
Fターム[3D232DA10]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角速度 (667) | タイヤ舵角速度 (42)
Fターム[3D232DA10]に分類される特許
1 - 20 / 42
車両の操舵支援装置及び操舵支援方法
【課題】操舵支援トルクの急激な変化や断続的な変化を抑制することが可能な、車両の操舵支援装置及び操舵支援方法を提供する。
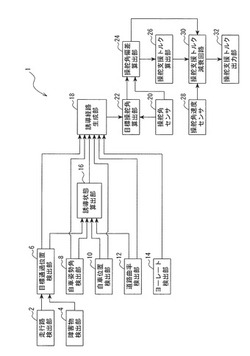
【解決手段】走行路における目標通過位置へ到達するまでに自車両が目標とする姿勢角及び横位置を算出する誘導状態算出部16と、誘導状態算出部16が算出した姿勢角及び横位置と、自車両の現在の姿勢角、横位置及びヨーレートに基づき、誘導経路を生成する誘導経路生成部18と、誘導経路を自車両が走行するための目標操舵角を算出する目標操舵角算出部22と、現在操舵角を検出する操舵角センサ20と、目標操舵角と現在操舵角との差分である操舵角偏差を算出する操舵角偏差算出部24と、操舵角偏差を縮小させるための操舵支援トルクを算出する操舵支援トルク算出部26と、操舵支援トルクを操舵輪へ出力する操舵支援トルク出力部32を備える。
(もっと読む)
電動パワーステアリング制御装置

【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
電動パワーステアリング装置
【課題】2系統のトルクセンサのうち異常が発生しているトルクセンサを特定でき、かつ、異常が検出されていない側のトルクセンサの検出値に基づいて、安全に操舵アシストを継続できるようにする。
【解決手段】異常検出部110は、推定トルク演算部200により算出した推定トルクTrxと、トルクセンサトルクにより検出した操舵トルクTr1,Tr2との偏差(|Tr1−Trx|,|Tr2−Trx|)を信頼度として設定する。そして、信頼度が小さい方のトルクセンサにより検出した操舵トルクを使って目標アシストトルクTas*を設定する。この場合、アシストトルク制限部160により、信頼度Cに応じたアシスト制限を行う。
(もっと読む)
車両用操舵装置
【課題】運転者に違和感を与えることなく中立ズレを補正することが可能な車両用操舵装置を提供する。
【解決手段】所定の減速比を介して接続された複数の回転要素が、共通速度線図上に、ステアリングホイールと、第1モータ20aと、第2モータ53と、操向輪を転舵する転舵用出力要素が接続された車両用操舵装置において、ステアリングホイールの目標操舵状態量を設定する目標操舵状態量演算部122aと、目標操舵状態量に基づいて転舵用出力要素の目標転舵状態量を設定する目標転舵状態量演算部122bと、目標操舵状態量演算部122aにより設定された目標操舵状態量と、目標転舵状態演算部122bにより設定された目標転舵状態量に基づいて、第1モータ20aと第2モータ53の制御量を設定する目標モータ制御量演算部と、を設けた。
(もっと読む)
サスペンション制御装置
【課題】段差乗り越えにより大きなストロークステアが発生した場合や急旋回により大きなロールステアが発生した場合においても、ハンドル操舵角に対する横加速度又はヨーレートの変化の線形性を確保することを可能とするサスペンション制御装置を提供する。
【解決手段】車両10の姿勢変化の抑制制御を行うダンパ58を制御するダンパ制御部92と、前輪12の舵角を変更する前輪舵角変更機構32と、後輪14の舵角を変更する後輪舵角変更機構28と、車両10の走行時に生じる車輪12、14のステア速度dRが舵角変更機構28、32の車輪12、14の舵角変更速度以上であるか否かを判定するステア速度判定部88と、を備え、ステア速度判定部88にてステア速度dRが舵角変更速度以上であると判定された場合に、ダンパ制御部92は、ダンパ58による車両10の姿勢変化の抑制制御を強める。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ10が、回避制御を実行するべきと判定した時点における自車両1の運転者の車両操作量に基づいて回避制御の動作範囲を設定し、設定された回避制御の動作範囲内で自車両1が障害物Oと接触することを回避する走行経路を回避経路として算出し、算出された回避経路に沿って走行するように運転者の車両操作を支援する。これにより、個々の運転者によって異なる回避操作の許容範囲を反映した回避制御を行うことができるので、運転者が回避制御に対して感じる違和感を低減することができる。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】車両起因による片流れの抑制を精度良く行うことができる車両用操舵装置及び車両用操舵方法を提供する。
【解決手段】車両の直進走行状態を検出したときの転舵トルクTpの履歴に基づいて、直進走行時の転舵トルクTpを打ち消す方向の片流れ抑制操舵補助トルクを操舵系に付与する片流れ抑制制御を行う。このとき、操舵トルクTとヨーレートφとの差|T−φ|が所定の閾値TH1以上であるときには、操向輪の転舵に対して車両挙動が遅れている状態であると判断する。そして、この場合には、車両の直進走行状態を非検出として、そのときの転舵トルクTpを上記履歴に含めない。
(もっと読む)
移動体の運動制御用センサシステムおよび運動制御システム
【課題】移動体のコーナーリング時の走行安定性制御に適切な移動体の運動制御用センサシステムおよび運動制御システムを提供する。
【解決手段】移動体のばね下に物理量センサを設置することで、ばね下における物理量をばねを介さず検出できるようにした。移動体のばね下に働く加速度を検出する加速度センサ(加速度センサヘッド131)は、検出軸が移動体の操作軸(転舵軸S)に交わるように設置することで、操作軸周りの角加速度による加速度が検出されないようにした。
(もっと読む)
車両用操舵装置
【課題】据え切り時に舵取機構に加わる大負荷を軽減し、小型化及び軽量化を達成し得る車両用操舵装置を提供する。
【解決手段】操舵用の車輪1,1を車体10に懸架するサスペンションアーム11,11を、少なくとも前後部及び左右部の剛性を各別に変更可能な支持ブッシュ13,13により支持し、転舵角センサ50及び車速センサ51の検出結果に基づいて据え切り状態にあると判定した場合、操舵制御部5の動作により支持ブッシュ13,13の剛性を部分的に増減制御して、据え切り時の転舵によって車輪1、1が路面上を転がり、転がり抵抗下での路面反力が舵取機構2に負荷されるように構成する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】ハンドル戻し制御を行う舵角の中点をカウンター方向にオフセットし、カウンターステア方向へのハンドル操舵の動作を行い易くすると共に、運転者に車両の状況を認識させ、安全な舵角に導くことができる信頼性の高い電動パワーステアリング装置の制御装置を提供する。
【解決手段】操舵トルクに基づいて演算された電流指令値により、車両のハンドルの操舵に操舵補助力を付与するモータを駆動制御する電動パワーステアリング装置の制御装置において、オーバーステアを検出するオーバーステア検出手段と、ヨーレートに基づいてハンドルの中点に対するオフセット量を算出するオフセット量算出手段と、舵角、舵角速度、車速、ヨーレートに基づいて反力トルクを算出する反力トルク算出手段とを設け、オーバーステアが検出されたとき、オフセット量及び反力トルクに基づいて電流指令値を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】バッテリから取り出される電流が増大してバッテリの出力電圧が低下したときに、電動パワーステアリング装置の昇圧装置がさらに電流を流入させることで、バッテリから取り出す電流がさらに増大し、バッテリにかける負荷を増大させるという問題がある。
【解決手段】昇圧装置に流入する電流が第1の境界電流IS1以上のときには、入力電圧VINが、第1の境界電圧VS1より低くなったときに、昇圧装置からの出力電圧VOを、定格の昇圧電圧VMより低い電圧VMLに不連続に低下させる。さらに、入力電圧VINが、第1の境界電圧VS1より低い第2の境界電圧VS2より低くなったときに、入力電圧VINと等しい出力電圧VOを出力することを特徴とする。
(もっと読む)
車両用操舵装置
【課題】 クラッチが締結された状態から、クラッチの締結を解除してステア・バイ・ワイヤ制御に移行する際のハンドル取られを防止できる。
【解決手段】 転舵機構8と操舵ハンドル1とを機械的に連結可能なクラッチ5を備え、このクラッチ5の締結解除状態のとき、操舵ハンドル1の操舵に応じて転舵機構8を駆動するステア・バイ・ワイヤ制御を行い、クラッチ5が締結された状態から、クラッチ5の締結を解除してステア・バイ・ワイヤ制御を行う際に、転舵機構8の回転軸であるピニオンシャフト17と操舵ハンドル1の回転軸であるプーリシャフト79との間に、クラッチ5の係合解除方向の回転角偏差を与える。
(もっと読む)
操舵システム
【課題】後輪を操舵可能な車両において、前輪操舵に加えて後輪も操舵した場合に、運転者が不自然な操舵フィーリングを感じるという問題がある。
【解決手段】後輪のトー角に基づいて、電動パワーステアリング装置のダンピング制御をする。すなわち、車両が旋回するときに、後輪がトーアウトするときは、補償値Iを大きくして反力を大きくし、後輪がトーインするときは、補償値Iを小さくして反力を小さくすることを特徴とする。
(もっと読む)
左右独立操舵装置
【課題】既存の車両の大幅改修や専用車両の開発を要することなく、小型で且つ信頼性の高い左右独立操舵装置を提供する。
【解決手段】左右の前輪に、それぞれ、ボールネジ式のリニアアクチュエータからなる小型の伸縮機構部25を介して軸方向に伸縮可能なタイロッドを連結する。伸縮機構部25は、タイロッド13のタイロッドエンド13aが固設される本体部26と、この本体部26に略垂直に取り付けられたアクチュエータとしての電動モータ27とを主として構成され、タイロッド13の他端がステアリングロッド15aに連結され、伸縮機構部25を介して軸方向に進退動するピストンロッド13bとして形成されている。これにより、伸縮機構部25を、タイロッド周辺のサスペンションアーム類やスタビライザ等を避けてタイヤホイール22内に搭載可能とし、小型で且つ信頼性の高い左右独立操舵装置とすることができる。
(もっと読む)
車両用操舵装置
【課題】 複数の操舵駆動系を備え、フェールセーフ機能の向上を図った車両用操舵装置を提供すること。
【解決手段】 操舵力を付与する第一の操舵駆動系9及び第二の操舵駆動系10を備え、平常時において、第一の操舵駆動系9により操舵力を付与する。また、第二の操舵駆動系10に、車両の道路上の横位置に応じた操舵制御値を入力し、第一の操舵駆動系9が故障した際に第二の操舵駆動系10により操舵力を付与する。第一の操舵駆動系9が故障した際に、車両の横位置に応じて第二の操舵駆動系10を制御することができるため、車両を安全な場所まで移動させることが可能となり、フェールセーフ機能の向上を図ることができる。
(もっと読む)
車両用操舵装置
【課題】低μ路においても速やかに車両姿勢の安定化を図ることのできる車両用操舵装置を提供すること。
【解決手段】IFS制御演算部35は、上記OS制御中の運転者によるカウンタ操舵を検出するカウンタ操舵検出手段としてのカウンタ操舵検出部77を備える。また、車両モデル演算部61は、車両が定常円旋回にある場合の目標状態量の値(定常円旋回値Ry0_cy,θsp0_cy)を演算する定常円旋回値演算部78を備えるとともに、同車両モデル演算部61には、カウンタ操舵検出部77の出力するカウンタ信号S_csが入力される。そして、車両モデル演算部61は、このカウンタ信号S_csがカウンタ操舵の終了を示す場合、その車両モデル演算の基礎となる該目標状態量(目標ヨーレイトRy0及び目標スリップ角θsp0)の前回値Ry0_b,θsp0_bを該前回値よりも反カウンタ方向を示す値に置換する。
(もっと読む)
車両用操舵装置
【課題】運転者によるカウンタ操舵の戻し遅れに起因するカウンタ量の過剰を回避して速やかに車両安定化を図ることのできる車両用操舵装置を提供すること。
【解決手段】IFSECU8側のマイコン33に設けられたIFS制御演算部35には、カウンタ操舵判定手段としてのカウンタ操舵判定部が備えられ、同IFS制御演算部35は、OS制御中のカウンタ操舵があり、且つ車両のヨーモーメントが安定方向に変化した場合には、カウンタ補正制御を行うべき旨を示すカウンタ補正信号S_csを出力する。そして、EPSECU18は、カウンタ補正信号S_csの入力に基づいて、操舵系に付与するアシスト力を低減すべくEPSアクチュエータの作動を制御する。
(もっと読む)
車両の方向指示装置
【課題】車両の方向指示装置において、方向指示入力手段の機械的な連結構造を不要とし、操舵輪に対するウインカの自動タイミングを好適にすることにある。
【解決手段】操舵機構の機械的な作動機能の作動量及び作動方向を含む作動状態を検知する作動検知手段を設け、制御手段のキャンセル手段は、作動検知手段の検知した操舵機構の作動状態に基づいて作動機能の作動に対する方向指示出力のキャンセルタイミングを設定する。
(もっと読む)
車両の操舵装置
【課題】 ステアリングバイワイヤ方式の車両の操舵装置において、操舵ハンドルと転舵輪とを選択的に接続する断続器の異常を簡単かつ的確に検出する。
【解決手段】 チェック用ECU45は、転舵用電動モータ22が停止している状態で、ステップS11にて電磁クラッチ31を切断状態に制御し、ステップS12にて操舵角θ、操舵トルクTを入力する。ステップS13にて、操舵トルクTが目標トルクTo以下であるか否かを判定し、トルクTがトルクTo以下であればステップS14に進む。そして、異常フラグMBFをクラッチ31に異常の正常を表す”0”に設定する。一方、ステップS13にて、トルクTがトルクToよりも大きければステップS15に進む。そして、フラグMBFをクラッチ31の異常を表す”1”に設定する。ステップS16の処理により、この異常判定は操舵角θが所定の操舵角θo以下であるときに実行される。
(もっと読む)
1 - 20 / 42
[ Back to top ]