
Fターム[3D232DC35]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 判定基準(a、b)を有するもの (3,077) | 判定基準の種類 (2,725) | a≦X≦b(X:変数) (266)
Fターム[3D232DC35]に分類される特許
1 - 20 / 266
道路形状推定装置及びプログラム
運転集中度基盤の車線維持制御装置およびその方法
車両用操舵装置
車両操舵制御システム
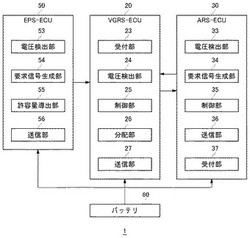
【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
車両用操舵装置

【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
油圧式パワーステアリング装置
【課題】切り込み状態から操舵部材が中立位置に向かって戻される場合に、切り込み方向の操舵補助力が不足するのを抑制できる油圧式パワーステアリング装置を提供する。
【解決手段】ダンピング制御部62は、検出操舵トルクThの方向が切り込み方向でありかつその大きさ(絶対値)が第1の閾値以上であり、操舵角速度ωhの方向が切り戻し方向でありかつその大きさ(絶対値)が第2の閾値以上のときに、操舵角速度ωhに応じたダンピングトルク指令値TD*を設定する。加算部63は、基本アシストトルク指令値設定部61によって設定される基本アシストトルク指令値TAO*に、ダンピング制御部62によって生成されるダンピングトルク指令値TD*を加算する。
(もっと読む)
車両用操舵装置
【課題】簡単な構造で安価に操舵反力を発生できる車両用操舵装置を提供すること。
【解決手段】例えば左操舵される操舵部材2によって伝達機構14を介して第1回転方向X1に駆動された空気圧縮機5が、第1ポート51を吸込口とし、第2ポート52を吐出口とする。空気供給口24からの空気が、吸込口となっている第1ポート51に供給される。吐出口になっている第2ポート52から吐出された圧縮空気は、第2可変絞り20、第2逆止弁18、高圧部16aの分岐部29、上流側還流路30、方向制御弁28および第1下流側還流路32を介して、吸込口となっている第1ポート51に還流される。操舵部材2に、空気圧縮機5の駆動の反力による操舵反力が付与される。
(もっと読む)
電動パワーステアリング装置
【課題】不良品を市場に出荷するのを防止することができると共に、安全な状態の内に部品を交換して、安全性や快適性を高めることのできる電動パワーステアリング装置を提供する。
【解決手段】コントロールユニット30Bを具備した電動パワーステアリング装置において、それぞれに割り当てられた診断時間の間、各部の異常診断を行い、検出した異常が確定した異常である場合は異常確定信号を出力し、検出した異常が確定には至らない不確定異常である場合は不確定異常信号を出力する複数の異常診断手段を設け、コントロールユニットに接続された検査装置50からコントロールユニットに電力を供給して、異常診断を実行するようになっており、検査装置は、複数の異常診断手段からの不確定異常の検出カウント値を記憶する機能と、確定した異常が発生する可能性の程度を判断する機能とを具備している。
(もっと読む)
制御装置およびフォークリフト
【課題】装置構成の大型化およびコスト増加を抑えつつ、意図しない旋回を防止できるようにする。
【解決手段】検出ヨーレートが想定ヨーレートの所定範囲外となるような場合に(s160)、検出ヨーレートの作用による本体2の旋回を相殺する方向へ駆動輪53を操舵させるべく操舵トルクを付与しているため(s180)、これにより検出ヨーレートが想定ヨーレートに近い値となる結果、意図しない旋回を防止することができる。このとき、検出ヨーレートを、実際のステアリング51の操作に応じたヨーレートである想定ヨーレートと所定範囲以内に近似させることにより、効果的に意図しない旋回が防止される。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
車両姿勢制御装置
【課題】タイヤのグリップ状態およびスリップ状態の双方において、車両仕様の変更による影響を受けることなく、目標方向に対する車両の進行方向のずれを小さくすることのできる車両姿勢制御装置を提供する
【解決手段】ヨーレートセンサの出力を「実ヨーレートγ」とし、車両1の左右中心軸C上に存在する任意の基準点において、進行方向DFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「車体すべり角β」とし、目標方向BFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「目標すべり角β*」とし、目標すべり角β*と車体すべり角βとの差(β*−β)を「角度差Δβ」とする。所定の目標方向BFに対する車両1の進行方向DFの角度を制御するために、車両姿勢制御装置は、角度差Δβの符号と実ヨーレートγの符号との関係に応じて車両1の前輪31,32および後輪33,34の少なくとも一方を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、複数種類の変量をそれぞれ検出する複数種類の変量検出手段を備え、制御部は、それぞれの検出値の絶対値が所定の範囲内にあり、かつ、それぞれの検出値の今回値の絶対値が前回値の絶対値より小さいことを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、操舵角センサ31により検出した操舵角に基づき基準伝達比を算出する。ECU40は、算出した基準伝達比をラック6の位置に基づき補正することで補正伝達比を算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準伝達比の値がより小さくなるよう補正することで補正伝達比を算出する。ECU40は、ラック6の位置に基づき前記基準伝達比または前記補正伝達比のいずれかを伝達比として決定する。ECU40は、決定した伝達比に基づき第1アクチュエータ22の駆動を制御する。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、トルクセンサ31により検出した操舵トルクに基づき基準補助トルクを算出する。ECU40は、算出した基準補助トルクをラック6の位置に基づき補正することで補正補助トルクを算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準補助トルクの値がより小さくなるよう補正することで補正補助トルクを算出する。ECU40は、ラック6の位置に基づき前記基準補助トルクまたは前記補正補助トルクのいずれかを補助トルクとして決定する。ECU40は、決定した補助トルクに基づきアクチュエータ52の駆動を制御する。
(もっと読む)
パワーステアリング装置
【課題】簡単な構造でシミーを効率的に抑制することができるパワーステアリング装置を提供する。
【解決手段】パワーアシストバルブ8とパワーシリンダ2Pとを連通した2本のシリンダ配管2C1、2C2の途中に2連式開閉バルブ10を設ける。2連式開閉バルブ10は、第1シリンダ配管2C1と第2シリンダ配管2C2とに跨がって取り付け、両シリンダ配管2C1、2C2を同時に開閉する簡単な構造となる。ハンドル3が中立状態で制御油圧が発生されない状態での高速走行時に、第1、第2シリンダ配管2C1、2C2を二連式開閉バルブ10で遮断し、パワーシリンダ2Pの第1、第2油室2P2、2P3内の作動油を封じ込めてラック21をロック状態とする。これにより、操舵輪6に入力された路面振動がハンドル3に伝わってシミーとなるのを抑える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】走行時におけるステアリングのふらつきを抑制することで、予期せぬ旋回を防止して旋回性や直進性を向上させることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作角度に応じて回転軸の角度が変更される後輪12と、ステアリングホイール16の操作角度を検出するエンコーダE11と、エンコーダE11の検出結果が過去の一定期間(遊び期間)に亘って予め設定された範囲(遊び範囲)内に収まっている場合には、ステアリングホイール16の操作角度をエンコーダE11の検出結果で示される操作角度に固定して後輪12を制御する制御装置34とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を損なうことなく、効果的にモータ電流を抑制することが可能な電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、γ軸電流指令値Iγ*の上限値(電流指令上限値Ilim)を演算する電流指令上限値演算部73と、γ軸電流指令値Iγ*を電流指令上限値Ilim以下に制限する電流指令値制限部74とを備える。そして、電流指令上限値演算部73は、車速Vが速いほど、より低い値となるように電流指令上限値Ilimを変更(演算)する。
(もっと読む)
電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】第2制御部は、目標操舵トルクτ*に実際の操舵トルクを追従させるべく、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより制御上の仮想的な回転角を演算する。また、第2制御部は、トルク偏差Δτに基づくγ軸電流増減値ηを演算し、当該γ軸電流増減値ηを積算することによりγ軸電流指令値Iγ*を演算する。そして、上記制御上の回転角に従う回転座標系において電流フィードバック制御を実行する。更に、第2制御部(電流指令値演算部61)は、上記γ軸電流指令値Iγ*を電流指令上限値以下に制限する電流指令値制限部73を備える。そして、当該電流指令値制限部73は、上記トルク偏差Δτに基づいて電流指令上限値を変更する。
(もっと読む)
1 - 20 / 266
[ Back to top ]