
Fターム[3D232DD07]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 伝達関数 (123)
Fターム[3D232DD07]に分類される特許
1 - 20 / 123
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
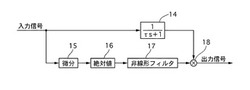
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
電動パワーステアリング制御装置

【課題】制御系全体の安定化のために制御系に設ける補償機能を簡素な構成で実現できるようにすることを目的とする。
【解決手段】目標アシストトルク演算部20にて目標アシストトルク(目標電流)を演算し、モータ6の実電流Imをその目標電流に一致させるための電流指令である基本指令を電流制御部120が演算する構成において、目標アシストトルク演算部20に位相補償器を設けていた従来の構成に対し、目標アシストトルク演算部20には位相補償器を設けず、代わりに電流制御部120に対して電流安定化補償器31をアドオンする。電流安定化補償器31は、伝達関数がs(微分演算子)の4次以下の関数で表されるものであり、実電流Imに基づき、制御系全体を安定化させるための補償指令を生成する。そして、基本指令が補償指令によって補償されてなる電流指令が、駆動回路130に入力される。
(もっと読む)
電動パワーステアリング制御装置
【課題】路面負荷に応じた操舵反力の特性の実現と、車両全体としての適切な操作安定性の実現とを両立させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】ベースアシスト部20は、路面反力に応じた操舵反力がハンドル側に返ってくるようにするためのベースアシスト指令Tb*を生成し、補正部30は、車両の不安定な挙動が適切に収斂するようにベースアシスト指令Tb*を補正するための補正トルク指令Trを生成する。そして、これら各指令Tb*,Trの和が最終的なアシストトルク指令Taとなる。ベースアシスト部20は、自身が生成したベースアシスト指令Tb*と実際に検出された操舵トルクTsに基づいて路面負荷を推定し、その推定した推定負荷Txに基づいて目標操舵トルクTs*を生成し、その目標操舵トルクTs*と操舵トルクTsの偏差に基づいてベースアシスト指令Tb*を生成する。
(もっと読む)
電動パワーステアリング装置
【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
車両用操舵装置
【課題】タイヤの横力に応じた反力をドライバに返すことにより、優れた操舵フィーリングを持つ車両用操舵装置を提供する。
【解決手段】操舵トルクを検出するためのトルクセンサ13と、車速を検出するための車速センサ14と、操舵補助力を発生するための操舵補助電動モータ20と、トルクセンサ13の検出操舵トルク及び車速センサ14の検出車速とに基づいて操舵補助電動モータ20を駆動制御するEPS制御部21とを備える。EPS制御部21は、操舵トルクと車速とに基づいてタイヤの横滑り角βを推定し、推定されたタイヤの横滑り角βと検出車速とを用いてタイヤの横力Fyを推定する。さらに、トルクセンサ13の検出操舵トルクに基づいて、ステアリング機構に対応する所定の伝達関数を用いて、タイヤの横力Fy′を推定する。これらのタイヤの横力Fy,Fy′を合わせて、互いに補間させる。
(もっと読む)
車両用操舵装置
【課題】タイヤの横力に応じた反力をドライバに返すことにより、優れた操舵フィーリングを持つ車両用操舵装置を提供する。
【解決手段】操舵トルクを検出するためのトルクセンサ13と、車速を検出するための車速センサ14と、操舵補助力を発生するための操舵補助電動モータ20と、トルクセンサ13の検出操舵トルク及び車速センサ14の検出車速とに基づいて操舵補助電動モータ20を駆動制御するEPS制御部21とを備える。EPS制御部21は、操舵トルクと車速とに基づいてタイヤの滑り角βを推定し、推定されたタイヤの滑り角βと検出車速とを用いてタイヤの横力Fを推定する。推定されたタイヤの横力Fに基づいてアシスト量を調整し、操舵補助電動モータ20を駆動する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
電動パワーステアリング装置
【課題】パワーステアリング構成物、若しくは車両前部構成物等の機械系の共振周波数成分に基づく振動、若しくは騒音の発生をも抑制し得る電動パワーステアリング制御装置を提供する。
【解決手段】電動パワーステアリング装置は、運転者の操舵トルクを補助するアシストトルク10を発生させる制御装置と、トルクセンサ23に内蔵されるバネ共振系とは異なる構成物の機械共振周波数成分を除去し得る共振周波数帯除去手段40を備えている。
(もっと読む)
電動パワーステアリング装置
【課題】イナーシャ補償信号、ダンパ補償信号、および、ベース信号相互間の影響を低減する。
【解決手段】少なくとも操舵トルクに応じて、ベース信号(DT)を演算するベース信号演算部220と、電動機の回転速度もしくは操舵速度に応じて、ダンパ補償信号を演算するダンパ補償信号演算部225と、ダンパ補償信号およびイナーシャ補償信号がベース信号を補償して定められた目標信号によって電動機が駆動され、操舵補助力を付与する電動パワーステアリング装置において、少なくとも操舵トルクに基づいてイナーシャ補償信号を演算するイナーシャ補償信号演算部215を備え、このイナーシャ補償信号演算部の特性は、微分手段の特性と信号安定性向上手段の特性とに分割され、ベース信号をダンパ補償信号で補償した補償信号と微分手段とを加算する加算器250が備えられ、信号安定性向上手段は、加算器の出力側に配置される。
(もっと読む)
電動パワーステアリング装置
【課題】保舵時のハンドルの振動や騒音を低減できるとともに通常操舵時の操舵性能も確保できるようにした操舵フィーリングの良い電動パワーステアリング装置を提供する。
【解決手段】モータ108と、車速及びトルクに基いて電流指令値を決定する電流指令値決定手段Bと、モータ電流を検出する電流検出手段202と、電圧指令値を出力する電流制御手段Aとを備える電動パワーステアリング装置であって、ハンドルの操舵状態を検出し、保舵状態と検出された時に保舵信号を電流制御手段Aに出力し、通常操舵状態と検出された時に保舵信号を出力しないようにする操舵状態検出手段30を更に備え、電流制御手段Aでは、電流指令値とモータ電流との偏差を入力とし、操舵状態検出手段30で検出された操舵状態に応じて電流制御応答性を切り替え、切り替え後の電流制御応答性と前記偏差とに基づいて電圧指令値を決定する。
(もっと読む)
車両の後輪操舵制御装置
【課題】 旋回走行時の加減速に起因する旋回特性の変化を適切に抑制することができる車両の後輪操舵制御装置を提供する。
【解決手段】 自動車100の後輪3rl,3rrを転舵する後輪操舵アクチュエータ8l,8rを備えた車両の後輪操舵制御装置5であって、少なくとも前輪舵角δf(目標前輪舵角δft)、車速Vおよび前後加速度Gxを含む車両の運動状態量を検出する運動状態量検出手段(操舵角センサ12,車速センサ21,前後加速度センサ22)と、少なくとも前輪舵角δfおよび車速Vから、車両モデルに基づいて目標旋回挙動を設定し、当該目標旋回挙動に基づいて目標後輪舵角δrを設定する目標後輪舵角設定部32とを有し、前記車両モデルは、車両のスタビリティファクタAに基づいて設定され、スタビリティファクタAは、車速Vおよび前後加速度Gxに基づいて補正されることを特徴とする。
(もっと読む)
電動パワーステアリング装置およびその制御方法
【課題】制御系における発振を抑制し、安定性と応答性を向上させることができる技術を提供する。
【解決手段】ステアリングホイールに連結される第1の回転軸と、転舵輪を転舵させるラック軸と、ラック軸を直線移動させる第2の回転軸と、トーションバーと、ステアリングホイールの操作に対するアシスト力を付与する電動モータと、ステアリングホイールの操舵トルクを検出する操舵トルク検出手段と、操舵トルク検出手段が検出した操舵トルクに基づいて電動モータに供給する目標電流を設定する目標電流算出部20とを備え、目標電流算出部20は、トーションバーをバネ要素として、電動モータ、第2の回転軸およびラック軸を慣性要素として含む制御系の共振周波数成分を抑制する共振補償部27を操舵トルク検出手段の出力側に有し、共振補償部27にて共振周波数成分が抑制された操舵トルクに応じて目標電流を設定する。
(もっと読む)
車両の操舵装置
【課題】 車両の横方向に加わる外乱による挙動変化に伴って発生する横加速度を適切に寄与させて車輪を転舵制御する車両の操舵装置を提供すること。
【解決手段】 目標横加速度演算部101は、目標とするθMA−γ特性を実現するθMA−G特性に基づいて設定されるフィルタX(s)と操舵角θMAとを乗算して、目標横加速度G*を計算する。フィードフォワード演算部102は、目標横加速度G*に基づいてフィードフォワード制御値δffを演算する。横加速度偏差演算部103は、目標横加速度G*と実横加速度Gとの偏差ΔGを計算し、PI制御部104が偏差ΔGに応じたフィードバック制御値Δδfbを演算する。そして、目標転舵角演算部105は、制御値δffと制御値Δδfbとを加算して目標転舵角δ*を計算する。
(もっと読む)
電動パワーステアリング装置
【課題】良好な操舵フィーリングが容易に得られるようにすることができる電動パワーステアリング装置を提供する。
【解決手段】セルフアライニングトルクTxを推定し、アシスト比率決定部121にて、セルフアライニングトルクTxに応じてセルフアライニングトルクTxのうちモータ6が負担する比率(アシスト比率)Rを決定する。このアシスト比率RとセルフアライニングトルクTxとを乗じた値を基本アシスト要求値Tbとし、この基本アシスト要求値Tbに安定化のための補償量δTを加えた値をアシストトルクの指令値Ta*とする。この構成により、基本アシスト要求値Tbを算出するためのチューニングパラメータが、セルフアライニングトルクTxとアシスト比率Rとの間の対応関係のみであり、しかも、この対応関係は動特性を持たないので、良好な操舵フィーリングが得られるように設計することが極めて容易となる。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御する。
【解決手段】切換制御部40は、モータ3の回転角速度ωに応じて第1モードと第2モードとの間で制御モードを切り換える。第1モードでは、仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。一方、操舵トルクTがフィードバックされ、指示操舵トルクT*に操舵トルクTを近づけるように、加算角αが生成される。この加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。第2モードでは、検出操舵トルクTに応じて二相指示電流値Idq*が設定されるとともに、誘起電圧推定部27などの働きによってロータの回転角が推定される。この推定により求められた推定回転角θEを用いてモータ3の制御が行われる。
(もっと読む)
車両用ステアバイワイヤシステムと車両用ステアバイワイヤシステムの制御方法
【課題】車両用ステアバイワイヤシステムにおいて、ステアバイワイヤシステムでありながら油圧式パワーステアリングシステムに近い操舵フィーリングを達成できるステアバイワイヤシステムを提供すること。
【解決手段】操舵装置のモータ11のトルク推定回路13は、モータ11に加えられた入力トルクの推定トルクT^i1を算出する。その推定トルクT^i1は、(A1−1)倍されてモータ11へ伝達される。転舵装置のモータ21のトルク推定回路23は、モータ21に加えられた入力トルクの推定トルクT^i2を算出する。その推定トルクT^i2は、A2倍されてモータ11へ伝達される。またモータ11のロータ位置θ1とモータ21のロータ位置θ2との偏差は、A3倍されてモータ21へ伝達される。
(もっと読む)
ステアリング装置、ステアリング制御方法
【課題】路面反力の周波数特性に起因した、操舵反力の不足を補償する。
【解決手段】運転者のステアリング操作に応じて操向輪を転舵制御する際に、操向輪の路面反力を検出し、検出した路面反力に応じてステアリング操作系に操舵反力Trを付与するものであって、検出した路面反力に対して、車速Vが高いほどゲインを大きくし且つ位相を進ませる非干渉化フィルタ処理を実行することにより、ステアリング操作系に付与する操舵反力Trを、路面反力の周波数特性に応じて補償する。また、そのときの補償量を、ステアリング操作が切り増し時であるか切り戻し時であるかに応じて変更すると共に、所定の上限値以下に制限する。
(もっと読む)
電動パワーステアリング制御装置
【課題】モータ相電流のゼロクロス時においても、モータコイルの振動を抑制して、モータから異音が発生することを防止することのできる電動パワーステアリング制御装置を提供する。
【解決手段】モータ相電流検出回路17で検出した電流検出値iに基づいて判定したゼロクロスを基準として、所定の時間遅延して立ち上がり、所定のパルス幅及び電圧を有する電圧パルス信号を生成し、これを電圧パルス指令値として出力する電圧パルス指令値発生部14を備え、この電圧パルス指令値を加算器15でモータ制御信号に重畳してモータ駆動回路16に供給し、モータ10を駆動する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバに与える違和感を少なくし、かつ、障害物を回避した自動運転を実現することができる
【解決手段】障害物回避ポテンシャル関数演算手段24によって、現在の目標到達点と障害物との相対位置に基づいて、障害物回避のためのポテンシャル関数を演算する。目標車両運動演算手段30によって、目標追従のためのポテンシャル関数、及び演算された障害物回避のためのポテンシャル関数の和である車両制御ポテンシャル関数に基づいて、現在の車両の進行方向と目標到達点へ向かう方向との偏角及び現在の車両の位置と目標到達点との相対位置における車両制御ポテンシャル関数の勾配を演算し、車両制御ポテンシャル関数の勾配に基づいて、目標車両運動を演算する。車両運動制御手段32によって、演算された目標車両運動を実現するように、操舵装置及び加減速装置を制御する。
(もっと読む)
自動車の車両姿勢制御装置及び制御方法
【課題】タイヤに発生するタイヤ横力を直接検出し、当該タイヤ横力情報を用いて、指令値の追従性能を向上させるための自動車の車両姿勢制御装置及び制御方法を提供すること。
【解決手段】本発明に係る車両姿勢制御装置は、自動車の前後輪に装着された2つのタイヤ横力センサ内蔵ハブユニットであって、そのハブユニットの軸受に作用する荷重から前後輪のタイヤ横力を検出する2つのタイヤ横力センサ内蔵ハブユニットと、2つのタイヤ横力センサ内蔵ハブユニットから検出された前後輪のタイヤ横力、自動車の車両重心から前後輪軸の距離、及び自動車の左右の駆動力差を用いたヨーモーメント間の所定の関係式を用いてヨーレートを制御するヨーレート制御手段とを備える。
(もっと読む)
1 - 20 / 123
[ Back to top ]