
Fターム[3C269EF87]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムされた作業のための準備動作 (406)
Fターム[3C269EF87]の下位に属するFターム
作業原点復帰動作 (45)
各種構成要素の校正動作 (66)
作業対象との相対位置の認識 (89)
各種補正量の認識 (165)
作業済み対象の検査 (13)
その他 (25)
Fターム[3C269EF87]に分類される特許
1 - 3 / 3
非真円形穴加工方法および非真円形穴加工装置
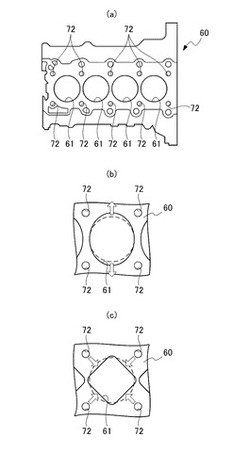
【課題】高速かつ高精度でワークを加工できる非真円形穴加工方法を提供すること。
【解決手段】非真円形穴加工方法は、シリンダブロックに既に形成された断面非真円形状のボアと同一形状のボアを、シリンダブロックに形成する。すなわち、既に形成されたボア軸線上に複数の測定点を設定し、これら複数の測定点それぞれでのボアの内径形状を測定して、内径形状データとして取得する内径形状データ取得工程と、内径形状データを周波数解析し、0次からn次(nは自然数)までの周波数成分の振幅値および位相値を分析内径形状パラメータとして算出する分析内径形状パラメータ算出工程と、前記内径形状パラメータを、加工装置の電子記憶媒体に記憶させる分析内径形状パラメータ記憶工程と、を備える。
(もっと読む)
ロボットの教示再生装置および教示再生方法

【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
加工材の幾何学的形状を検知するためのシステム及び方法
本発明は、加工材(1)の幾何学的形状を加工材の加工のため検知するためのシステム及び方法の関する。加工材(1)の加工のための製造計画の最適化を容易にするため、システムが、加工ステップ前の加工材(1)の少なくとも1つの画像を発生させる少なくとも1つのカメラ(2)、加工ステップ後の加工材(1)が有すべき目標幾何学的形状値のためのメモリ領域、加工ステップ前の加工材(1)が有する加工材幾何学的形状値を少なくとも1つの画像に基づいて決定するための決定手段、及び加工材幾何学的形状値と目標幾何学的形状値との間の差を記述する幾何学的形状差値(3)を計算するための計算手段を有する。  (もっと読む)
(もっと読む)
1 - 3 / 3
[ Back to top ]