
Fターム[3C007WB20]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 外部情報を利用するもの (521) | 他のロボットの状態、指示 (25)
Fターム[3C007WB20]に分類される特許
1 - 20 / 25
ロボットシステムおよびそれに用いる空間陣形認識装置
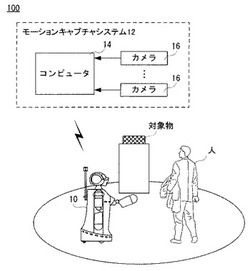
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
清掃ロボットシステム及びその制御方法

【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
給仕サービスのためのロボットシステム
【課題】複数台の移動型ロボットを合理的に運用して省エネルギのもとに質の高い給仕サービスを提供すること。
【解決手段】各移動型ロボット100の状態情報に基づいて移動型ロボット100が調理物引渡場所14に到着できる時刻を予測演算し、予測演算された各移動型ロボット100の到着時刻のうち最も到達時刻が早い一台の移動型ロボット100を選択して当該移動型ロボット100に調理物配達を実行させる処理を行う。
(もっと読む)
ネットワークロボットシステム、ロボット制御装置、ロボット制御方法およびロボット制御プログラム
【構成】 ネットワークロボットシステム10は、ロボット12を含み、ロボット12はサービスの提供に係る移動経路の生成要求の要求メッセージをロボット制御装置102に送信する。ロボット制御装置102は、要求メッセージを受けて、ロボット12同士が衝突しないように、当該要求メッセージについての移動経路を生成する。そして、ロボット制御装置102は、移動経路のうちの一定時間(T秒)分の移動経路についての移動経路データをロボット12に送信する。
【効果】 他のロボットと干渉することなく、確実に移動することができる。
(もっと読む)
ロボット、ロボットの駆動制御方法
【課題】ロボット間の干渉や衝突を防止する。
【解決手段】駆動プログラムに従って駆動させるロボットの駆動制御方法であって、前記駆動プログラムに従って前記ロボットを駆動させ、前記ロボットの駆動状況を検出するとともに、検出した駆動状況を駆動状況データーとして記録し、前記駆動状況データーに基づいて、前記駆動プログラムを更新し、前記更新された駆動プログラムに従って前記ロボットを駆動させる。
(もっと読む)
ロボット連携システム、ロボット連携方法及びプログラム
【課題】サービス提供エリアの混雑状況及びユーザごとの重要度を考慮してロボット間でサービスの引継ぎを行えるようにする。
【解決手段】引継方式決定制御プログラム132に従い、位置情報データベース143に記憶された各ユーザの最新の位置座標データをもとにサービスを受けていないユーザ数をカウントし、このユーザ数とサービス提供中のユーザU1の重要度mとをもとに、サービス種別SS1〜SS3に対応して予め用意された境界関数の計算式に従い境界関数を計算する。そして上記計算された境界関数の値がf>0であるか、f≦0であるかを判定し、f>0の場合に「指示方式」を、f≦0の場合には「アテンド方式」を選択する。また、引継ポイント決定制御プログラム133に従い、「指示方式」が選択された場合と、「アテンド方式」が選択された場合とで、異なるアルゴリズムで引継ポイントを決定する。
(もっと読む)
情報処理システム、プログラム及び情報記憶媒体
【課題】ユーザの日常度を利用した情報処理や情報提示を可能にする情報処理システム等の提供。
【解決手段】情報処理システムは、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つのセンサからのセンサ情報を含む情報に基づいて、ユーザの状況を推定する状況推定部と、ユーザの状況履歴情報を記憶する履歴情報記憶部と、ユーザの日常度を評価する処理を行う日常度評価部と、日常度評価部の評価処理により得られたユーザの日常度を、ユーザの状況履歴情報の各ユーザ状況に関連づけて履歴情報記憶部に書き込む書き込み部を含む。
(もっと読む)
救援ロボットシステム、救援方法及び救援ロボット
【課題】
自律移動ロボットが自己位置の推定に失敗した場合、管理者による操作・介入によるリカバリでは管理者の場所への移動、救援リカバリのタイミングに問題がある。また、リカバリを高性能制御装置、ロボットのCPUの処理量及びメモリ使用量を少なくして救援リカバリを行う必要がある。
【解決手段】
管理サーバが自律移動ロボットのロボット情報を保持し、定期的に自律移動ロボットから位置情報を取得し、自律移動ロボットから救援の通知を受けた場合に配下のロボットに救援を指示し、救援指示を受けた救援ロボットは該当ロボットの探索を行い、被救援ロボットとの相対位置より被救援ロボットの絶対位置と方位を算出して被救援ロボットのリカバリを行う。
(もっと読む)
自律型ロボット及び自律型ロボットを複数用いる協調作業システム
【課題】作業領域での作業時間を考慮し、複数の自律型ロボットが協調して作業する自律型ロボット及び自律型ロボットを複数用いる協調作業システムを提供し、作業効率を最適化する。
【解決手段】複数の雑草群Zが存在する圃場Hにて雑草群Zを順に移動して除草作業を実施する除草ロボット10は、現在位置から雑草群Zまでの距離を評価距離とし、前記雑草群Zの雑草面積とし、雑草群Zと、該雑草群Zの最も近い、他の除草ロボット10が除草作業を実施している雑草群Zとの距離を分散距離とし、前記評価距離のみ正負の異なる係数を用いる該評価距離と前記雑草面積と前記分散距離との線形結合を評価値とし、該評価値に基づいて次に除草作業を実施する除草作業領域である雑草群Zを選定する。
(もっと読む)
ロボット、同期制御方法及びプログラム
【課題】無線での通信手段しか存在しない場合においても、定期的に合奏を満足する精度のタイミングの同期をとることを可能にするロボット、同期制御方法及びプログラムを提供する。
【解決手段】基準ロボット10は複数個のLED13を所定の点灯パターンで発光させ、演奏ロボット30はCCD33によりLED13の点灯パターン周期と異なる周期でLED13の点灯パターンを取りこみLED点灯中央演算部36で点灯度を計算する。一方、基準ロボット10はLED点灯中央値演算部17で自身の点灯度を計算する。無線通信部19,38を介して、点灯度の情報を伝達し、両者の点灯度を比較して遅延時間計算部20で演奏ロボットの遅延時間を計算する。計算された遅延時間は演奏ロボットに通知され動作タイミングを修正する。
(もっと読む)
ロボットおよびタスク実行システム
【課題】複数のロボットのそれぞれによりタスクが円滑に実行されうるように、他のロボットに搭載されている複数のアクティブセンサの相互干渉を回避することができるロボット等を提供する。
【解決手段】複数のロボットRのそれぞれに搭載されているアクティブセンサが相互に干渉する可能性があり、かつ、自己ロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度が、他のロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度よりも低い状況において、自己ロボットRの当該アクティブセンサの感度が下げられる。タスクへの寄与度が比較的低いアクティブセンサの感度が下げられることにより、アクティブセンサの相互干渉が回避され、かつ、ロボットRによる当該タスクに支障が生じる事態が回避されうる。
(もっと読む)
行動決定装置、行動学習装置、及びロボット装置
【課題】入力情報から一つの情報空間に各々モジュール化した知能的判断システムを構築することができる行動学習装置及び方法、それによって生成された学習結果を使用した行動決定装置及び方法、これらの装置を搭載したロボット装置を提供すること。
【解決手段】ロボットは、外部からの指示情報から単語を抽出する知識取得部21と、抽出した単語によりネットワークを構築し、単語間の重みを更新するネットワーク構築部22と、単語の関係性をネットワーク上で重み付けした単語ネットワークに基づき、行動を決定する行動決定部23とを有する。
(もっと読む)
作業ロボットシステム
【課題】作業ロボットシステムにおいて、簡単な構成により、限られた台数の作業ロボットのもとで、作業ロボットの不具合や、作業中の異常発生に自律的に対応して、人手によるフォローを要することなく未作業のままの領域を残さずに所定の作業を完遂することを可能とする。
【解決手段】作業ロボットシステムに1は、電池を動力源として有し作業領域まで自律的に移動して所定の作業を行う複数の作業ロボット2A〜2Dと、各作業ロボットから電池電圧を含む自己状態および作業状態の情報を受け取ると共に各作業ロボットを制御するための指示を出す中央制御装置3と、を備えている。中央制御装置3は、いずれかの作業ロボット2Cに異常が発生した場合に、異常の発生した作業ロボットとは別の、電池電圧が最も高い作業ロボット2Bを選択し、その選択した作業ロボットに異常が発生した作業ロボットの代替をさせる。
(もっと読む)
ロボット装置及びその制御方法
【課題】 ロボット間でコミュニケーションをとることができるロボット装置及びその制御方法を提供する。
【解決手段】 ロボット装置の内部状態を示す信号パターンを記憶する信号パターン記憶回路4と、他のロボット装置の内部状態を示す信号パターンを検出する信号検出回路2と、上記信号検出回路2により検出された情報と上記信号パターン記憶回路4に記憶されている情報とを信号比較回路5により比較して、上記他のロボット装置の内部状態を認識する。
(もっと読む)
ロボット制御装置及びプログラム並びにロボット制御方法
【課題】サービスを複数のロボットの連携により実施する。
【解決手段】本発明の一態様のロボット制御装置2は、ロボット51〜5nのロボット位置データ19とサービス実施中か否かを表すロボット状態データ20を記憶する記憶手段9と、ロボット51〜5nの連携によって実施されるサービスを構成するサービス要素毎の動作内容データ18aを記憶する記憶手段8と、実施中のサービス要素において引き継ぎ条件を満たすか否か判断する判断手段16と、引き継ぎ条件を満たす場合に、実施中のサービス要素から次のサービス要素に切り替わるサービス切り替え位置とロボット位置データ19との関係に基づいて、ロボット状態データ20がサービス実施中でないロボットの中から、次のサービス要素を実施するサービス引き継ぎロボットを選択する選択手段12と、動作内容データ18aに基づいて、サービス引き継ぎロボットに対して、次のサービス要素の動作命令を送信する送信手段14とを具備する。
(もっと読む)
群ロボットシステム
【課題】対象物の探索を効率的に行なうことが可能となる群ロボットシステム等を提供する。
【解決手段】ベースステーション101から遠い側に位置するセンシングロボット102,103,104が探索の対象物を検出した場合に、ベースステーション101に近い側に位置するセンシングロット102,103,104が探索の対象物を検出できるように、ベースステーション101が探索の対象物に向かって移動するとともに、それに伴って複数のセンシングロボット102,103,104が全体として移動する。
(もっと読む)
自律移動装置
【課題】通信を中継可能な自律移動装置を提供する。
【解決手段】自律的に移動する自律移動装置10において、他の装置と通信を行う通信機14と、通信手段を用いて通信目標装置と通信できるか否かを判定する通信状態判定部22と、を備え、通信状態判定部22により通信目標装置と通信できないと判定された場合に、通信ラインを構築するために移動する。また、自律移動装置10の移動により通信目標装置までの通信ラインを構築できない場合には、他の自律移動装置に通信ラインの構築を要求する。
(もっと読む)
ロボットにおける対話相手識別方法およびロボット
【課題】安価に、かつ信頼性高く、対話相手(人またはロボット)の識別、方向判別を可能とし、対話相手に応じた対話/サービスの提供を可能とすること。
【解決手段】対話ロボット10の身体(例えば胴回り)に、複数方向に向けて配置した赤外線発受信ユニット11を設け、ユーザ(人間)20はユーザの識別信号を発信する赤外線発受信ユニット21を装着する。ロボット10は、上記赤外線発受信ユニットの、どの受信器によって相手からの赤外線が受信されたかによって、対応する相手が自分からみてどちら方向にいるかを知り、また、受信した識別信号を解読することによって、対応する相手が誰かを知る。そして、ロボット10は、その顔部(頭部)あるいは身体の向きを検出されたユーザ方向に向け、識別した相手に応じた対話/サービス内容を選択し、上記相手に対して言語・非言語に基づく対話/サービスを行う。
(もっと読む)
ネットワーク・システム、移動体装置及びその制御方法、並びにコンピュータ・プログラム
【課題】 センサ機能を持つ各移動体装置が自律的に動作して自己組織的なネットワーク・トポロジを形成し、互いに取得したセンサ・データを共有する。
【解決手段】 センサ・ノードとして動作する装置は、センサと、演算処理部と、無線通信機能部と、移動機能部を備える。各センサ・ノードが得るセンサ情報をネットワーク経由で共有し、各ノードの協調動作によりターゲットの探索、焦点、及び包囲を行ない、ターゲットを動的に包囲する。時々刻々と移動するターゲットを複数のセンサ・ノードで取り囲むことで、ターゲットをさまざまな角度からセンシングして、より豊富なターゲットの情報を獲ることができる。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット12はCPUを含み、CPUはコンピュータ20から指示されたスクリプトファイルを実行する。スクリプトファイルでは、他方のロボット12から送信される実行タイミングを受信したことに応じて、少なくとも発話を含むコミュニケーション行動を実行する。また、一方のロボット12は、コミュニケーション行動を実行開始することまたは実行終了することに応じて、他のロボット12に実行タイミングを送信する。したがって、2台のロボット12は連鎖的にコミュニケーション行動を実行する。
【効果】 ロボット同士の協調した会話が可能である。
(もっと読む)
1 - 20 / 25
[ Back to top ]