
Fターム[3C269SA02]の内容
数値制御 (19,287) | 教示方法、教示手段 (478) | 制御対象を直接動かして教示するもの (162) | 人間の力のみで動かすもの (8)
Fターム[3C269SA02]に分類される特許
1 - 8 / 8
ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ
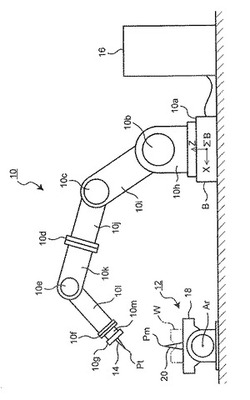
【課題】ポジショナ回転軸のロボットに対する相対的な位置姿勢を高精度に計測する。
【解決手段】
ロボット10に作業されるワークWを把持するポジショナ12の回転軸Arまたは直動軸の該ロボット10に対する相対的な位置姿勢を計測するロボット10の外部軸の計測方法であって、ポジショナ12の回転軸Arまたは直動軸に対する所定の位置に定義された計測点Pmにロボット10の基準点Ptが手動によって位置合わせされた状態の該ロボット10の姿勢を、基準点Ptが計測点Pmに位置合わせされた状態を維持しつつ計測姿勢に変更する。計測姿勢として、(1)関節10a〜10fそれぞれにおける、ポジショナ12が把持するワークWに対して作業を実行するときの作業姿勢時の関節値と計測姿勢時の関節値との間の差分値と、(2)関節10a〜10fそれぞれに対して予め定義されている重み値とに基づいて、作業姿勢に対する類似の程度が高い姿勢を決定する。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及びロボットアーム制御用集積電子回路

【課題】ロボットアームが動作する環境に適応し、さらに、作業者が簡単で短時間にロボットの教示を行うことが可能なロボット制御を実現できる、ロボットアームの制御装置及び方法、ロボット、ロボットアームの制御プログラム、及びロボットアーム制御用集積電子回路を提供する。
【解決手段】ロボットアーム(5)の制御装置(70)であって、ロボットアームの動作に関する情報が記憶された動作情報データベース(17)と、人(4)の力を検出する力検出部(53)と、人の力に応じて、動作情報データベースの動作情報を補正する動作補正部(20)を備えている。
(もっと読む)
ロボットアームの教示システム及び方法
【課題】冗長自由度を有するロボットアームに対する教示において、簡便な教示作業により、アーム全体の軌道を詳細に教示できるようにする。
【解決手段】本発明に係るロボットアームの教示システムは、アーム2の手首部11に搭載された第1の力センサ15と、前記アーム2の肩部13に搭載された第2の力センサ16と、教示者が前記アーム2の手先部A及び肘部Bを把持して前記アーム2を動かした時に得られる前記第1及び第2の力センサ15,16の検出信号に基づいて、前記アーム2の軌道を生成する演算装置3とを備える。
(もっと読む)
産業用ロボットのティーチングのための方法及びそれに対応して装備された産業用ロボット
【課題】キーボードまたはジョイスティックによるプログラミングによらず、簡単に短時間でティーチング可能な方法を提供する。
【解決手段】少なくとも一つの可動の関節式アーム14を有する産業用ロボットのための、運動プロセスをティーチングする方法であって、以下のステップに基づいて行う。1.関節式アーム14の先端手首に測定システム22の取り付け。2.関節式アーム14の自由端にエンドエフェクタ20であるハンドリング器具28の取り付け。3.オペレータによる前記ハンドリング器具28の手動操作。4.測定システム22によりハンドリング器具28の位置を検知。5.検知された位置を6次元で座標データへ変換。6.ロボットコントローラに座標データを記憶。
(もっと読む)
創薬用自動ティーチング装置及び方法
【課題】短時間で行え、計測精度が高精度であり、安全性が高い創薬用ピッキング機構の創薬用自動ティーチング装置及び方法を提供する。
【解決手段】創薬用ピッキング機構が、測定用治具400を把持するとともに、位置を認識させる収納セル112の4つの隔壁に囲まれた領域内に測定用治具400を挿入して4つの隔壁方向に移動させて、測定用治具400が隔壁110の上部に当接する位置を計測し、X軸方向の移動から得られた2つのX座標値とY軸方向の移動から得られた2つのY座標値を求め、前記2つのX座標値の平均と前記2つのY座標値の平均とを収納セル112の中心位置とする位置計測機能を有することによって、前記の課題を解決する。
(もっと読む)
ロボットの直接教示装置
【課題】御点位置を誘導操作中に容易に変更することを可能とし、教示作業の操作性を各段に向上させるとともに、教示作業に要する時間を短縮できる実用的な直接教示装置を提供する。
【解決手段】多関節ロボット1の先端部に力センサ3を介して設けられた操作ハンドル4と、操作ハンドル4に加わる教示作業者の操作力を力センサ3によって検出し、操作力に応じて力制御によりロボット1を移動させる指令を出力する力制御部61を備えた制御装置60からなるロボットの直接教示装置であって、操作ハンドル4は、教示中に教示作業者がロボット1の制御点の変更量および方向を入力する制御点入力手段5を備え、制御装置60は、制御点入力手段5にて入力された変更量および方向に応じてロボット1の制御点設定を更新し力制御部61へ出力する制御点演算部64を備える。
(もっと読む)
ロボットの直接教示装置
【課題】産業用ロボットによる組立作業のような複雑な動作の教示を行うための直接教示装置に関し、効率よく教示作業が行え、さらに直接教示時のロボットの動作の緩急を反映した作業プログラムを生成できる直接教示装置を提供する。
【解決手段】教示作業者が操作ハンドル4に加える力を力センサ3により検出し、力制御によりロボット1を動作させ、ロボット1の動作を記録することで教示を行うロボットの直接教示装置において、教示中のロボット1の位置と速度を予め設定されたサンプリング時間ごとに収録する収録部10と、収録部10に収録された速度データの変化に応じた間隔で収録部に収録された位置データを抽出してロボット1のパスデータを生成する抽出処理部11と、生成されたパスデータを記憶する記憶部12とを備え、操作ハンドル4は、生成されたパスデータを提示する表示部5を備える。
(もっと読む)
ロボットおよびその直接教示装置
【課題】
7軸以上の関節を備えたロボットの簡便かつ安全な教示装置を提供する。
【解決手段】
アーム先端部に設けられた力センサ3と、前記力センサ3に設けられた操作ハンドル4と、を備え、前記操作ハンドル4にかかるオペレータの操作力を前記力センサ3により検出し、前記操作力のかかる方向に前記アームを動作させることにより動作の教示を行う少なくとも7軸以上の関節で構成されたロボットにおいて、前記操作ハンドル4に、前記ロボットの冗長軸を操作するための冗長軸操作手段5を設ける。
(もっと読む)
1 - 8 / 8
[ Back to top ]