
Fターム[3D044AC16]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・入力信号 (1,301) | 車両の状態に関するもの (841) | 推進装置 (269) | アクセルペダル (111) | 踏込み量、踏込み速さ (35)
Fターム[3D044AC16]に分類される特許
1 - 20 / 35
車両用表示装置
【課題】車両乗員へ与える煩わしさを軽減することが可能な車両用表示装置を提供する。
【解決手段】車両用表示装置1は、自車両前方に交差点が複数存在する場合、それら交差点間の距離に応じて、表示処理を変更して側方映像の表示動作を異ならせる。このため、例えば交差点間の距離が近い場合には、自車両側方映像の表示についてオン/オフが連続しないように表示処理を変更することが可能となる。
(もっと読む)
ハイブリッド車両の制御装置

【課題】減速時に、燃費向上を図り、効率良く回生を行うことのできるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の運転状態に基づいて、エンジンのクランク軸におけるクランク端目標トルクを算出し、クランク端目標トルクが予め定められる所定値よりも小さい場合にハイブリッド車両の減速状態と判断し、その直後からロックアップクラッチを締結し、減速状態が判断された場合に、クランク端目標トルクに基づき、エンジンのエンジン目標トルク及びモータジェネレータのモータ目標トルクを算出し、減速トルク算出手段により算出された前記モータ目標トルクに基づいて、モータジェネレータによる回生が行われるよう制御する。
(もっと読む)
表示制御装置
【課題】乗員にとって有効で、視認性や操作性が良好な情報を表示することができる表示制御装置を提供すること。
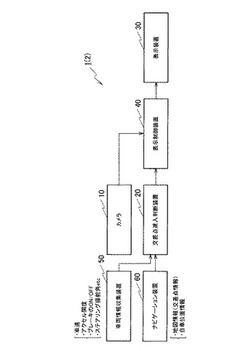
【解決手段】車両の乗員の着座位置を検出し(ステップS10)、この検出した乗員の着座位置を基準として車載アプリケーション毎の画像情報の属性を含む画像属性情報に基づいてディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報を決定し(ステップS20)し、この決定したディスプレイ6a、6b、・・・、6n毎に表示すべき画像情報をディスプレイ6a、6b、・・・、6nに表示する(ステップS30)。
(もっと読む)
車両用表示装置
【課題】燃費を向上させるための車両の運転操作をより適切に支援することができる車両用表示装置を提供する。
【解決手段】アクセル開度センサ16は、操作者によるアクセルペダル12の操作量(アクセル操作量)Aを検出する。操作量変化率算出部18は、アクセル開度センサ16により検出されたアクセル操作量Aに基づいて、アクセル操作量Aの時間変化率(瞬間時間変化率)dA/dtを所定時間Δt1おきに算出する。表示装置24は、操作量変化率算出部18で算出されたアクセル操作量Aの時間変化率dA/dtを示す情報を表示する。
(もっと読む)
車両の自動走行制御装置
【課題】エンジン制御用のECUに対してACC(Adaptive Cruise Control:車間距離制御)等の外部モジュールを容易に増設できるようにする。
【解決手段】要求車両加速度演算手段41(ECU)は、設定車速選択部45、F/B加速度演算部46、要求車両加速度演算部47の機能を備えている。設定車速選択部45は、定速走行制御システムの車速設定スイッチでセットした第1の設定車速と、要求車両加速度演算手段41に接続されたACCモジュールから送信されてくる第2の設定車速とを比較して小さい方を選択する。F/B加速度演算部46は、車速センサ31で検出した実車速と設定車速選択部45で選択した設定車速との偏差を小さくするように車両加速度をフィードバック補正するためのF/B補正量を演算する。要求車両加速度演算部47はF/B加速度演算部46で演算したF/B補正量を用いて要求車両加速度を演算する。
(もっと読む)
走行制御装置
【課題】 運転者の加速要求を自動発進制御による加速に反映させる。
【解決手段】 先行車との車間距離を検出して先行車との車間距離が目標車間距離となるように先行車追従制御を行うとともに、停車状態から先行車が発進したときに先行車に追従して発進させる自動発進制御を行う走行制御装置において、先行車が発進したときに自動発進制御を開始させるための自動発進操作部材の操作の仕方を検出し、操作の仕方に基づいて自動発進制御の加速の仕方を変更する。
(もっと読む)
車両の制御装置
【課題】 ブレーキ振動あるいは異音の発生を防止もしくは抑制するための制御が行われる際に、車両の走行状態が変化して乗員に違和感を与えてしまうことを回避できる車両の制御装置を提供する。
【解決手段】 乗員の操作と独立して制動装置を制御して各車輪の制動トルクを設定する制動トルク設定手段と、制動装置の振動を検出する振動検出手段(ステップS101)とを備え、制動装置の振動が検出された場合に振動を抑制する車両の制御装置において、乗員の操作と独立して動力源の出力を制御して各車輪の駆動トルクを設定する駆動トルク設定手段と、車両の走行状態を検出する走行状態検出手段(ステップS102)と、制動装置の振動が検出された場合に、走行状態に基づいて制動トルクと駆動トルクとの少なくともいずれか一方を変更する振動抑制手段(ステップS104,S105)とを備えている。
(もっと読む)
先行車追従走行制御装置
【課題】 先行車追従走行制御における停止保持制御状態から制御解除状態への切り換え操作を改善する。
【解決手段】 車両の走行駆動源による駆動力と通常ブレーキ装置による制動力とを制御して、先行車との車間距離を保ちながら追従走行制御を行う追従走行制御装置において、追従走行制御中に停車状態が検出され、駐車ブレーキ装置を制御して作動させている状態(停止保持制御状態)において、追従走行制御を解除するための解除操作部材に対して追従走行制御を解除する操作と異なる所定の操作が行われた場合には、追従走行制御を解除して駐車ブレーキ装置を非作動とした状態(制御解除状態)へ切り換える。
(もっと読む)
車両用入力装置
【課題】 運転者の意図する操作内容とは異なる操作が行われても、運転者に違和感を与えることがない車両用入力装置を提供する。
【解決手段】 ステアリングホイール101の操舵の有無を舵角センサ19で検出し、舵角センサ19で検出されたステアリングホイール101の操舵角Sが所定の角度範囲の場合に、先行車追従制御システムに関する操作スイッチであるコントロールスイッチ16の操作を無効とするように構成した。これにより、ステアリングホイール101の回動位相に起因するコントロールスイッチ16の誤操作があっても、先行車追従制御システムの動作には影響がないので、運転者の意図しない内容の先行車追従制御により運転者が違和感を覚えることがない。
(もっと読む)
車両用速度制御装置
【課題】 車両の操作性を向上させること。
【解決手段】 車速を所定速度以下に制限する車速制限手段と、アクセル開度を検出するアクセル開度検出手段と、を備える車両用速度制御装置は、アクセル開度検出手段により検出されたアクセル開度の変化割合を算出する変化割合算出手段と、変化割合算出手段により算出された変化割合が所定割合以上であるか否かを判定する判定手段と、判定手段により変化割合が所定割合以上であると判定されたとき、車速制限手段による車速の制限を解除する制限解除手段と、を備えている。
(もっと読む)
追突防止ブレーキシステム
【課題】
自動車の動力を正誤し従来の自動車よりも停止距離を短くして夏の暑い時、エアコンを入れるとエンジン回転が下がり悪くブレーキの利きが悪くなるのを防ぐ装置。
【解決手段】
この装置はブレーキペダルを踏まずモーターやエンジンブレーキを使用する為に安全に操行できます。第3図 急ブレーキをかけると1.のスピードセンサーが0になると解除されエアコンとエンジンは作動を始める。(ブレーキを利かさない時も解除される)
6.のブレーキシリンダー内の圧力により0.05気圧でエアコンが切れ0.5気圧でエンジンを停止する。(車種により異なる)
(もっと読む)
車両制御装置及び車両制御方法
【課題】 車両を通常制御又はクルーズ制御に切り替えて制御可能な車両制御装置において、クルーズ制御時における制御の応答性を簡易な手法により向上させる。
【解決手段】 本発明の車両制御装置においては、クルーズ制御時において、第2目標駆動力算出部4において算出されたクルーズ制御に必要な第2目標駆動力そのものが、制御量算出部2に入力され、その第2目標駆動力に基づいて制御量が算出される。すなわち、仮想的なアクセル開度から演算した駆動力を用いて制御量を算出するのではなく、クルーズ制御に必要な駆動力を物理量として演算し、これを直接用いて制御量を算出する。このため、車両を目標とする制御状態に正確かつ迅速に近づけることができる。また、要求される駆動力そのものを直接狙い撃ちする制御であるため、車両の種類によらず適用することが可能になる。
(もっと読む)
内燃機関の制御装置
【課題】電子スロットルシステムに異常が生じた場合であっても、当該機関の出力の意図せぬ増大を好適に抑制することのできる内燃機関の制御装置を提供する。
【解決手段】スロットルバルブ4の実開度THは、スロットルセンサ30によって検出され電子制御装置20に取り込まれる。電子制御装置20は、実開度THを目標開度TAにフィードバック制御する。実開度THが急減するときには、点火プラグ12の遅角操作又は燃料噴射弁8による燃料カット操作を強制的に行う。
(もっと読む)
車両用走行制御装置
【課題】 通常走行モードと自動走行モードの切替操作の操作性が向上した車両用走行制御装置を提供すること。
【解決手段】 車両において、運転者のアクセルペダル操作に応じた通常走行モードと運転者のアクセルペダル操作によらない自動走行モードのいずれかで車両の走行を制御する車両用走行制御装置が、アクセルペダルのストローク角を検出するペダルストローク角検出手段と、通常走行モードと自動走行モードとを切り替える走行モード切替手段とを備え、走行モード切替手段が、自動走行モードから通常走行モードへ移行してから所定時間内にペダルストローク角検出手段によりアクセルペダル不感帯内でのアクセルペダル操作が1回又は所定の複数回検出されたとき、走行モードを自動走行モードへ戻す。
(もっと読む)
車両用走行制御装置
【課題】 クルーズ走行時の運転者の運転(操作)負荷を軽減する車両用走行制御装置を提供すること。
【解決手段】 定速走行制御機能を備えた車両においてアクセルペダル反力の大きさを制御する車両用走行制御装置が、運転者によるアクセルペダル操作の状態を検出するアクセルペダル操作検出手段と、アクセルペダル反力の大きさを制御するアクセルペダル反力制御手段と、定速走行制御中、自車両の車速が設定車速に維持されるようにスロットル開度を制御するスロットル開度制御手段とを備え、アクセルペダル反力制御手段が、定速走行制御中、アクセルペダル開度に対してアクセルペダル反力が急増する第一の領域を設け、スロットル開度制御手段が、アクセルペダル操作検出手段により検出された上記第一の領域における又は該第一の領域よりもアクセルペダル開度が小さい第二の領域におけるアクセルペダル操作の状態に応じて上記設定車速を変更する。
(もっと読む)
車両用走行制御装置
【課題】 定速走行制御機能を備えた車両において運転者のアクセルペダル操作に関する違和感を解消する車両用走行制御装置を提供すること。
【解決手段】 定速走行制御機能を備えた車両においてアクセルペダル反力を制御する車両用走行制御装置に、スロットルバルブ開度を検出するスロットルバルブ開度検出手段と、定速走行制御中に、アクセルペダルのペダルストローク角が所定のペダルストローク角に達したときに、アクセルペダル反力を急増させるフットレスト化手段と、定速走行制御中に上記所定のペダルストローク角を制御するフットレスト化位置制御手段とを備える。フットレスト化位置制御手段は、定速走行制御中の上記所定のペダルストローク角とスロットルバルブ開度との対応関係が通常走行時のペダルストローク角とスロットルバルブ開度との対応関係と所定の関係を有する(例えば一致する)ように、上記所定のペダルストローク角を制御する。
(もっと読む)
車両用走行制御装置
【課題】 通常走行モードと自動走行モードの切替操作の操作性が向上した車両用走行制御装置を提供すること。
【解決手段】 車両において、運転者のアクセルペダル操作に応じた通常走行モードと運転者のアクセルペダル操作によらない自動走行モードのいずれかで車両の走行を制御する車両用走行制御装置が、アクセルペダル開度を検出するアクセルペダル開度検出手段と、アクセルペダル反力の大きさを制御するアクセルペダル反力制御手段と、通常走行モードと自動走行モードとを切り替える走行モード切替手段とを備え、アクセルペダル反力制御手段がアクセルペダル開度検出手段により検出されたアクセルペダル開度が所定の閾値以下のときにアクセルペダル開度に対するアクセルペダル反力特性に所定の変化(例えばクリック感)を加え、走行モード切替手段が該所定の変化に対する運転者のアクセルペダル操作に応じて走行モードの切替を行う。
(もっと読む)
車両の走行安全装置
【課題】 進行方向および通過中のカーブに対して適切に安全装置を作動させる。
【解決手段】 作動部64は、安全装置の作動時に運転意志検出部65にて運転者の加速意志が検出されないときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態で運転意志検出部65により加速意志が検出されたときには所定期間を延長することを終了する。作動部64は、安全装置の作動時にヨーレートまたは横加速度の少なくとも何れかが増加傾向に変化することが検出されたときには安全装置を作動させる所定期間を延長し、さらに、所定期間を延長している状態でヨーレートまたは横加速度が増加傾向に変化しないことが検出されたときには所定期間を延長することを終了する。
(もっと読む)
車両の制御装置
【課題】 操作性を悪化させることなく、乗員が望む停止位置で車両を停止させる。
【解決手段】 ECT_ECUは、アクセル開度Pを検出するステップ(S124)と、アクセル開度Pの変化量ΔPを検出するステップ(S126)と、アクセル開度Pの変化量ΔPに基づいて目標移動距離LIを算出するステップ(S128)と、算出された目標移動距離LIの総和である総移動距離LAを算出するステップ(S130)と、車両の実走距離が総移動距離LAとなるように車両を制御するステップ(S132)と、アクセル開度変化率DPが0であるという条件、アクセル開度変化率DPがDP(0)(DP(0)≒0)より小さいという条件およびブレーキペダルが踏まれたという条件の少なくともいずれかが満たされた場合(S136にてYES)、車両の移動を停止するステップ(S138)とを含む、プログラムを実行する。
(もっと読む)
定速走行制御装置を具備する車両の走行安全装置
【課題】 定速走行制御の実行時に車両の進行方向前方に存在する連続カーブを通過する際に、適切に定速走行制御装置を作動させる。
【解決手段】 定速走行制御部65は操作者により定速走行制御の作動が指示されると、予め設定された適宜の目標速度VOを維持するようにして車両を自動的に加速または減速させて速度制御を行う。定速走行制御部65は、定速走行制御の実行時に連続する複数のカーブからなる連続カーブを通過する際に、適宜の前方側のカーブを通過後に運転意志検出部67にて運転者の加速意志が検出された場合には、通過した前方側のカーブから先のカーブまでの距離に基づき設定した所定速度まで車両を加速させる。
(もっと読む)
1 - 20 / 35
[ Back to top ]