
Fターム[3C269EF88]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムされた作業のための準備動作 (406) | 作業原点復帰動作 (45)
Fターム[3C269EF88]に分類される特許
1 - 20 / 45
機械における原点位置調整方法および原点位置調整機能を有する機械
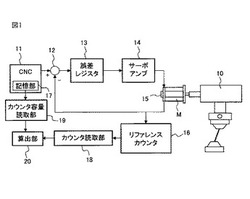
【課題】作業時間を短くしつつ、原点位置をさらに容易に設定する。
【解決手段】位置検出器を備えたサーボモータによって駆動される可動部(10)の機械原点位置調整機能を有する機械は、位置検出器により検出された値をカウントするレファレンスカウンタ(16)と、可動部を所定の方向に移動させて機械原点位置に位置決めしたときのレファレンスカウンタの容量を記憶した記憶部(17)と、可動部を位置決めしたときのレファレンスカウンタの値を読み取るレファレンスカウンタ読取部(18)と、レファレンスカウンタのカウンタ容量を読み取るカウンタ容量読取部(19)と、レファレンスカウンタの値とレファレンスカウンタ容量とに基づいて機械原点位置の調整量を算出する調整量算出部(20)と、を含む。
(もっと読む)
6軸ロボットの軸間オフセット検出方法

【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、先端2軸直交点(第5軸と第6軸との交点)をロボット座標のX軸上の複数の移動目標位置(白抜き丸印)に移動させる。各移動目標位置で、発光ダイオードを第6軸を中心に回転させてその回転軌跡を3次元計測器により計測すると共に、発光ダイオードを第5軸を中心に回転させてその回転軌跡を3次元計測器により計測する。そして、2つの回転軌跡から2つの回転中心線を求め、両回転中心線の交点を先端2軸直交点の実際の移動位置(×印)とし、移動目標位置と実際の移動位置との誤差から軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】ロボットアームの先端のフランジに発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、手先が正しく移動目標位置に移動したときの発光ダイオードの位置と実際の移動位置とを基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
ロボットの関節の原点補正方法およびそのシステム
【課題】高精度且つ安価にロボットの関節を原点補正する。
【解決手段】第1の姿勢P1(l)のロボット12のマーカー22が撮影画像に写る位置にカメラ16を設置する。各関節用のエンコーダの出力値に基づいて、原点補正対象の関節12lに予め対応付けされた関節のみを動かすことにより、カメラ16の撮影画像上において第1の姿勢時のマーカー22の位置の近傍にマーカー22が写るような第2の姿勢P2(l)に変更する。ロボット12の姿勢変更によるカメラ16の撮影画像上におけるマーカー22の変位に基づいて、原点補正対象の関節12lの原点補正を行う。
(もっと読む)
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
6軸ロボットの4軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの5軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて4軸の原点位置を適切に較正できる6軸ロボットの4軸原点位置較正方法を提供する。
【解決手段】垂直多関節型の6軸ロボットについて、6軸の軸心の延長線上に計測点を定めるための計測補助具を取り付け、5軸を4軸の軸心の延長線から所定の角度θ5_1だけ回転させて計測点を第1計測位置に移動させ(S1)、第1計測位置をレーザー変位計により計測すると(S2)、5軸を、4軸の軸心の延長線から上記の回転方向とは逆方向に角度θだけ回転させる(S3)。次に、少なくとも6軸を固定して、計測点を、第1計測位置と同じ位置となる第2計測位置に移動させ(S4)、第2計測位置をレーザー変位計により計測すると(S5)4軸の誤差角度Δθ4を(4)式で求め(S6)、誤差角度Δθ4を用いて4軸の原点位置を較正する(S7)。
(もっと読む)
制御装置、産業用ロボット、座標系の再現方法、及びプログラム
【課題】座標系を設定した後にその座標系の設定に用いた基準位置データが消失した場合にも、容易にその座標系を再現することを可能にする。
【解決手段】制御装置10が、基準位置データを記憶するための基準値記憶部10aと、制御対象の所定の運動軸を所定の位置に変位させた状態で位置の検出を行うことにより位置データを取得しそれを保存する基準取得部(第1基準取得部12a、第2基準取得部13a)と、上記位置データと基準位置データとに基づいて座標系を設定する第1座標系設定部12と、基準位置データに対する位置データの相対データを取得しそれを保存する相対値取得部(第1座標系設定部12)と、基準位置データが消失したか否かを判断する判断部13cと、基準位置データが消失したと判断された場合に、上記検出により位置データを取得し、その位置データと上記相対データとに基づいて、座標系を再現する第2座標系設定部13と、を備える。
(もっと読む)
6軸ロボットの6軸原点位置較正方法、6軸ロボットの制御装置、7軸ロボットの7軸原点位置較正方法及び7軸ロボットの制御装置
【課題】大型の検出器具を設置したりする必要がなく、6軸ロボットについて6軸の原点位置を適切に較正できる6軸ロボットの6軸原点位置較正方法を提供する。
【解決手段】設置面に、上方に位置する測定対象物との距離を測定するレーザー計測器を設置し、6軸の軸心に測定板を取り付ける。そして、6軸ロボットの2軸を1軸の軸心に対して90度回転させ、4軸の軸心が1軸の軸心と平行となるように3軸を前記設置面の方向に回転させ、6軸の軸心が前記設置面と平行となるように5軸を回転させた姿勢を取らせた状態で、測定板の一端側が第1計測点となるように位置させると(S1)、レーザー計測器により第1計測点までの第1距離L1を測定する(S2)。次に1軸を回転させて、測定板の他端側が第2計測点となるように位置させ(S3)、レーザー計測器により第2計測点までの第2距離L2を測定すると(S4)、6軸の誤差角度Δθ6を(1)式で求め(S5)、誤差角度Δθ6を用いて6軸の原点位置を較正する(S6)。
(もっと読む)
加工部品の生産方法
【課題】少量多種の加工部品を大量生産に準じた効率で生産できるようにする。
【解決手段】長手方向に複数の加工部品を一定幅の切断代を介在させて加工してなるマルチ加工ワークAを、回転主軸7と軸直角方向に相対移動可能にした切断装置のテーブル8上に固着されるワーク切断用治具9に、回転主軸と平行に、かつ軸方向に位置調整可能に支持し、ついでテーブルまたは回転主軸を軸直角方向に相対移動して、ワーク切断用治具上のマルチ加工ワークの先端側の切断位置を回転主軸の側方に設けたカメラ25にて撮像し、その撮像により得られるワークデータをあらかじめ設定したワークデータと照合し、この照合データに基づいてワーク切断用治具上のマルチ加工ワークを軸方向に移動して、このマルチ加工ワークの先端側の切断位置が回転主軸に取り付けた回転刃2による切断位置になるように位置調整し、ついでテーブルまたは回転主軸を直角方向に相対移動する。
(もっと読む)
工作機械の加工基準位置の設定方法
【課題】回転テーブルを有する工作機械において、回転テーブルの回転軸中心位置や基準位相を確実に設定することができる工作機械の加工基準位置の設定方法を提供する。
【解決手段】マスタ部材100を回転テーブル50に設置しておく。そして、回転テーブル50の位相を任意の位相と、当該任意の位相から180°回転させた位相のそれぞれにおいて、砥石台20に取り付けられた砥石車30を、所定方向から移動させて接触した位置に基づいて、回転テーブル50の回転軸中心位置を設定する。
(もっと読む)
ロボットのキャリブレーション方法及びロボット用キャリブレーション装置
【課題】ロボットの作業効率、運用効率の低下等を招くことなくキャリブレーションの簡易な実行を可能にするロボットのキャリブレーション方法、及び該キャリブレーション方法の実施に用いられるロボット用キャリブレーション装置を提供する。
【解決手段】ロボットのキャリブレーション方法では、スカラーロボット11に対する相対位置の固定された治具12に対してその座標系の基準位置を示す位置確認孔43A,43Bを予め設けておき、スカラーロボット11の先端部に取り付けられた画像認識用のカメラ33により前記位置確認孔43A,43Bを認識するとともに、該認識された位置確認孔43A,43Bの位置に基づいてスカラーロボット11の先端部の座標系を調整するキャリブレーションを行なう。
(もっと読む)
NC工作機械による成形加工方法
【課題】NC工作機械によるワークに対する成形加工において、プログラムが設定する座標上の原点を容易に選択し、かつ特定し得るような方法を提供すること。
【解決手段】NC工作機械によって、ワークに対する成形加工を行うに先立ち、加工前のワークにおける表面上の2点を選択し、当該2点の中心位置、又は当該ワークの表面上に位置し、かつ同一平面上にある4点を選択し、相互に隣接していない配置関係にある2点を結ぶ対角線同士の交点の位置を、プログラムが予め設定している座標の原点とし得る数値情報を、前記プログラムの作動に関与しているコンピュータに入力することによって前記課題を達成し得るNC工作機械による成形加工方法。
(もっと読む)
数値制御装置
【課題】一時的に記憶していた各ステージの位置情報が失われても、移動対象物同士が衝突することなく、各ステージを原点位置に復帰させる。
【解決手段】XYステージ103にワークWを保持したワーク保持具101が支持されている。XYステージ103は、回転ステージ105に支持されている。一方、測定器117が回動する測定器ステージ115に支持されている。数値制御装置は、ワークW及びワーク保持具101と測定器117との相対的な位置関係を保持した状態で同一方向に回動させ、いずれか一方が回動端で検出された後、反対方向に回動させる。反対方向に回動させる際には、回動量を検出しておく。この動作によりワークW及びワーク保持具101と測定器117との相対的な位置関係を判別する。そして、この判別した位置関係に対応する予め記憶している初期化パターンに従って、XYステージ103を原点位置に復帰させる。
(もっと読む)
バックラッシュ算出装置、観察システム及びバックラッシュ算出プログラム
【課題】ヒステリシス特性を有するセンサを用いる場合でも正確なバックラッシュ値を算出する。
【解決手段】バックラッシュ算出装置は、センサプレート323が正転方向D1に移動する際に原点センサ324がセンサプレート323に反応してから反応しなくなるまでのセンサプレート323の移動量を示す値Cに基づいて、原点センサ324の反応状態がOFFからONに切り替わる位置と中心位置との間の距離を示す値xと、原点センサ324の反応状態がONからOFFに切り替わる位置と中心位置との間の距離を示す値yとを算出し、センサプレート323が逆転方向D2に移動する際に原点センサ324がOFFしてからONするまでのセンサプレート323の移動量を示す値zと、算出されたx、yとに基づいて、バックラッシュ値を算出する。
(もっと読む)
X−Y直交2軸駆動機構
【課題】ロストモーションが最も顕現化する側にリニアスケールを配置してロストモーションを補正することができるようにしたX−Y直交2軸駆動機構の提供。
【解決手段】一側駆動ユニット13と、ワーク部材30であるコンタクトピン31を備えて一側駆動ユニット13に搭載される他側駆動ユニット23とからなり、一側駆動ユニット13が備える一対の一側リニアガイド18,19のうち、ロストモーションが最も顕現化する側にある一側リニアガイド19の内側近傍位置には、予め定めてある原点位置との関係でコンタクトピン31の実座標位置を理論座標位置に一致させるためのパルス指令を発するリニアスケール33を設置し、該パルス指令により一側駆動ユニット13が備える一側サーボモータ15の回転を制御することで、コンタクトピン31の位置をロストモーションを加味して調整可能とした。
(もっと読む)
位置決め制御装置及び位置決め制御方法
【課題】初期状態に関係なく位置ズレを補正できる位置決め制御装置を提供すことを目的とする。
【解決手段】 第1の速度で全軸同時に原点方向に移動させ全軸の原点ドグ信号検出にて全軸同時に減速停止させる第1の減速停止手段S05と、原点方向と逆方向に、第1の速度より遅い第2の速度にて全軸同時に移動させる逆方向移動手段S06と、全軸のドグ前進端を検出して各軸のドグ前進端位置を記憶部に記憶し、全軸同時に減速停止する第2の減速停止手段S08と、検出された各軸のドグ前進端位置に基づき、マスタ軸を基準とする各スレーブ軸の原点ドグ信号ズレ量を算出し記憶部に記憶する原点ドグ信号ズレ量算出手段S09と、各スレーブ軸の原点を原点ドグ信号ズレ量にて補正して各軸を原点に移動させる原点復帰手段S10とを備えている。
(もっと読む)
工作機械に対してワークの供給及び取り出しを行うロボットを制御するロボット制御装置
【課題】ロボットと工作機械を組み合わせて使用する加工システムにおいて、工作機械に関連する作業のためにロボットの動作を停止させる必要性を低減させ、作業効率を向上させる。
【解決手段】ロボット制御装置18は、ロボット制御装置18の操作を行うための持ち運び可能な教示操作盤46を備え、ネットワークケーブル42によって工作機械制御装置20,22と接続されている。教示操作盤46は、様々な情報を表示するための表示器を有し、工作機械制御装置20,22からネットワークケーブル42を介して取得した工作機械14,16に関する情報を教示操作盤46の表示器の工作機械用画面上に表示するように構成されている。
(もっと読む)
ロボット、及びオートゼロイング方法
【課題】作業員の手を介することなく自動的に基準姿勢を原点姿勢に調整することができ、また基準姿勢を原点姿勢に精度よく調整することができるロボットを提供する。
【解決手段】搬送ロボット22は、角変位可能に連結された連結部材27,28,29を備え、調整可能な基準姿勢を基準として各連結部材27,28,29の変位を制御する。基台23にはレーザセンサ38を備える。レーザセンサ38は、予め定められた方向にレーザ光を投光し、且つ原点姿勢と一致する第1の検出姿勢に第1の連結部材27が配置されると、投光したレーザ光がリフレクタ41で反射された反射光を受光するようになっている。制御部はレーザ光がリフレクタで反射しレーザセンサ38で受光するように第1の連結部材27を角変位させる。受光した時の第1の連結部材27の姿勢を原点姿勢とする。連結部材28,29についても、リフレクタ42,43を用いて同様に原点を調整する。
(もっと読む)
ロボットのツール座標系の較正方法及びその治具
【課題】専門知識を持たない作業員や熟練度が低い作業員であっても、ロボットのツール座標系の較正作業を、ロボットに近づかずに精度良く行えるようにすること。
【解決手段】ロボット1のフランジ部9に取り付けたエンドエフェクタ17に、エンドエフェクタ17のツールセンターポイントTCP上に位置する部分を有するアタッチメント21をチャッキングさせる。また、ロボット1の設置面Aに固定した伸張式変位センサ19の繰り出し口19cから繰り出されたワイヤ19aの先端を、アタッチメント21の接続点Tに接続する。ロボット1の基台3に設定されるロボット原点Oに対する、伸張式変位センサ19の繰り出し口19cに設定される測定原点Mの位置ベクトルを示す方程式を、ロボット1のNパターンの姿勢分取得する。その連立方程式を解いてツール座標系の較正を行う。Nパターンの数は、連立方程式中の変数の数に応じて決定する。
(もっと読む)
原点サーチ支援装置及びプログラム
【課題】 制御装置がどのように原点サーチ動作を実行するのか、実際に動作させることがなく知ることができ、マニュアルを参照する手間や実際に動作させ検証する時間を短縮でき、原点サーチ関連パラメータ設定の時間短縮を図ること
【解決手段】 原点サーチをする際の基本的な動作並びに原点の特定条件を規定する「原点サーチ動作」と、原点サーチ開始時の移動方向を規定する「原点サーチ開始方向」と、原点を特定する際の移動方向を規定する「原点入力検出方向」等を入力パラメータとし、各入力パラメータの設定値に対応するパルス列からなる複数の仮想入力信号(原点近傍信号,原点信号等)に基づき、その仮想入力信号のON/OFFの切り替えタイミングにあわせて設定値に合わせた動作を行い、開始地点Sから原点Gまでの移動軌跡を求め、その移動軌跡(横軸:位置,縦軸:移動速度のグラフ)を表示装置に表示する。
(もっと読む)
1 - 20 / 45
[ Back to top ]