保持しながら、ロボットシステムは、外力を吸収し、外部対象物に力を加え得る。 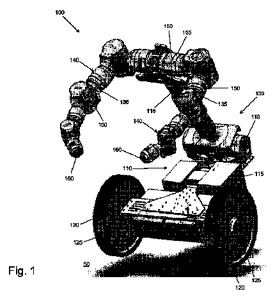 (もっと読む)
(もっと読む)
1 - 20 / 95
[ Back to top ]