
Fターム[3C007WC07]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | 人へのメッセージ伝達手段 (104) | 会話するもの (61)
Fターム[3C007WC07]に分類される特許
1 - 20 / 61
ロボットシステムおよびそれに用いる空間陣形認識装置
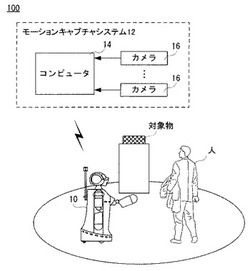
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
会話ロボット

【課題】状況に応じた自然な会話を行い得る会話ロボットを提案する。
【解決手段】会話ロボット1では、主注目対象角度θ1及び従注目対象角度θ2を算出し、これら主注目対象角度θ1と従注目対象角度θ2とを全て合算した後、認識したユーザ(ユーザA及びユーザB)の総数で除算して重心方向角度θCG1を算出し、胴体部正面8bをこの重心方向角度θCG1まで回動させる。このように、会話ロボット1では、胴体部正面8bを重心方向角度θCG1まで回動させることで、重心方向に胴体部正面8bを向けさせて、ユーザAだけでなくユーザBに対しても、あたかも注目しているかのような印象を与えることができ、かくしてユーザA又はユーザBとの間で状況に応じた自然な会話を実現し得る。
(もっと読む)
ロボット制御方法、プログラム、及びロボット
【課題】ロボットの自律動作における不自然さを軽減させる。
【解決手段】可動部を有するロボットが、センサから出力される音声データまたは画像データに基づいて、ロボットに対する対話要求を検出し、検出された対話要求を示す検出データに検出の信頼度を含めて出力し、信頼度が所定レベルより高い場合は、検出データに基づいて可動部を動作させ、信頼度が所定レベルより高くない場合は、予め登録された動作データに基づいて可動部を動作させる。
(もっと読む)
コミュニケーションロボット
【課題】本発明は、簡易な構成で、コミュニケーションが継続しやすいコミュニケーションロボットを提供することを課題とする。
【解決手段】ロボットRは、マイクMCが人物の音声を入力したときに、音声認識の結果の信頼度を出力する音声処理部20と、信頼度に基づいて回答不能行動を行うか否かの評価値として算出し、評価値が予め設定された閾値未満であるときに回答不能行動を行うと判定する応答行動判定手段471と、応答行動判定手段471が回答不能行動を行うと判定した場合、ロボットRが可能な所定の応答行動から、回答不能行動を選択する行動選択手段472と、行動選択手段472が選択した回答不能行動の実行を、スピーカSおよび可動部の少なくとも一方に指令する行動指令手段473と、を備える
(もっと読む)
ロボット、ロボット制御方法およびプログラム
【課題】姿勢に応じて、違和感のない自然な音声を出力する。
【解決手段】ロボット4は、基体(基体41)に可動連結した可動部(例えば、頭部42)の駆動を制御する駆動制御手段(制御部100)と、音声を生成する音声生成手段(音声生成部110)と、前記音声生成手段において生成された音声を出力する音声出力手段(音声出力部140L、140R)とを有し、前記音声生成手段は、前記駆動制御手段によって制御される前記可動部の前記基体に対する姿勢に基づいて、生成する音声を補正する。
(もっと読む)
ロボット
【課題】ロボットがユーザに提示した行動を発動しやすくする。
【解決手段】このロボットは、一の行動プログラムを選択する行動プログラム選択手段、行動プログラム選択手段によって選択された一の行動プログラムに設定された発動条件をみたすようにユーザを誘導する誘導情報を提示する誘導情報提示手段、行動プログラム選択手段によって選択された一の行動プログラムの発動条件の優先度を、他の行動プログラムの発動条件の優先度より相対的に上げる優先度設定手段、優先度設定手段によって変更された一の行動プログラムを含む複数の行動プログラムの優先度に応じ、複数の行動プログラムの発動条件のパラメータを変更するパラメータ変更手段、及びパラメータ変更手段によってパラメータが変更された発動条件に従って、当該発動条件がみたされているか否か判定する判定手段を備える。
(もっと読む)
領域分割装置、領域分割プログラムおよび領域分割方法ならびにコミュニケーションロボット
【構成】 ロボット10はCPU60を含み、CPU60は、グリッドマップを用いて、オブジェクトに接触しない領域を抽出したり、オブジェクトのみならず床の模様に接触しない領域を抽出したりする。ロボット10は、抽出(分割)された領域のうち、人間のリクエストに応じた1の領域を選択して、選択した領域の大きさや選択した領域との位置関係に応じて、発話内容を決定するとともに、ジェスチャを決定する。そして、ロボット10は、指示語や特定のオブジェクトに対して設定された相対言語表現によって発話するとともに、指差しの動作を実行して、選択された領域を人間に指示する。
【効果】 人間と同様に領域を分割し、人間と同様にその1つを指示することができる。
(もっと読む)
頭部動作制御情報生成装置
【課題】ロボットと人間とのコミュニケーションをより円滑にできるよう、ロボットの頭部の動きを制御する頭部動作制御情報生成装置を提供する。
【解決手段】頭部動作生成装置86は、ヒューマノイド型ロボットの頭部の動きを、当該ロボットが発生する音声に同期して制御する制御情報を生成する装置であり、句ごとに付されている談話機能タグごとに、複数の頭部動作をどのような確率で実行するかを規定する確率モデル群100と、入力された句に付された注釈に基づいて、確率モデル群100の中から確率モデルを選択し、選択された確率モデルにしたがった確率で、入力された所定の単位の音声データに対応する頭部動作コマンドをロボットの制御部90に出力する頭部動作コマンド生成部104を含む。
(もっと読む)
制御情報生成装置および形状制御装置
【課題】音節の発音内容を規定した発音情報に基づいて、口を模した部分を持つ装置における口の形状を変化させる制御を行いながらも、口の形状の変化を自然なものにすること。
【解決手段】本発明の実施形態に係る形状制御システムにおいては、発音装置および口を模した部分を有する形状変化装置を、形状制御装置を用いて制御する。形状制御装置は、発音情報に基づいて発音装置を制御するとともに、発音情報から制御情報を生成して、この制御情報を用いて形状変化装置を制御する。形状制御装置は、発音情報から制御情報を生成するときに、口の形状が変わるときにおける変化前から変化後までの遷移時間を示す遷移情報を、予め決められたアルゴリズムに従って決定する。そして、形状制御装置は、口の形状が変化させるときには、遷移時間で徐々にその形状が変化するように形状変化装置を制御する。
(もっと読む)
音声合成装置、ロボット装置、音声合成方法、及び、プログラム
【課題】ロボット装置の実際の動作と同期した音声を合成することが可能な音声合成装置を提供すること。
【解決手段】音声合成装置100は、予め定められた動作を行うロボット装置に適用され、且つ、処理対象となる文字列である処理対象文字列に基づいて当該処理対象文字列を表す音声である処理対象音声を合成する音声合成処理を行うように構成される。音声合成装置100は、上記処理対象文字列の少なくとも一部である動作付随文字列と対応付けられた動作を上記ロボット装置が実行するために要する時間である動作実行時間を取得する動作実行時間取得部101と、上記取得された動作実行時間に亘って発せられる音声であって、上記動作付随文字列を表す音声である、動作付随音声を含む上記処理対象音声を合成する上記音声合成処理を行う音声合成処理実行部102と、を備える。
(もっと読む)
対話支援装置、対話支援方法およびプログラム
【課題】対話を支援する対象者に注意を向けていることを表示するときに、対象者の違和感を緩和できる対話支援装置、対話支援方法およびプログラムを提供する。
【解決手段】動作判定部14は、位置センサ12のデータから対話を支援する対象者の所定の動作を表す情報を取得する。カメラ13および雲台18は、カメラ13を対象者に向けることによって、対象者に注意を向けていることを対象者に向かって表示する。開閉表示部19は、カメラ13のレンズを閉じることによって、対象者に向けている注意を中断していることを表示する。コミュニケーション動作入力部11は、対象者のコミュニケーション動作を表す情報を入力する。注意表示切替制御部15は、対象者に注意を向けている表示と、対象者に向けている注意を中断している表示とを、対象者の動作を表す情報および/または対象者のコミュニケーション動作を表す情報に応じて切り替える。
(もっと読む)
コミュニケーションロボット開発支援装置
【構成】 コミュニケーションロボット開発支援装置(10)は、コミュニケーションロボット(12)の開発を支援するためのものである。シーケンス表示手段は、行動モジュールの遷移を最上位であるメインシーケンスとそれより下位のサブシーケンスとに階層化し、メインシーケンスに対応するメインシーケンス画面312とサブシーケンスに対応するサブシーケンス画面314とをそれぞれ個別に表示する。たとえば、メインシーケンス画面312では、行動モジュールに対応するビヘイビアアイコン304、サブシーケンスに対応するシーケンスアイコン320、およびアイコン間を連結して行動モジュールの実行順序を示す遷移線306に基づいて、メインシーケンスが作成される。また、たとえば、サブシーケンス画面314では、ビヘイビアアイコン304と遷移線306とに基づいて、サブシーケンスが作成される。
【効果】 複雑な行動モジュールの遷移を簡単に設定することができる。
(もっと読む)
コミュニケーションロボット
【課題】コミュニケーション対象との親密度に応じて多様なコミュニケーション行動を実行することができるコミュニケーションロボットを提供する。
【解決手段】コミュニケーションロボットは、一連の行動プログラムからなる行動モジュールを実行することによってコミュニケーション行動を取るものであり、対象となるユーザとの親密度を記憶したユーザ親密度記憶手段と、ユーザとの対話距離、ユーザとの接触状況、ユーザの顔の表情、ユーザの視線の位置などユーザの現在の反応をセンシングしたセンシング情報に基づいてセンシング親密度を算出するセンシング親密度算出手段と、ユーザ親密度とセンシング親密度とに基づいてコミュニケーション親密度を算出するコミュニケーション親密度算出手段と、コミュニケーション親密度に対応付けた行動を実行するときの行動モジュール実行情報が記憶されている行動モジュール実行情報記憶手段を有する。
(もっと読む)
道案内ロボット
【構成】道案内ロボット(10、100)は複数の文を発話して利用者に道を案内するものである。そして、時間決定手段(62、S19、S69)は文の内容を利用者が把握するために必要な時間を決定する。また、発話手段(62、72、54、S35、S41、S85、S97)は文の発話の完了後に、時間決定手段が決定した時間の後で次の文を発話する。
【効果】道案内ロボットによる道案内の内容を利用者が正しく充分に把握することができる。
(もっと読む)
ロボットシステム
【課題】 音声対話システムをロボットに組み込んだ場合、ロボットが大きくなり、持ち運びに不便で、しかも、落下させた際、水没させた際に、損傷が大きい。
【解決手段】 音声対話システムを構成するマイク17、スピーカ21、音声認識ボード55、対話処理部71のうち、マイク17、スピーカ21が被対話体(機体11または可動ユニット15A)に備えられ、音声認識ボード55、対話処理部71がサーバ13に備えられるようにし、被対話体とサーバ13との間を有線または無線で接続した。
(もっと読む)
人型ロボット
【課題】特定個人に似顔、似声により情報を伝達する人型ロボットにおいて、音声を発する際の動きのなかに、特定の話者の個性を表現することにより、話者が伝達しようとする愛情などを演出できる人型ロボットを提供する。
【解決手段】特定個人に似顔のロボット本体(1)の内部に搭載したストレージ(3)にあらかじめ特定個人の声を収録し発話するために必要となる五十音等の音素データや特定個人の癖となる動作データ等を登録し、発話時にその音声を制御部(2)内のメインCPUユニット(211)により合成して、スピーカ(26)より出力し、同時にアクチュエータ(9)〜(25)を四肢動作させる。
(もっと読む)
情報処理システム、プログラム及び情報記憶媒体
【課題】ユーザの日常度を利用した情報処理や情報提示を可能にする情報処理システム等の提供。
【解決手段】情報処理システムは、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つのセンサからのセンサ情報を含む情報に基づいて、ユーザの状況を推定する状況推定部と、ユーザの状況履歴情報を記憶する履歴情報記憶部と、ユーザの日常度を評価する処理を行う日常度評価部と、日常度評価部の評価処理により得られたユーザの日常度を、ユーザの状況履歴情報の各ユーザ状況に関連づけて履歴情報記憶部に書き込む書き込み部を含む。
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
ロボット遠隔操作システム
【構成】ロボット遠隔操作システム10は、中央制御装置14を含み、この中央制御装置14は、ロボット12からの呼出要求があると、ロボット12の対話相手から言語および文化を特定するときに、IDLE状態のオペレータを選択する。選択されたオペレータは、操作端末16によってロボット12を遠隔操作する制御コマンドを中央制御装置14に送信する。中央制御装置14は、制御コマンドを受信すると、制御コマンドに含まれる動作コマンドを対話相手の文化に対応する動作に変換し、発話コマンドを対話相手の使う言語に翻訳して、ロボット12に送信する。すると、ロボット12は、対話相手の文化に併せてコミュニケーション行動を行う。
【効果】対話相手の文化に併せてロボット12がコミュニケーション行動を行うため、対話相手の文化によらず、オペレータが適切に対応することができる。
(もっと読む)
動作生成装置、ロボット及び動作生成方法
【課題】発話内容に応じて身振り動作の処理速度を調整する動作生成装置を提供する。
【解決手段】動作生成装置20は、発話内容と発話内容に応じて動作パターンが動作する動作タイミングを保持する発話内容データベース2と、動作パターンに対応する動作データを登録する動作パターンデータベース8と、発話内容データベース2から発話内容を選択する発話内容生成部3と、選択された発話内容に応じて、説明に必要な動作パターンを判断する動作種別判断部7と、判断された動作パターンに基づいて、動作パターンデータベース8から動作データを抽出し、発話内容と動作データとを組み合わせる動作パターン組合わせ生成部9と、発話内容に応じた動作タイミングに基づいて、動作データの再生処理速度を調整する動作処理速度調整部10と、を備える。
(もっと読む)
1 - 20 / 61
[ Back to top ]