
Fターム[3C041AA06]の内容
Fターム[3C041AA06]の下位に属するFターム
フィーラーを持たないもの (2)
フィーラーが工具より先行するもの (2)
Fターム[3C041AA06]に分類される特許
1 - 13 / 13
加工ロボットの軌道追従装置と方法
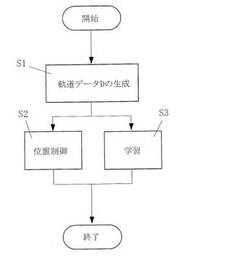
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
倣い装置

【課題】 ワークの形状に対して、適応度の高い倣い装置を提供するにある。
【解決手段】 ワーク100に接するシュー1と、シュー1がワーク100に接する面上の点を旋回中心として、シュー1を円弧状に旋回させる円弧スライドガイド5Aと、円弧スライドガイド5Aと同じ旋回中心で、円弧スライドガイド5Aと直交する方向にシュー1を円弧状に旋回させる円弧スライドガイド5Bとを備えた倣い装置。
(もっと読む)
ワーク把持装置と加工装置
【課題】 ワークの加工位置への搬入・搬出を高速化して加工に要する時間を短縮することが可能なワーク把持装置とそのようなワーク把持装置を組み込んだ加工装置を提供すること。
【解決手段】 ワークを把持するワーク把持爪部を開閉自在に備えたワーク把持手段と、上記ワーク把持手段に対して選択的に連結され上記ワーク把持爪部を開閉駆動する駆動手段と、を具備したものであり、それによって、ワークの搬入・搬出動作が迅速化されることになり、加工に要する時間を大幅に短縮される。
(もっと読む)
倣い加工装置
【課題】リング状被加工物の弧状内周面の切削加工を、被加工物の位置決め固定の精度に依らず精度良く実施でき、かつ切削量を管理でき、1回の切削作業で済むようにする。
【解決手段】被加工物3を加工位置に固定する平面状の固定面1aを有する固定盤1と、切削具10及び倣い具22が装着され該切削具及び倣い具を被加工物3の周方向f、gに沿った曲線移動を可能にするとともに、該切削具及び倣い具を被加工物3の周方向f、gと交差する径方向jに位置調整可能に支持するアーム6と、該切削具及び倣い具を被加工物の周方向と交差する径方向にバネ力を付与することによって該倣い具を被加工物外周面に押し付けるバネ力付勢手段とを備え、被加工物の外周面3bを倣い面とし、倣い具22を該外周面に押し付けながらアーム6を被加工物3の周方向f、gに移動させることにより被加工物3の内周面4aを切削加工するように構成した。
(もっと読む)
倣い加工機における倣いローラの駆動機構
【課題】 倣いローラによってワークの表面をトレースしながら所定の加工を実行する倣い加工機において、倣いローラの追従圧力を一定値に維持しながら、ワークの表面状態不良に起因する倣いローラの短周期の変位を吸収することによって、倣いローラの駆動系に対する過負荷を防止するとともに、安定な加工を実現する。
【解決手段】 倣いローラR1をXY方向について位置決め駆動する倣いローラR1の駆動系に、原点位置復帰機能を有する水平方向緩衝装置30と上下方向緩衝装置50を介装し、倣いローラR1からのXY方向のリアクションを必要な追従圧力を大幅に変化させることなく吸収する。
(もっと読む)
形鋼の加工方法および装置
【課題】圧延または溶接により製造された形鋼に、高能率かつ高精度で切断や切削等の加工を施して、寸法精度に優れた形鋼を得る。
【解決手段】フランジ2b幅方向の位置決め機構5を備えた加工具7と、ウエブ2aを両側面から挟み込むようにウエブ2aの両側に対向配置された一対の倣い治具4と、これら加工具7と倣い治具4を搭載して形鋼2の長さ方向に移動させる移動台車3とからなる形鋼の加工装置1用い、フランジ2b幅方向の位置決めを行った加工具7を、位置決め状態を維持しながら、前記倣いに伴って形鋼2の長さ方向に移動させてフランジ2b部の加工を行う。
【効果】大掛かりな装置を用いることなく、形鋼のフランジ幅のサイズダウンを、寸法測定や装置の調整にほとんど時間をかけずに高精度に実施することができる。
(もっと読む)
切断工具
【課題】ワークに対する切断加工を簡便かつ適切に行うことができる切断工具を提供すること。
【解決手段】切断工具1は、刃部12を超音波振動させることにより、ワーク3に対して刃部12を用いた切断加工を行う切断工具本体2と、この切断工具本体2における刃部12の近傍に配設され、切断加工の際にワーク3に接触することによってワーク3の切断深さを規制する倣いガイド部材23とを備えている。
(もっと読む)
面状発光体の精密加工とその製造方法
【課題】 輝度が高く、照度ムラが無く均一に中心部まで導く面状発光体を容易に量産可能にする精密加工装置を提供する。
【解決手段】車状又はローラ状の面状発光体部材16の表面粗さ検知器15と切削バイト14を同一の収納体で構成したユニット13を構成する。バイト収納ユニット11と13の間にバネ材12を設けてクッションにする。15の車状の表面検知器は導光板部材16表面の凹凸によって上下する。バイト14は同一のユニット13に収納してあるから、導光板表面の粗さに応じて正確に上下する。12のバネ材はクッションになってV字溝の深さを精度よく均一に保って彫れるから高品質に面状発光体を製造できる。
(もっと読む)
面取機
【課題】ワークに傷が入らず、接触子の動く方向と面取の稜線との交差角(歯車の圧力角)が小さい場合でも容易に面取りが出来、ワークが変わっても接触子の交換が不必要で、接触子の磨耗が少なく、耐久性の高い面取機を提供する。
【解決手段】基台上に、ワークを保持し回転駆動する保持回転移動装置と、保持回転移動装置の回転軸と平行で、パルス発生器が設けられた回転軸に一定距離はなれた位置に設けられた接触子と、保持回転移動装置の回転軸と平行でパルス駆動モーターにより回転駆動される回転軸に一定距離はなれた位置に設けられた刃物を着装した回転工具を設け、接触子が取り付けられた回転軸にトルクを与えることで接触子が回転運動してワークに接触し、ワークを回転する事で接触子がワークに沿って動き、その回転軸も揺動し、それに設けられたパルス発生器から発生するパルスで回転工具が着装された回転軸を回転駆動するパルス駆動モーターを駆動する。
(もっと読む)
加工装置
【課題】 加工の高速化に対して、構成を複雑化させることなく且つ大型化させることなく容易に対応することが可能な加工装置を提供すること。
【解決手段】 基台と、基台に設けられワーク9を保持して回転させるワーク保持・回転手段と、基台に設けられ上記ワークに向かう方向に進退自在に構成されると共にスピンドルを回転自在に備えた加工工具ユニットと、加工工具ユニットのスピンドルの先端部に取り付けられた切削用チップ41と、加工工具ユニットのスピンドルの下端に上記切削用チップに近接した状態で同軸状に取り付けられワークの形状を倣うスタイラス51とを具備したもの。
(もっと読む)
被加工物倣い用スタイラス
【課題】 回転方向に直交する方向に対して傾斜角度が小さいような部位、或いは角部等に対しても有効に対応してこれを倣うことができ、加工の高速化に容易に対応することを可能にする被加工物倣い用スタイラスを提供すること。
【解決手段】 加工工具ユニット又は該加工工具ユニットを含んだヘッド部に着脱可能に取り付けられると共に回転する被加工物に押し当てられてその形状を倣うことにより上記加工工具ユニット又は該加工工具ユニットを含んだヘッド部を進退させるスタイラス本体と、上記スタイラス本体の先端に上記スタイラス本体より幅狭の状態で一体に又は別体に設けられた倣い部材と、を具備したもの。
(もっと読む)
分岐管接続開口の孔明け加工装置および加工方法
【課題】 既設配管への分岐管接続のための開口を切削加工できる装置を提供する。
【解決手段】 ケーブル収容配管の側壁に分岐管の接続用開口を加工するための装置である。ケーブル収容管に装着されてその外周面を転がり接触可能な円筒スリーブ20に切削機を装着して前記収容管の外周面に倣い移動させて前記切削機による切削箇所を任意に移動可能とする。前記ケーブル収容管に固定され前記切削機22もしくは切削機装着部を周回案内可能な立体ガイドレール18を設け、当該立体ガイドレールを前記ケーブル収容管に形成すべき分岐管の接続用開口に倣う3次元立体形状として前記切削機の倣い移動を可能とした。
(もっと読む)
仕上げ加工装置
【課題】 バリ取り動作の無駄を少なくし、かつ削りすぎをも防止できる仕上げ加工装置を提供する。
【解決手段】 被加工ワークのバリ取り表面に対して、力制御を用いて加工ツールを押し付けて、該表面を倣い、表面形状の位置データを求める(S1)。又、ロボットの撓みによる誤差をこの位置データに対して補正する(S2)。得られた位置データとCADから得られたバリ取り表面形状の目標形状とを比較する(S6,S10)。表面形状の法線方向のずれを求める(S7,S11)。ずれの開始位置(S8)と終了位置及びそのずれの大きさによって、バリの発生開始位置と終了位置、その高さを求める(S14)。バリの終了位置と開始位置を結ぶパスとバリを除去する切削パスからなる加工プログラムを作成し、実行する(S16,S17)。バリ位置を求めそのバリ位置まで移動してそのバリを除去するので、効率よくバリ取りができる。
(もっと読む)
1 - 13 / 13
[ Back to top ]