
Fターム[3C007WC06]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | 人へのメッセージ伝達手段 (104)
Fターム[3C007WC06]の下位に属するFターム
会話するもの (61)
Fターム[3C007WC06]に分類される特許
1 - 20 / 43
自律移動サービス提供システム
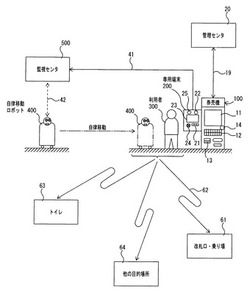
【課題】券売機等で利用者によるサービス要求の呼出行為に応じて自律移動ロボットが利用者との間の本人照合を通して迅速に対応し、作業効率を高め、かつサービスの品質を高めることができる自律移動サービス提供システムを提供する。
【解決手段】この自律移動サービス提供システムは、所定の位置に居る利用者300の要望に応じて利用者との間で音声会話または表示情報を介して通信を行う手段23,24,26、利用者に係る音声データまたは画像データを取得する手段31,32,33、音声データまたは画像データと利用者の位置データを送信する手段28を備える専用端末200と、位置データに基づいて利用者の居場所までの移動経路を自動生成する手段52、利用者との間で音声会話または表示情報を介した通信に基づき本人照合を行う手段55、利用者の要求する案内サービスを提供する手段52を備える自律移動ロボット400とから構成されている。
(もっと読む)
移動装置、移動方法およびプログラム

【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
展示品説明ロボット及びロボットを使用した展示品説明方法
【課題】説明に係る箇所を指し示すことで視覚的に説明部位を把握し易くし、さらにこのような現物上での指示と音声解説とをリンクさせる。
【解決手段】所望の方向へ移動するための自走手段11と、予め記録された所定の展示品に関する説明を音声で再生するための音声案内手段14と、展示品をレーザポインタ21で指示可能なレーザ指示装置2に対して、所定の展示品の特定の部位にレーザ光を照射するよう命令するための命令手段16と、自走手段11で所定の説明位置まで移動するタイミングと、命令手段16がレーザ指示装置2に対して、所定の展示品へのレーザ光照射命令を発するタイミングと、音声案内手段14で所定の展示品に関する説明の音声を再生するタイミングとを、予め決められた順番で相互に対応させながら実行する手順を記録した記憶手段15とを備える。
(もっと読む)
ロボットシステム、コミュニケーション活性化方法及びプログラム
【課題】引込現象の発現確率を高め、コミュニケーションをさらに活性化させる。
【解決手段】コミュニケーション場認識部1は、ユーザのバーバル情報及びノンバーバル情報に基づいて、ユーザのコミュニケーションリズムを認識する。コミュニケーション同調度合算出部2は、コミュニケーションリズムに基づいてコミュニケーション同調度合を算出する。SIRDB4は、コミュニケーションリズム及びコミュニケーション同調度合に応じて出力部5がユーザに対して行うべきインタラクション動作に関するルールを記憶する。インタラクション制御部3は、SIRDB4を参照し、そのルールに従ってコミュニケーションリズムとコミュニケーション同調度合を用いてユーザに対して行うべきロボットアクションコマンドを探索し、探索されたロボットアクションコマンドに基づいて出力部5を制御する。
(もっと読む)
コミュニケーションロボット
【課題】ユーザに対して、必要なタイミングでタッチパネルへ注目してもらうことを促進する。
【解決手段】コミュニケーションロボット11は、頭部12,胸部13,胴部14,腕部15を有して自立走行する。腕部15にはタッチパネル17を備えている。ユーザに対して、積極的にタッチパネル17を注目してもらうときには、腕部15の向きや形状を制御して、タッチパネル17の表示面をユーザ側に向け、注目を外してもらうときには、腕部15の向きや形状を制御して、タッチパネル17の表示面をユーザから外した方向に収納する。
(もっと読む)
道案内ロボット
【構成】人間に目的地までの経路を案内する際に、目的地までの経路が複雑であり難易度が高いか否かを判断する(S25,S31)。そして、難易度が高くない場合は(フラグH:オフ)、人間が容易に経路を理解できるため、腕による方向の指示と音声とによって経路を説明して案内し、難易度が高い場合は(フラグH:オン)、人間の理解を助けるため、腕による方向の指示および音声に、体の向きによる方向の指示を加えて経路を説明して案内する。
【効果】人間による理解の容易化と、道案内ロボットの体の旋回による無駄な待ち時間の発生やエネルギーの消費の防止とを両立できる。
(もっと読む)
ビートトラッキング装置、ビートトラッキング方法、記録媒体、ビートトラッキング用プログラム、及びロボット
【課題】雑音に対するロバスト性を確保するとともに、テンポ変動への追従性及びテンポ推定の安定性を確保する。
【解決手段】音楽音響信号MAから自己音声信号SVの音声成分をエコーキャンセルした音響信号にフィルタ処理を行い、オンセットを強調したオンセットベクトルを出力するSobelフィルタ部21と、オンセットベクトルに正規化相互相関関数を用いた時間周波数パターンマッチングを行ってビート間隔信頼度を求める時間周波数パターンマッチング部22と、ビート間隔信頼度に基づいてビート間隔を推定してテンポTPを出力するビート間隔推定部23とを備えた。
(もっと読む)
自律移動ロボット装置及び自律移動ロボット装置の制御方法
【課題】自律移動ロボット装置において、追随目標との間に他の歩行者などの障害物が介入して追随目標までの視野が失われそうになったり、走行経路の生成が不能となった場合においても、追随目標の追随を続行することができるようにする。
【解決手段】走行部1と、周囲の障害物201の有無を計測するとともに追随目標101の位置を計測するセンサ3と、センサ3による計測結果に基づいて障害物201のない移動可能領域を検出し追随目標101を追随する移動予定路を決定しこの移動予定路上を移動させる制御手段2とを備え、制御手段2は、追随目標101までの視界が障害物201により遮られる虞があるとき、または、遮られたときには、追随目標101までの視界を確保する動作を行うことにより、追随目標101を追随する移動予定路の決定を可能とする。
(もっと読む)
移動説明装置、および、移動説明プログラム
【課題】ロボットが、展示物に対して向けられた見物人の視線を遮らずに、展示物について説明を行うことを課題とする。
【解決手段】展示会場内の任意の点が座標(x,y,z)で指し示すことができる座標系において、展示物の見物人の位置を示す座標14や座標15を取得する。取得した座標と展示物17の位置を示す座標11を結ぶ線分が、移動説明装置13を近似した形状である円柱と交差するか否かを判定する。交差する場合には、移動説明装置13が見物人の視線を遮っているものと判断し、例えば、座標16で示される位置に移動させる。すなわち、座標16では、線分各々が円柱と交差しない。
(もっと読む)
移動体、移動体方向制御方法および移動体方向制御プログラム
【課題】音声メッセージを出力する際に通行人の関心を引くことができる移動体、移動体方向制御方法および移動体方向制御プログラムを提供する。
【解決手段】スピーカ107を備える自律移動可能な移動ロボット100において、センサ101は、検知領域内に存在する人体を検知し、回転制御部112は、移動ロボット100の移動領域における対象の位置を記憶する位置情報記憶部114に記憶された対象の位置を向いた方向に移動ロボット100を回転し、センサ101によって人体を検知した場合は、人体を検知した方向に移動ロボット100を回転し、音声出力制御部108は、回転制御部112によって移動ロボット100が回転した後に、対象に関するメッセージをスピーカ107から出力する。
(もっと読む)
コミュニケーションロボット及びその制御方法
【課題】対象者に応じて適切な発話を行うことができるコミュニケーションロボットを提供する。
【解決手段】対象者と会話によってコミュニケーションを図るコミュニケーションロボットであって、対象者の年齢及び反応に応じて発話信号の音量及び/又は周波数を制御する。コミュニケーションロボットは、対象者の年齢を判定する年齢判定部と、年齢判定部によって判定された前記対象者の年齢を入力する年齢入力部と、対象者の反応を判定する反応判定部と、反応判定部によって判定された前記対象者の反応を入力する反応入力部と、年齢入力部に入力された前記対象者の年齢及び反応入力部に入力された対象者の反応に応じて発話信号の音量及び/又は周波数を制御する発話制御部と、を有する。
(もっと読む)
移動装置およびその制御プログラム
【課題】さまざまな状況に応じて移動物体との接触を流動的に回避しながら自律的に移動または行動しうる移動装置等を提供する。
【解決手段】第1目標軌道R1が探索されえない等、第2安全条件が満たされていない場合、第1空間要素Q1を要素通行領域QSの境界に近づける第2目標軌道が探索される。暫定的な目標軌道としての第2目標軌道にしたがってロボットが通行可能領域の境界に自律的に近づき、第2目標軌道の終点に相当する位置において停止する。ロボットが第2目標軌道にしたがって移動した分だけスペースが広がるので、このスペースを通じた物体の移動を促すことができる。
(もっと読む)
自律動作型ロボットおよび自律動作型ロボットの動作制御方法
【課題】周囲の人間がロボットの認識した障害物が何であるかを容易に判断可能である自律動作型ロボットを提供すること。
【解決手段】周囲の環境情報を取得する環境情報取得部と、環境情報取得部で取得した環境情報に基づいて自律動作を制御する制御部と、制御部により動作を制御される動作部と、を備える自律動作型ロボットにおいて、取得した環境情報に基づいて周囲に存在する物体を把握するとともに、把握した物体のうち、動作部を正常に動作させる際に影響を及ぼす物体を障害物と認識する障害物認識部をさらに設け、かつ、障害物認識部により認識された障害物を特定する障害物特定情報を外部に対して視覚的に出力する出力部を、さらに備えさせた。
(もっと読む)
自律移動体、監視システム及び通信方法
【課題】誤報を防止し、利用者が案内を必要とする場合や非常事態の場合等、必要な場合にインターホン機能を有効に作動させることが可能な自律移動体の提供である。
【解決手段】自律移動体20であって、音声入力手段302と、音声出力手段と304、利用者が押下可能な操作指示部306とを有するインターホン300と、前記自律移動体にネットワークで接続された監視センタに対する報知の可否と、前記自律移動体20の巡回に関する所定条件とを対応付けた条件テーブルを記憶する条件テーブル記憶部220と、前記インターホン300の操作指示部306の押下により利用者から呼出を受けた場合に、前記所定の条件に対応した報知の可否に基づいて報知するか否かを判断する制御手段208と、前記制御手段208によって報知すると判断された場合に、前記インターホン300からの呼出を監視センタに報知する通信部200とを備えた。
(もっと読む)
コミュニケーションロボットとその動作方法
【課題】サービスを依頼し易いコミュニケーションロボットを提供する。
【解決手段】眼カメラ20が設けられた頭部52と、広視野カメラ53が設けられた胴部54と、頭部を回転させる頭部制御手段61と、コミュニケーションの成立を合図する合図動作制御手段63とを有するコミュニケーションロボットであって、眼カメラ20及び広視野カメラ53の画像を処理する画像処理手段62を有する。頭部52を所定速度で回転する見回り動作を行いながら、広視野カメラ53の画像から予め検出した人の位置で回転速度を落とし、眼カメラ20の画像からロボットに顔を向ける正面顔の人を検出し、検出した場合に合図を送る。サービスを求める人は、ロボットが見回り動作を行っていれば、サービス可能であると知ることができ、ロボットが自分の方を向いたときにロボットを見ていれば、ロボットにサービスを依頼できる。
(もっと読む)
移動型ロボット
【課題】複数の可動部または音声出力部のいずれかの部位を使用していない場合にその部位を有効に活用して対話対象の発話を誘発する行動のできる移動型ロボットを提供する。
【解決手段】ロボットは、対話対象の発話を誘発するために実行する対話誘発動作を、1つ以上の部位を使用して対話対象が知覚可能な単独の動作またはその組合せとして各部位に実行させる制御を行う対話誘発動作制御部47と、対話誘発動作とそれを実行するために使用する部位とを関連付けた情報を示す対話誘発動作情報を複数記憶した対話誘発動作情報記憶手段33とを備え、対話誘発動作制御部47は、現在使用中の部位を検出する使用状況検出手段110と、検出された部位と対話誘発動作情報とに基づいて対話誘発動作を決定する対話誘発動作決定手段120と、決定された対話誘発動作に使用する部位に対して動作を実行させる知覚可能動作制御手段130とを有する。
(もっと読む)
行動制御装置、方法、プログラム
【課題】ユーザの周囲を移動体が移動しているにもかかわらず、ユーザは特に注意を向けた時以外は、その移動体の存在を意識せずに済むことを可能とする移動体の行動を生成する。
【解決手段】行動制御装置は、移動体の活動空間における情報を収集し、人間の位置情報および方位情報を取得する。取得した人間の位置情報および方位情報に基づいて、人間について排他的空間を設定する。そして、行動制御装置は、移動体が人間に通知すべき情報があるか否かを判断する。通知すべき情報がないと判断した場合、行動制御装置は、前記人間について設定された排他的空間の領域外に移動体が位置するよう、移動体の目標位置、目標方位、目標経路を設定する。
(もっと読む)
ロボット
【課題】ユーザである人間と対話的にコミュニケーションを行う能力を向上させたロボットを低コストで提供する。
【解決手段】カメラ手段6,7によって撮影した顔画像を入力されて記憶するカード型メモリ1と、カード型メモリ1に予め記憶しておいた複数の投射画像の何れか1つを表示面に投射表示するプロジェクタ9とを備える本発明のロボット100は、カメラ手段6,7より撮影されたユーザの複数の感情状態の顔画像を予め登録する顔画像登録機能31と、予め登録された複数の感情状態の顔画像とカメラ手段6,7より入力された顔画像とを比較して、当該顔画像が対応する感情状態を判断する顔画像状態判断機能33とを備えるCPU4とを有しており、顔画像状態判断機能33によって判断された感情状態に応じて、プロジェクタ9から前記表示面に複数の投射画像の何れか1つを投射表示する。
(もっと読む)
案内ロボットの制御方法、システム、制御装置、案内ロボット、および案内ロボット制御プログラム
【課題】時々刻々変化する売り場の混雑状況に合わせて動的にロボットを配置し、買い物客を混雑した場所からすいている場所に誘導することを目的とする。
【解決手段】施設内監視装置により該施設内の状況を監視して案内ロボット制御装置に送り、案内ロボット制御装置は、予め該施設内の各場所における告知項目を保持し、該施設内監視装置から受け取った該施設内の状況を解析し、該施設内の、人の混雑している場所とすいている場所を検出し、該すいている場所の入り口を案内ロボットの配置先として設定すると共に、該保持する告知項目から該すいている場所における告知項目を選択して告知内容として設定し、該設定内容を案内ロボットに通知し、該設定内容を通知された案内ロボットは、該通知された案内ロボットの配置先に移動すると共に、該通知された内容を告知して案内することを特徴とする。
(もっと読む)
1 - 20 / 43
[ Back to top ]