
Fターム[3D232DD14]の内容
走行状態に応じる操向制御 (73,124) | 制御方式 (7,388) | 適応制御 (18)
Fターム[3D232DD14]に分類される特許
1 - 18 / 18
走行進路生成装置および走行制御装置
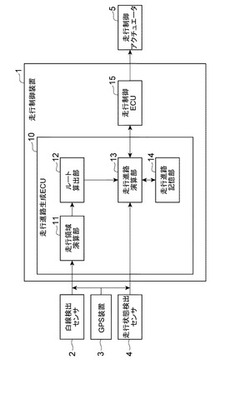
【課題】 生成した走行進路に基づいて実進路の走行を行うにあたり、実進路をスムーズなものとし、車両の乗員に与える違和感を小さくすることができる走行進路生成装置および走行制御装置を提供する。
【解決手段】 走行進路生成ECU10における走行進路演算部13は、ルート算出部12で算出したルート12に含まれる今回目標通過点と、走行進路記憶部14に記憶された前回走行進路に含まれる前回目標通過点を用いて、今回走行進路を生成する。ここで、前回目標通過点には、車両の近傍における固定目標通過点と固定目標通過点以外の探索目標通過点が含まれており、今回走行進路を生成するにあたり、固定目標通過点は固定とし、探索目標通過点を適宜今回目標通過点に変更して今回走行進路を生成する。
(もっと読む)
電動パワーステアリング制御装置

【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
デッドタイム設定方法、モータ制御装置および電動パワーステアリング装置
【課題】モータ駆動用FETの特性を測定することなく、モータ制御装置毎に好適な値を設定するデッドタイム設定方法を提供する。
【解決手段】デッドタイム設定装置は、複数のデッドタイム設定値Dnから1つのデッドタイムを順に選び(S12、S22)、選ばれるデッドタイムをモータ制御装置に設定してモータを駆動させ(S14)、そのトルクの大きさを検出し(S16)、その大きさに基づきトルクリップルの大きさを算出して(S18)記憶し(S20)、トルクリップルの大きさが最も小さくなるデッドタイムを選択して(S24)、モータ制御装置に対して最終的に設定する(S26)。そうすればモータ駆動用FETの特性を測定する困難な測定方法によらず、FETの特性ばらつきに応じたモータ制御装置毎の好適な値を簡単かつ低コストで設定することができる。
(もっと読む)
運転支援装置及び運転支援方法
【課題】車両の運転者を補助する運転支援の実行中に、車両の運転者が受ける違和感を低減すること。
【解決手段】運転支援装置20は、操作予測部21と、走行軌跡生成部22と、走行機能制御部23とを備える。操作予測部21は、車両の運転者が運転操作をすることを、前記運転者が前記運転操作をする前に予測する。走行軌跡生成部22は、操作予測部21によって予測された運転操作の予測結果を踏まえて、前記運転者が運転する車両が目標とする目標走行軌跡を生成する。走行機能制御部23は、走行軌跡生成部22によって生成された目標走行軌跡と運転者の実際の運転操作とを調停した結果に基づいて、車両の走行機能を制御する。
(もっと読む)
車両制御特性変更方法
【課題】車両の運転者が違和感を感じない連続的な制御変更となる車両制御特性変更方法を提供することを目的とする。
【解決手段】車両制御装置の車両制御特性変更方法であって、車両操作入力周波数解析部が、車両操作入力検出部で検出された操作入力から、所定の閾値周波数より小さい第一FF周波数成分割合(λ1)を算出する第一周波数解析工程と、第一周波数解析工程の後、車両操作入力検出部で検出された操作入力から、所定の閾値周波数より小さい第二FF周波数成分割合(λ2)を算出する第二周波数解析工程と、第二FF周波数成分割合(λ2)と第一FF周波数成分割合(λ1)との差(Δλ)と、第二FF周波数成分割合(λ2)と、に基づいて変更後の車両制御装置の制御特性を決定する工程とを有する車両制御特性変更方法とする。
(もっと読む)
車両制御特性変更方法
【課題】車両の運転者が違和感を感じない連続的な制御変更となる車両制御特性変更方法を提供することを目的とする。
【解決手段】車両制御装置の車両制御特性変更方法であって、車両操作入力周波数解析部が、車両操作入力検出部で検出された操作入力から、所定の閾値周波数より小さい第一FF周波数成分割合(λ1)を算出する第一周波数解析工程と、第一周波数解析工程の後、車両操作入力検出部で検出された操作入力から、所定の閾値周波数より小さい第二FF周波数成分割合(λ2)を算出する第二周波数解析工程と、第二FF周波数成分割合(λ2)と第一FF周波数成分割合(λ1)との差(Δλ)と、第二FF周波数成分割合(λ2)と、に基づいて変更後の車両制御装置の制御特性を決定する工程とを有する車両制御特性変更方法とする。
(もっと読む)
路面摩擦係数推定装置
【課題】幅広い運転領域で、レスポンス良く、精度の良い路面μを推定する。
【解決手段】路面μ推定装置10は、サンプリング時間が異なる複数のラック推力をラック推力推定値Fmsveとして検出し、このラック推力推定値Fmsveと同じタイミングで、基準とするラック推力(基準ラック推力)Fmdveを少なくとも路面μをパラメータとして含むタイヤモデルにより推定し、少なくともラック推力推定値Fmsveと基準ラック推力Fmdveとの偏差を最小とする路面μの値を最適化計算により求める。
(もっと読む)
電動パワーステアリング装置
【課題】EPSにおいて、故障時でもアシスト力を弱めることなく、最終的なアシスト停止を回避する。
【解決手段】EPSのECUは、トルクセンサのホールから得られる2つの電気的出力に基づき、電動モータへの通電を制御する。そして、ECUのマイコンは、エンジン起動時に、電動モータに通電させて相対回転変位量を発生させるとともにトルクセンサから電気的出力を発生させることで、ホールICの中で故障したものを特定する故障器特定手段として機能する。これにより、マイコンは故障器を高精度に特定することができるとともに、非故障器から得られる電気的出力に基づいて、アシスト力を弱めることなく、EPSによるアシストを続行することができる。
(もっと読む)
車両の操舵装置
【課題】その都度の車両の走行シーンにおいて、ステアバイワイヤ式ならではの理想的な操舵反力をステアリングホイールに対し付与することのできる車両の操舵装置を提供する。
【解決手段】ステアバイワイヤ式の操舵装置では、ステアリングホイール11の操舵に伴い、反力アクチュエータ15を通じて車両の状態に応じた相応の操舵反力をステアリングホイール11に付与する。この操舵装置では特に、センサ13,14,21〜23により検出される車両状態量の時系列的なデータを入力情報として隠れマルコフモデルの推定アルゴリズムを用いてそれら車両状態量の時系列的なデータに見合う車両の状態を各々走行シーンとして推定する。そして、この推定される走行シーンを単位としてステアリングホイール11の操作量に応じた操舵反力を同ステアリングホイール11に付与する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良相発生に伴う二相駆動時におけるトルクリップルの発生を効果的に抑制しつつ、高精度の異常検出を可能とするモータ制御装置を提供することにある。
【解決手段】マイコンは、通電不良相の発生時、所定の回転角θA,θBを漸近線として正接曲線状に変化するd軸電流指令値Id*を演算し、当該d軸電流指令値Id*に基づく電流フィードバック制御を実行することにより、通電不良相以外の二相を通電相としてモータ制御信号の出力を続行する。そして、その二相駆動時において、各相に設定された通電可能な最大値に基づいてその相電流値を制限すべき回転角度範囲内、即ち電流制限範囲内(θ1<θ<θ2,θ3<θ<θ4)にある場合には、当該各通電相の相電流値が上記最大値で一定となるように、d軸電流指令値Id*及びq軸電流指令値Iq*を演算する。
(もっと読む)
車両のステアリング制御装置
【課題】 未熟練なオペレータといえども高速走行時にステアリング切り直しを行わせないようにして、タイヤの寿命向上を図る。車両の仕様を変更することなく、熟練度に応じた最適な操作性が得られるようにする。未熟練なオペレータが迅速に操作技能レベルを高めていくことができる、車両の運転教育を兼ねたステアリング制御装置を市場に提供する。
【解決手段】 判定手段20では、高速走行時にステアリング切り直し操作が行われたか否かが判定される。習熟度判別手段40では、判定手段20の判定結果に基づいて、ステアリング感度の大きさを低くするか、あるいはステアリング感度を高くするかが判別される。ステアリング感度変更手段30では、習熟度判別手段40の判別結果に応じて、ステアリング感度が変更される。
(もっと読む)
電動パワーステアリング装置
【課題】精度よく次数成分のトルクリップルを低減して効果的に振動及び異音の発生を抑制することのできる電動パワーステアリング装置を提供すること。
【解決手段】マイコン17(モータ制御信号生成部24)は、入力される信号に含まれる特定の周波数成分を減衰可能な特定周波数成分減衰部31を備え、該特定周波数成分減衰部31には、モータ12に通電される実電流としてのd軸電流値Id及びq軸電流値Iqが入力される。また、この特定周波数成分減衰部31には、モータ12の回転角速度ωeが入力され、同特定周波数成分減衰部31は、当該入力される回転角速度ωeに基づいて、その減衰する特定の周波数成分を変化させる。そして、マイコン17は、その減衰処理が施された後のd軸電流値Id´及びq軸電流値Iq´に基づいて、モータ12に駆動電力を供給するための電流フィードバック制御を実行する。
(もっと読む)
操舵システム
【課題】パワーステアリング装置の補助トルク失陥時に旋回安定性の高い後輪のトー角変更制御をできるパワーステアリング装置とトー角変更装置の組み合わせ。
【解決手段】ベース信号演算部51と、ダンパ補償信号演算部52と、イナーシャ補償信号演算部53とを備え、ダンパ補償信号およびイナーシャ補償信前記ベース信号を補償して定められた目標信号IM1によって前記電動機が駆動され、操舵補助力を付与する電動パワーステアリング装置110の操舵制御装置である。目標トー角演算部71は、自己診断部72からEPS失陥の異常状態検知信号を受信したとき、通常時に用いる第1のトー角テーブル71aから第2のトー角テーブル71bに切り換えて、所定の低速の範囲を超えた車速では、旋回安定性が高まるように、後輪のトー角をトーアウトにさせない制御とする。
(もっと読む)
電動パワーステアリング装置のチューニング方法
【課題】チューニング装置によりラック推力を算出し、車両走行時の目標とする目標操舵トルクをチューニング装置に入力して、必要モータ電流値を算出してアシストマップを設定することにより、調整作業の効率と必要コストを改善する電動パワーステアリング装置のチューニング方法を提供する。
【解決手段】チューニング装置に所定のパラメータ値を設定する工程1と、目標とする目標操舵トルクをチューニング装置に入力する工程2と、センサ系の測定値に基づいて操舵トルクを測定し、測定された操舵トルクに基づきラック推力を推定する工程3と、工程1〜工程3に基づいて必要モータ電流を算出する工程4と、必要モータ電流に基づいてアシストマップを設定してチューニングする工程5とにより電動パワーステアリング装置のチューニングを行う。
(もっと読む)
転舵装置
【課題】 左右後輪のうちの一方の車輪のみが転舵異常となったときに、その状態で走行する際における車両の安定性および車両の操作性を良好にすること。
【解決手段】 転舵異常検出手段が片輪転舵異常を検出したとき(S201:NoまたはS202:No)に、車速Vが基準車速V0以下の場合(S205:YesまたはS209:Yes)には、後輪の転舵正常輪を転舵異常輪の転舵方向とは逆方向に転舵する(S208、S212)。また、車速Vが基準車速V0よりも大きい場合(S205:NoまたはS209:No)には、後輪の転舵正常輪を転舵異常輪の転舵方向と同一方向に転舵する(S208、S212)。これにより、低速走行時の操作性および高速走行時の走行安定性を両立できる。
(もっと読む)
パワーステアリング制御装置
【課題】タイヤの製造ばらつきに対応してパワーステアリング機構の操舵補助力を補正する。
【解決手段】電動パワーステアリング機構は、ドライバーによる操舵トルクに応じて電動モータを駆動し、車両のステアリング機構に操舵補助力を与える。アシストマップ記憶部108は、操舵トルクと電動モータによる操舵補助力との対応関係を予め記録したアシストマップを保持する。制御部104は、アシストマップを参照して、操舵トルクに応じた操舵補助力を発生するように電動モータに供給する電流を制御する。情報取得部110は、車両に装着されたタイヤそれぞれについてタイヤ位置情報と予め準備されているタイヤ特性情報とを取得する。補正部112は、取得した情報に基づいて、アシストマップに定義されている操舵補助力を補正する。
(もっと読む)
車両用運転支援装置
【課題】 運転者に違和感を与えず、よりわかりやすい運転支援を行うことができる車両用運転支援装置を提供する。
【解決手段】 操舵技量判定回路23により判定された技量レベルが変化したとき、運転者の技量レベルが向上または低下したかを判断する技量向上−低下判断回路25と、運転者の技量レベル向上と技量レベル低下を、それぞれ運転者へ報知する技量変化状況報知回路26と、を備える。
(もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 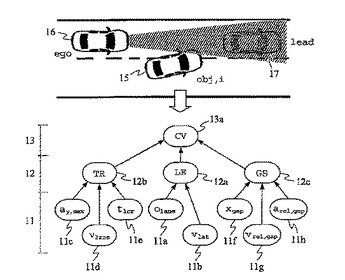 (もっと読む)
(もっと読む)
1 - 18 / 18
[ Back to top ]