
Fターム[3C269QE26]の内容
数値制御 (19,287) | 表示内容、監視、記録内容 (1,309) | 操作メニュー、ガイダンスを表示 (171) | 各種図形であるもの (14)
Fターム[3C269QE26]に分類される特許
1 - 14 / 14
ブロック実行順表示装置
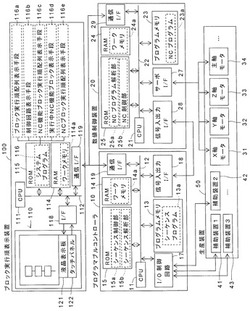
【課題】シーケンスプログラムおよびNCプログラムからなる制御プログラムの全体を構造的かつ視覚的に表現し、制御プログラムの実行順序および実行状態を容易に把握することができるブロック実行順表示装置を提供する。
【解決手段】数値制御およびシーケンス制御を備えた生産装置50と、シーケンスプログラム13aを実行するプログラマブルコントローラ10と、NCプログラム23aを実行する数値制御装置20と、シーケンス機能ブロックおよびNCプログラム実行ブロックを実行順に配列したブロック実行順配列を表示するブロック実行順配列表示手段116aと、配列要素の一つを選択する選択手段と、選択手段によってNCプログラム実行ブロックが選択されると、複数のNC機能ブロックを実行順に配列したNC機能ブロック実行順配列を表示するNC機能ブロック実行順配列表示手段116cを備える。
(もっと読む)
操作器の表示制御装置、及び操作器の表示制御方法

【課題】最低限の大きさの表示部しか備えられないであっても、作業者の操作性を向上させることのできる表示制御装置、及び表示制御方法を提供する。
【解決手段】ティーチングペンダント10は、画像を表示する液晶表示器14を備えている。制御部30は、ロボット70の各機能の実行に用いられる各ボタンを液晶表示器14に表示させる。制御部30は、ボタンのうち説明表示が要求されているボタンを主ボタンとして、主ボタンに関連する副ボタンを選択し、主ボタン及び副ボタンの説明を、液晶表示器14のうち主ボタン及び副ボタンが表示されていない部分に表示させる。
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
産業用ロボットの位置教示装置、産業用ロボットの動作教示装置およびプログラム
【課題】ロボットの周辺に関連機器を最適に配置するレイアウト設計と、各機器間のワークの受取り・引渡し関係を把握しつつ各機器の位置をロボットに教示する位置教示を同時に行うことができる位置教示装置を提供する。
【解決手段】レイアウト設計画面71において、設置領域図73にロボットイメージ77と、その周辺に関連するユニットのユニットイメージ52を表示する。各ユニットイメージ52を配置する都度、ワークの授受関係データに基づいて、設置領域図73上に配置された各ユニットイメージ52を結ぶと共にワーク搬送方向を指標する指標イメージ79を表示する。次に各ユニットイメージ52の設置領域図73上の位置に基づいて、各ユニットの位置情報をロボットに教示する。
(もっと読む)
測定プログラムのチェック方法及び測定機能を有する機械
【課題】動作内容を容易にチェックすることができ、信頼性の高い測定を行うことができる測定プログラムのチェック方法及び測定機能を有する機械を提供する。
【解決手段】測定プログラムの動作チェックをするチェックモードを選択して測定プログラムを起動し、表示手段60の画面上に文字で表示された測定プログラムの内容と画面上に図形、文字又は記号で表示された測定指令の内容とをチェックする。
(もっと読む)
設定支援装置及びコンピュータプログラム
【課題】複雑な動作を制御する場合であっても、ユーザが容易にパラメータ設定を行うことにより動作を制御することができる設定支援装置及びコンピュータプログラムを提供する。
【解決手段】外部機器の動作の種類ごとに設定するべき複数のパラメータを記憶する記憶手段10と、動作の種類の選択を受け付ける動作選択受付手段41と、受け付けた動作の種類に基づいて複数のパラメータを抽出する抽出手段42と、抽出されたパラメータの少なくとも一部のパラメータの入力領域を含む第一の画面を表示する第一表示手段43と、パラメータの選択を受け付けるパラメータ選択受付手段44と、一のパラメータの選択を受け付け、第一の画面のパラメータに基づいて、受け付けたパラメータのパラメータ値を入力する第二の画面を、該パラメータ及び関連するパラメータの入力領域を含めて表示する第二表示手段45とを備える。
(もっと読む)
加工シミュレーション装置
【課題】 効率よくシミュレーションを行うことができる加工シミュレーション装置を提供する。
【解決手段】 工具がワークを加工する際の工具軌跡または該工具軌跡に対応するワークの切削状態をシミュレーション表示するためのシミュレーションデータを軸制御データAに基づいて生成するデータ生成手段382と、シミュレーションデータに基づいて工具軌跡またはワークの切削状態をシミュレーション表示するシミュレーション手段38と、シミュレーションデータを記憶するデータ記憶手段386と、データ記憶手段386に記憶されたシミュレーションデータに基づいて工具軌跡またはワークの切削状態を再度シミュレーション表示する再シミュレーション手段39と、を備える。
(もっと読む)
ロボットの教示装置
【課題】効率的に短時間で教示を行い、教示作業の負担を軽減することが可能となるロボットの教示装置を提供する。
【解決手段】ツール姿勢をツール姿勢入力手段1025で入力し、ジョグ移動させる際にロボット先端の位置または基本軸のみの軸操作で、姿勢を同時に変更させるツール姿勢自動変更手段1026を設け、冗長自由度がある場合は障害物位置入力手段1027から入力された位置情報を基に、ジョグ移動させる際にロボットが障害物に干渉しないように冗長自由度の姿勢をも変更させる冗長姿勢自動変更手段1028を設ける。
(もっと読む)
動作プログラム作成支援システム
【課題】 複数のロボットやそれに付随する装置が連携しつつ並行して動作するシステムにおける動作プログラムの動作所要時間を知ることにより、各指令のタイミング調整を容易にし、動作プログラムを効率よく作成することができる動作プログラム作成支援システムを提供する。
【解決手段】 動作プログラム作成支援装置1と、ロボットや装置の動作を制御するコントローラ2、3、4と、がネットワーク5で接続され、動作プログラム作成支援装置1に、動作プログラムの指令毎にコントローラに動作所要時間を問合わせる動作所要時間問合せ部13を備え、コントローラ2、3、4に、動作に要する動作所要時間を算出し動作所要時間問合せ部13に出力する所要時間算出部201、301、401を備える。
(もっと読む)
産業用ロボットの手持操作器およびロボット制御システム
【課題】
作業者が手持操作器を両手で保持したまま、親指だけでその操作の多くを実行できる手持操作器を提供する。
【解決手段】
表示画面(4)の下部に操作入力手段(5)を備え、操作入力手段(5)の左右の側部に把持部(6)を備え、左右の把持部(6)をそれぞれ作業者の左手および右手で把持した時に、前記作業者の左手および右手の親指が届く範囲に十字カーソルキー(7)と選択キー(8)を備える。両手で手持操作器を保持したまま操作できるので、作業者の疲労が少なく、また手ブレも少ないので表示画面(4)を視認しやすい。
(もっと読む)
工程の流れに沿った情報設定画面の表示方法及びその機能を有するマルチウィンドウ方式のNC装置
【課題】 熟練していない現場のオペレータであっても画面上から次に何の操作を行えばよいかが容易に分かると共に、一画面上にて1モード当たりのほとんどの情報の入力設定が容易に行えるマルチウィンドウ方式のNC装置を得る。
【解決手段】 マルチウィンドウ方式のNC装置10は、工程流れアイコン表示指令部29とアイコン対応プログラム組合せ部32とアイコン対応プログラム画面指令部とを備えて、作業工程の流れに沿った情報設定画面を表示させるアイコン群を表示し、いずれかのアイコンが押されると、このアイコンに関連するプログラムの情報設定画面を画面に表示して入力を受け付ける。
(もっと読む)
自動機械システムおよびその制御方法
【課題】ネットワークを介して有線通信又は無線通信でコントローラと教示装置を接続する自動機械システムにおいて、複数台のロボットの中から特定のロボットのコントローラと接続する場合には、複数台ロボットの配置図を教示装置上に表示することで、作業者が直感的に特定のロボットを選択することが可能な自動機械システムを提供する。
【解決手段】
1つ以上の駆動機構を備える複数の自動機械1と、前記自動機械を駆動制御するコントローラ2と、前記自動機械を操作する教示装置3と、を備えた自動機械システムにおいて、前記教示装置は、前記コントローラとネットワークを介して通信を行う通信部と、前記複数の自動機械の配置図を表示する表示部8と、接続対象とする自動機械を選択するための選択手段15と、を備える。
(もっと読む)
工作機械のシステム制御
本開示は、工作機械システム(200)のモーションコントロールシステム(10、100)に関する。モーションコントロールシステム(10、100)の表面仕上げ品質パラメータの値は、工作機械システム(200)を用いて機械工作されるパーツ(500)の表面仕上げを制御するよう調整される。工作機械システム(200)は、会話動作モード、および、NC動作モードを含む。 (もっと読む)
ロボット言語処理装置
【課題】ロボット言語の表示・編集を行う際に教示装置やプログラミングペンダントに表示されるのは、従来、ロボット言語の中間コードをキャラクタ表現に変換したものだけであり、ロボットの動作を直感的に把握することができず、言語の習得に時間を要し、教示後にロボットを実際に動かして作成したプログラムの正当性を確認する必要があった。
【解決手段】グラフィカル表示が可能でありポインティングデバイスによってその表示画面中の位置を指定できる表示装置と、ロボットプログラムを格納するメモリと、ロボットプログラムを参照して、作業区間及びエアーカット区間を連続した線として表示装置に表示し、ポインティングデバイスにより表示画面に表示中のいずれかの線が指定されたときには、その線における作業内容の種類を表示画面に表示するグラフィカル言語処理部とを設け、グラフィカル・ユーザ・インタフェースに基づく教示を可能にする。
(もっと読む)
1 - 14 / 14
[ Back to top ]