
Fターム[3D044AE06]の内容
定速走行制御及び計器板 (7,800) | 定速走行制御・制御部の特徴 (590) | 信号の処理、手段 (524) | 遅延 (9)
Fターム[3D044AE06]に分類される特許
1 - 9 / 9
車両のクルーズコントロール装置
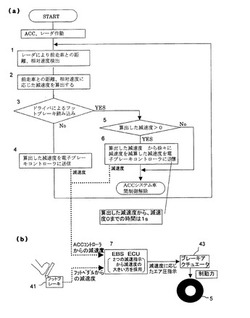
【課題】ドライバの操作に基づいてクルーズコントロールの解除が的確に行われる車両のクルーズコントロール装置を提供する。
【解決手段】前走車との車間距離を維持するクルーズコントロールを行う車両のクルーズコントロール装置において、クルーズコントロール時に検出される前走車との車間距離に応じて制御減速度を算出する制御減速度算出手段(ステップ2)と、検出されるフットブレーキペダルの踏み込み量に応じて操作減速度を算出する操作減速度算出手段と、制御減速度と操作減速度のうち常に大きい減速度を選択して車両の制動を行う車両制動手段(ステップ7)と、フットブレーキ踏み込みを検出したら、所定の短時間、制御減速度をフットブレーキ踏み込みからの経過時間に応じて減少させてからクルーズコントロールを解除するクルーズコントロール解除手段(ステップ5、6)とを備えた。
(もっと読む)
ベルト式無段変速機の油圧制御装置

【課題】 ベルト式無段変速機の変速油圧がかえって過大になり、フリクションロスの増加および燃費の悪化を招来することを回避する。
【解決手段】 ステップS1においてクルーズコントロール制御がONになっている場合(Yes)、ステップS2へ進み、目標変速油圧tPvに含まれる余裕油圧を低減する。
(もっと読む)
車間距離情報の処理装置および車間距離制御装置
【課題】 車間距離が急激に変化した場合でも車間距離を速やかに認識できるようにして応答性を向上させることができるようにした、車間距離情報の処理装置および車間距離制御装置を提供する。
【解決手段】 自車両と先行車両との車間距離情報を検出する車間距離検出手段100と、車間距離情報をフィルタ処理するフィルタ手段106とを備え、車間距離情報を処理して出力する車間距離情報の処理装置において、車間距離検出手段100が検出した車間距離情報の変化率又はフィルタ手段106によってフィルタ処理されたフィルタ後車間距離情報の変化率が所定値以上の時は検出した車間距離情報を出力し、車間距離検出手段100が検出した車間距離情報の変化率又はフィルタ手段106によってフィルタ処理されたフィルタ後車間距離情報の変化率が所定値未満のときはフィルタ後車間距離情報を出力する切替手段207を備えて構成する。
(もっと読む)
車両の制御装置
【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
相対速度算出装置および車間距離制御装置
【課題】 相対速度算出値に含まれるノイズを抑制と、相対速度算出値をフィルタ処理する際に生じる応答遅れの低減とを両立させることができるようにした、相対速度算出装置および車間距離制御装置を提供する。
【解決手段】 自車両と該自車両の前方または後方を走行する他車両との車間距離情報を検出する車間距離検出手段100と、車間距離情報に基づいて予め設定された演算周期(例えば20ミリ秒)毎に自車両と他車両との相対速度情報を算出する相対速度算出手段108とを備えた車間距離制御装置において、相対速度算出手段108は、演算周期nにおいて入力された車間距離情報と所定周期数r(例えば、r=15)だけ前の演算周期(n−r)において入力された車間距離情報とに基づいて、相対速度情報を算出する。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、IPU5による先行車の捕捉とロストが頻繁に繰り返されている場合には、ロストカウンタCt1の作用によって判定用カウンタCt2にカウンタ値を加算し、先行車が継続的に捕捉されている場合、あるいは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt2からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt2を適切に増減させることができ、この判定用カウンタCt2が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
車両の走行制御装置
【課題】 先行車両に追従する走行制御の実行状態を運転者に適切に認識させる。
【解決手段】 先行車両の検出が不可である場合、または、所定時間後にブレーキの異常状態(例えば、ブレーキパッドの過熱状態等)が発生することを示す過熱警告フラグのフラグ値が「1」である場合に、所定時間の初期値が設定された減算タイマーの作動を開始し、減算タイマーのタイマー値と共に、タイマー値の経過後に追従制御の実行が停止されることを、減算タイマーの減算が終了するまでの期間に亘って運転者に報知する。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、車外環境の悪化等によってIPU5による立体物の継続的な認識時間が短くなり先行車の捕捉とロストが頻繁に繰り返されている場合には、判定用カウンタCt1にカウンタ値を加算し、先行車が継続的に捕捉されている場合、或いは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt1からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt1を適切に増減させることができ、この判定用カウンタCt1の計数値が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
運転操作補助システムを継続して使用するときでも確実に情報の伝達を行える車両用運転操作補助装置を提供する。
【解決手段】
自車両と先行車との接触の可能性が高い場合は、接触可能性を低下するように制駆動力制御とアクセルペダル反力制御を行う。システムによる制駆動力制御が継続的に行われている場合、運転者は継続的に減速感を感じるので、接触可能性の報知としての減速度の変化を感知できなくなってしまう。制動制御を開始する前には、ブレーキアクチュエータをスタンバイ状態にしてブレーキの応答性を高めているが、制駆動力制御が継続的に行われている場合はスタンバイ状態を解除する。これにより、実際に制動力が発生するタイミングを遅くして運転者に刺激を与える。
(もっと読む)
1 - 9 / 9
[ Back to top ]