
Fターム[3D052BB11]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 車両状態(条件,作用) (599) | 旋回 (424) | その場旋回,スピンターン,超信地旋回 (85)
Fターム[3D052BB11]に分類される特許
1 - 20 / 85
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
稲麦用コンバインのスピン旋回走行変速装置

【課題】従来のコンバイン、または両側のクローラにて一方が高速、一方が定則の大径旋回でコンバインの空転行程または動力消耗が増加する、または両側のクローラにて一方が走行、一方が停止する小径旋回での、土壌を損なう問題を効果的に解決する稲麦用コンバインのスピン旋回走行変速装置を提供する。
【解決手段】稲麦用コンバインのスピン旋回走行変速装置であって、変速装置本体内の変速機構と、旋回機構と、減速機構とを備えており、旋回機構は減速機構を介してコンバインの走行を実現し、旋回機構は旋回シャフトを備えており、旋回シャフトにはセンタドライブギヤが設けられており、センタドライブギヤの左右両側には対称となる噛み合いギヤ、フォーク、ディスク、引張バネ、反転クラッチおよび反転クラッチギヤがそれぞれ設けられており、噛み合いギヤはフォークでの駆動にてセンタドライブギヤに可動的に連結されており、フォークはディスクを押動して反転クラッチを結合することで動力伝達を実現するものであり、引張バネの一端はディスクに当接しており、引張バネの他端は反転クラッチに当接しており、反転クラッチギヤは反転クラッチとの結合によって、噛み合いギヤに対する駆動を実現している。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】簡単な構成のブレーキ圧発生回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動することで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、旋回内側に対応する左小旋回制御弁63または右小旋回制御弁64の一方を弁開状態に制御する。これらの制御弁63または64の一方を経て、小旋回用ポンプ57から吐出して小旋回圧供給通路60に供給するブレーキ圧油を、電磁比例リリーフ弁62によって無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御し、旋回内輪側に対応する左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを用いた安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、電磁比例リリーフ弁62のリリーフ圧を無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御することで、プライオリティバルブ59をシフトさせて、ポンプ57からバケット作業機回路60aへの流量より小旋回圧供給回路60への流量を優先させるとともに、電磁比例リリーフ弁62に基づいて小旋回圧供給回路60の圧力を制御し、左旋回の場合は左小旋回制御弁63のみを弁開状態に制御する。
(もっと読む)
作業車両
【課題】ミッションケース88に設けられた直進出力検出手段93と旋回出力検出手段95とを泥土等から保護するガード板353に関して、ミッションケース88に取り付け易い構造で且つ部品点数も少なくする。
【解決手段】ミッションケース88における左右一側面の上部側に、直進用及び旋回用油圧式無段変速機構53,54を内蔵する油圧変速ケース350を取り付ける。前記ミッションケース88のうち前記油圧変速ケース350と反対側の側面から横方向外向きに突出したPTO軸99の突端側に、PTOプーリ119を配置する。前記ミッションケース88のうち前記PTO軸99より下方に、前記直進用油圧式無段変速機構53の変速出力量を検出する直進出力検出手段93と、前記旋回用油圧式無段変速機構54の変速出力量を検出する旋回出力検出手段95とを、前後に並べて配置する。正面視で前記ミッションケース88と前記PTOプーリ119との間に位置するガード板353によって、前記両出力検出手段93,95の外周側を覆う。
(もっと読む)
走行伝動装置の制御装置
【課題】旋回中に左右の走行装置の速度差を変更した際の違和感を低減するための走行伝動装置の制御装置を提供する。
【解決手段】制御部は、人為的に操作される操向操作部材が第1操作位置から第2操作位置に切換操作される際に、切換操作の操作量に応じてクラッチによる動力の伝達量を漸増させてクラッチを入り状態とする。また、制御部は、操向操作部材が第2操作位置から第3操作位置に操作される際には、操作量の増加に伴いクラッチによる動力の伝達量を漸減させクラッチを切り状態とするとともに、制動手段による制動力を漸増させる。ただし、制御部は、操向操作部材の切換操作の操作速度が所定速度以上であった場合には、クラッチが伝動状態となるまで動力の伝達量を漸増させた後、動力の伝達量を漸減させるとともに制動手段による制動力を漸増させる。
(もっと読む)
車両
【課題】簡易な操作により、超信地旋回を行うことが可能な車両を提供する。
【解決手段】2つの前輪(左前輪21及び右前輪31)と、前記前輪にそれぞれ連結され、前記前輪を操舵する操舵用アクチュエータ(左前輪操舵モータ23及び右前輪操舵モータ33)と、前記操舵用アクチュエータの動作を指示するステアリングホイール62と、ステアリングホイール62の回動角θに基づいて定められる旋回中心Z周りを旋回することが可能な前記前輪の操舵角(δFL及びδFR)をそれぞれ算出し、前記前輪の操舵角が算出された操舵角となるように前記操舵用アクチュエータを動作させるコントローラ100と、を具備した。
(もっと読む)
操作圧制御装置
【課題】指標値指令手段にて指標値が指令されて被操作装置に対して操作圧がかかっている状態において、操作関係選択手段にて選択される操作関係が異なる操作関係に変更された場合であっても、被操作対象の操作圧がオーバーシュートしたりアンダーシュートすることを回避して円滑に操作することが可能となる操作圧制御装置を提供する。
【解決手段】操作圧の大きさに対応する指標値、及び、複数の操作関係のうちのいずれかを選択される操作関係に基づいて目標操作圧を求める目標操作圧演算処理、及び、実操作圧が目標操作圧になるように操作圧調整手段を作動させる操作圧調整処理を実行する制御手段64が、操作圧調整処理において、操作関係が異なる操作関係に変更されたときには、操作関係変更前の目標操作圧から操作関係変更後の目標操作圧となる状態に漸次目標操作圧を変更する形態で操作圧調整手段71を作動させる。
(もっと読む)
作業車両の操舵制御装置
【課題】作業車両の左右操舵装置において、走行面に適した速度で操舵できるものとし、旋回精度を高める。
【解決手段】操舵操作装置(11)の操作位置を検出する操作位置検出手段(SE1)と、機体の角速度を検出する角速度検出手段(SE2)と、左右のサイドクラッチ駆動手段(22,23)と、サイドクラッチ比例減圧弁(24)とを備え、操作位置検出手段(SE1)の検出情報に基づいて左右のサイドクラッチ駆動手段(22,23)を作動して左右方向に操舵し、該操舵状態における角速度検出手段(SE2)からの検出情報が所定の上限角速度または下限角速度を超えた場合に、この所定の上限角速度乃至下限角速度の範囲内の角速度を維持すべくサイドクラッチ用比例減圧弁(24)を自動的に減圧あるいは増圧調整する。
(もっと読む)
高所作業車
【課題】安全な走行を維持しつつ、作業者の乗り心地または操作フィーリングを良好に保つ高所作業車を提供する。
【解決手段】左右の駆動手段を駆動させるための走行モータと、中立位置からの操作量と操作方向に応じて走行モータの回転速度と回転方向を設定可能な操作レバーと、走行モータの回転速度を高速から低速まで選択可能な速度レンジ選択スイッチと、操作レバーの操作量および操作方向また速度レンジ選択スイッチにより選択された速度レンジに基づいて走行モータの回転方向と回転速度を制御するコントローラを備えた高所作業車において、走行制御装置が、非操作状態からターンを行う場合には走行モータの回転速度を強制的に低速に設定し、車体が直進している状態からターンを行う場合には走行モータの回転速度を変速レンジ選択スイッチにおける選択に基づいて設定する。
(もっと読む)
作業車輌の前輪操向装置
【課題】配置するスイッチを少ない個数とするものでありながら、操舵方向及び複数段階の操舵角を検出することが可能な作業車輌の前輪操向装置を提供する。
【解決手段】前輪操向装置20は、大径部45a,45c,45f及び小径部45b,45d,45e,45gを有する軸状カム部材45と、該軸状カム部材45が貫通配置された位置検出シリンダ43と、該位置検出シリンダ43に固定された左検出スイッチ41及び右検出スイッチ42とからなる操舵位置検出装置40を備えて構成されている。軸状カム部材45は、操向操作に基づいて移動し、中立状態から最大操舵角となるまでの間に、操舵角に応じた複数回の状態変化を出力させることができ、操舵方向及び複数段階の操舵角を検出することができる。
(もっと読む)
コンバイン
【課題】旋回状態表示用としての特別のモニタ表示器を不要とし、構成の簡素化によって製造コストを低減する。
【解決手段】車台(7)の前部側にハンドル(1)の操作によって油圧式無段変速装置(2)を駆動させて旋回を行わせる差動装置(3)を内装した走行用ミッションケース(4)を設け、グレンタンク(10)に貯留された穀粒量およびエンジン(20)の回転数を基本画面(A)としてモニタ表示器(6)に表示している状態で、ハンドル(1)による旋回操作を旋回切替センサ(61)で検出した場合に、左右のクローラ(5a,5b)の速度差をオペレータに認識させる表示画面(B)をモニタ表示器(6)に表示させるコントローラ(83)を設ける。
(もっと読む)
コンバイン
【課題】旋回状態表示用としての特別のモニタ表示器が不要となり、構成の簡素化によって製造コストを低減する。
【解決手段】車台(7)の前部側にハンドル(1)の操作によって油圧式無段変速装置(2)を駆動させて旋回を行わせる差動装置(3)を内装した走行用ミッションケース(4)を設け、グレンタンク(10)に貯留された穀粒量およびエンジン(20)の回転数を基本画面(A)としてモニタ表示器(6)に表示し、左のクローラ(5a)と右のクローラ(5b)との速度差が設定速度を超えるまでハンドル(1)を操作した場合に当該速度差をオペレータに認識させる表示画面(B)をモニタ表示器(6)に表示し、左のクローラ(5a)と右のクローラ(5b)との速度差が設定速度以内に復帰するまでハンドル(1)を操作した場合には、モニタ表示器(6)から前記表示画面(B)の表示を消去して基本画面(A)の表示に戻すコントローラ(83)を設ける。
(もっと読む)
作業車
【課題】 車体に大幅な構造改良を加えることなく簡素な構成で自動操向運転を行えるようにすることが可能であり、且つ、極力迅速に旋回操作を行なえるようにしながらもショックの少ない安定した旋回走行を行うことが可能な作業車を提供する。
【解決手段】 旋回操作レバー18が中立位置から一方向に移動すると右旋回状態に切り換わり且つ移動量が大きくなるほど大きい旋回力となり、中立位置から他方向に移動すると左旋回状態に切り換わり且つ移動量が大きくなるほど大きい旋回力となる操向手段が備えられ、旋回操作レバー18を所定移動経路に沿って移動操作自在な旋回用レバー駆動装置26が備えられ、制御手段が、旋回操作レバー18の操作位置が大側操作域にあるときには小側操作域にあるときよりも旋回操作レバー18を低速で移動させる形態で旋回用レバー駆動装置26の作動を制御する。
(もっと読む)
刈取収穫機の走行変速構造
【課題】 刈取収穫機の走行変速構造において、変速段数を抑えながら、移動速度を十分に高速側に設定することができ、低速刈取作業速度を十分に低速側に設定することができるように構成する。
【解決手段】 走行装置への伝動系に、複数段に変速自在な走行用の第1変速装置19及び第2変速装置28とを直列に備える。第1変速装置19が低速位置で第2変速装置28が高速位置での伝動比と、第1変速装置19が高速位置で第2変速装置28が低速位置での伝動比とを、同じ伝動比に設定する。第1変速装置19が低速位置で第2変速装置28が高速位置であると刈取作業速度が得られ、第1変速装置19が低速位置で第2変速装置28が低速位置であると低速刈取作業速度が得られる。第1変速装置19が高速位置で第2変速装置28が高速位置であると移動速度が得られ、第1変速装置19が高速位置で第2変速装置28が低速位置であると刈取作業速度が得られる。
(もっと読む)
作業車の走行伝動構造
【課題】 作業車の走行伝動構造において、シフト部材及び油圧クラッチの組み合わせにより緩旋回状態、信地旋回状態及び超信地旋回状態が得られるように構成した場合、機体を一時停止させなくても、緩旋回状態から超信地旋回状態への移行、及び超信地旋回状態から緩旋回状態への移行が行えるように構成する。
【解決手段】 緩旋回位置及び逆転位置に操作自在なシフト部材44を備え、シフト部材44の伝動下手側に、シフト部材44の動力を伝動及び遮断自在な摩擦多板型式の油圧クラッチ51、制動機構52、旋回方向選択機構54を備える。シフト部材44を緩旋回位置又は逆転位置に操作して、油圧クラッチ51を伝動状態に操作し、制動機構52を解除状態に操作可能、並びに、油圧クラッチ51を遮断状態に操作し、制動機構52を制動状態に操作可能な操作手段を備える。
(もっと読む)
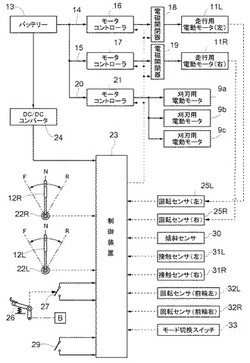
作業車輌
【課題】エンジンからの出力を利用して駆動される走行部を備えた作業車輌であって、車速域によらず旋回側の走行部を停止させるブレーキターンを有効に行うことができる作業車輌を提供する。
【解決手段】制御装置270は、HST102が旋回用電動モータ33L,33Rの最大出力によっても対応する走行部40L,40Rを停止状態とさせることができない高速出力状態の場合に旋回操作部材56L,56Rが操作されると、通常制御モードに代えて、旋回操作部材56L,56Rが非操作位置から最大操作位置へ操作された際にHST102の出力回転数が旋回用電動モータ33L,33Rの最大出力によって対応する走行部40L,40Rの回転数を0以下とさせ得る基準回転数Smとなるような減速制御を行うとともに旋回操作部材56L,56Rの操作量に応じて旋回用電動モータ33L,33Rの出力制御を行うブレーキターン制御を行う。
(もっと読む)
作業車両
【課題】クローラ式走行装置を駆動する静油圧式無段変速装置と、走行変速レバー及びステアリングハンドルと、これら走行変速レバー及びステアリングハンドルと静油圧式無段変速装置とを連結する機械的連係機構とを備えた作業車両において、前記機械的連係機構構を一旦分解して再び組み付ける場合、当該機械的連係機構を構成する揺動リンクのニュートラル調整を容易に行えるようにする。
【解決手段】機械的連係機構L1,L2を構成する揺動リンク19,22,36を、予め設定されたクローラ式走行装置2L,2Rの走行停止状態を現出する中立位置に固定自在となす簡単な構成のニュートラル調整手段Aを設けた。
(もっと読む)
コンバイン
【課題】操向レバーを操作しながら機体の旋回状態を容易に切り換えることができ、旋回状態切換操作具の操作性を向上できるコンバインを実現する。
【解決手段】コンバインにおいて、操向レバー70の近傍で操向レバー70の右側に旋回状態切換操作具77を備え、旋回状態切換操作具77により、機体の旋回状態を、旋回半径が異なる複数の旋回状態に切換可能に構成する。
(もっと読む)
作業車の操向操作構造
【課題】 作業車の操向操作構造において、右及び左の走行装置に速度差を与える第1及び第2旋回機構を備えた場合、作業車の旋回性能及び旋回操作の操作性の向上を図る。
【解決手段】 操向操作具77の単位操作量に対する第1旋回機構(第2旋回機構)による単位速度差が、操向操作具77の直進位置N側の領域で小さく、操向操作具77の操向限度側の領域で大きくなるように構成する。第1状態の単位速度差の変化特性と、第2状態の単位速度差の変化特性とを異なるものに設定する。
(もっと読む)
1 - 20 / 85
[ Back to top ]