
Fターム[3D232DE05]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 臨界値、限界値とするもの (350)
Fターム[3D232DE05]の下位に属するFターム
変更するもの (135)
Fターム[3D232DE05]に分類される特許
1 - 20 / 215
電動パワーステアリング装置
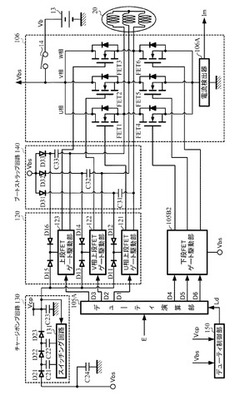
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
運転支援装置

【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】アシスト電流指令値を最大電流より小さく制限することにより安全性を高めると共に、簡単な構成で処理負荷的に有利であり、出力過多異常の誤判定を生じない高機能な電動パワーステアリング装置を提供する。
【解決手段】マイクロコンピュータと、プログラム等に基づいて制御演算処理するCPUと、記憶領域を形成するRAMと、モータのアシスト電流指令値を演算するアシスト電流演算手段と、各相電流指令値を生成する各相電流指令値生成手段とを具備し、各相電流指令値に基づいてモータをベクトル制御することによりアシストする電動パワーステアリング装置において、ROM及びRAMの領域を各所定診断周期で診断する異常診断機能と、各相電流指令値生成部の出力過多の異常を検出する異常判定部とを具備する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して安定的に高い出力性能を確保することのできるモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、所定のサンプリング周期で取得した各電流センサの出力信号に基づいて、モータの各相電流値を検出する。そして、今回の検出値とともに少なくとも前回の検出値が保持される。そして、当該二相駆動時には、今回の電流検出時における回転角と前回の電流検出時における回転角との間に漸近線に対応する所定の回転角を挟む場合には、その保持された今回の検出値及び前回の検出値について、その絶対値がより大きな値となるように補正する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(63)を有する。そして、モータの回転角度と、ローパスフィルタのゲインの関係を示すマップ(61)から演算された値により、ローパスフィルタ(63)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(63)に基づいて出力されるモータ回転角速度に基づき、モータの逆起電力により発生する電流を相殺するように、モータに電流を流す非干渉制御を実行する。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】モータ(1)の回転角度を微分してモータ回転角速度を演算するモータ回転角速度演算手段(60)と、そのモータ回転角速度を信号処理するローパスフィルタ(65)を有する。そして、モータ回転角速度を更に微分してモータ回転角加速度を演算するモータ回転角加速度演算手段(61)と、モータ回転角加速度演算手段(61)により演算された値により、ローパスフィルタ(65)のゲインを変更するローパスフィルタゲイン変更手段(80)を有する。そして、ゲインが変更されたローパスフィルタ(65)に基づいて出力されるモータ回転角速度に基づき、モータの速度起電力により発生する電流を相殺するように、モータ電圧指令値を定める非干渉制御を実行する。
(もっと読む)
モータ駆動装置、およびこれを用いた電動パワーステアリング装置
【課題】 製造時に電流制限値マップを作成するための工数を少なくし、かつ実使用時に電流制限値を変更可能なモータ駆動装置を提供する。
【解決手段】 スイッチング素子の電流制限値を変更する場合、素子温度Tが時刻t1での素子温度T1から第1目標温度T01まで変化するのに必要な温度到達時間P1、および電流制限値Eが時刻t1での電流制限値E1から第1目標電流制限値E01まで変化するのに必要な電流到達時間P2が算出される(S103)。次に、温度到達時間P1と電流到達時間P2との大小を判定する。(S104)温度到達時間P1が電流到達時間P2以下の場合、スイッチング素子の電流制限値を変更する。(S105)これにより、モータ駆動装置の製造時に電流制限値マップを作成することなく、時刻t1での素子温度T1に基づいて、スイッチング素子の状態に応じた電流制限値に変更することができる。
(もっと読む)
電動パワーステアリング装置
【課題】ラックシャフトがストッパに衝突したときに発生するステアリングシャフトの慣性トルクを小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置1は、ステアリングシャフト10と、ラックシャフト20と、ストッパ41と、ステアリングシャフト10にトルクを付与する電動モータ51と、電動モータ51の駆動電流を制御するための指令信号を出力する制御装置54とを備える。制御装置54は、ラックシャフト20がストッパ41に衝突したときにステアリングシャフト10に発生するトルクを慣性トルクとし、慣性トルクとは反対の方向のトルクを補償トルクとし、ステアリングシャフト10に補償トルクを付与する電動モータ51の駆動電流を補償電流とし、補償電流を電動モータ51に供給するための指令信号を補償指令信号として、慣性トルクが発生しているときに補償指令信号を出力する。
(もっと読む)
電動パワーステアリング装置
【課題】簡易な構成でタイヤのグリップの喪失を検出でき、グリップロス度を位相補償し、補正操舵トルク又は補正係数を演算して電流指令値を高速に補正し、車両挙動の一層の安定化が可能な電動パワーステアリング装置を提供する。
【解決手段】モータの角速度に基づいて収れん性制御信号を出力する収れん性制御部と、車両のラック軸上に生じる外力をSAT検出値として検出するSAT検出部と、路面から生じるSATを車両モデルに基づいてSAT推定値として推定するSAT推定部と、SAT検出値及びSAT推定値に基づいてタイヤのグリップが失われた度合いを表すグリップロス度を検出するグリップロス度検出部と、グリップロス度を位相補償する位相補償部と、位相補償されたグリップロス度に基づいて補正操舵トルクを演算する補正値演算部とを具備し、補正操舵トルクと収れん性制御信号とで電流指令値を補正する。
(もっと読む)
電動パワーステアリング装置
【課題】積載状態により車両重量が変化しても操舵フィーリングを低下させない電動パワーステアリング装置を提供する。
【解決手段】車両重量Wとバッテリ100のバッテリ電圧PIGは、電流制限値決定部24に入力される。電流制限値決定部24は、車両重量−最大出力制限値マップに基づいて、入力された車両重量Wに対応したモータ駆動電流の最大出力制限値を取得し、バッテリ電圧−出力電流制限値マップ上の出力電流制限値を変更する。そして、電流制限値決定部24は、上記バッテリ電圧−出力電流制限値マップに基づいて、検出されたバッテリ電圧PIGに対応する出力電流制限値Iul,Ivl,Iwlを決定し、モータ駆動電流制限手段23に出力する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ抵抗推定部27は、たとえば、加算角リミッタ24から出力される加算角αの絶対値が所定の閾値B以下であるときに、モータ抵抗Rを推定する。誘起電圧推定部28は、モータ抵抗推定部27によって推定されたモータ抵抗Rを用いて、モータ3の回転によって生じる誘起電圧を推定する。回転角推定部29は、誘起電圧推定部28によって推定された誘起電圧に基づいて、ロータ50の回転角の推定値θEを演算する。ロータ角変位演算部30は、演算周期間の推定回転角θEの変化量を求めることによって、演算周期当たりのロータ50の角変位Δθを求める。加算角ガード41は、必要時において、ロータ角変位演算部30によって求められるロータ角変位Δθに基づいて加算角αを補正する。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備え、前記モータ相対角度情報算出部は、前記操舵トルクに基づいてモータ相対角度変化量を算出し、算出したモータ相対角度変化量を前回サンプリング時のモータ相対角度に加算してモータ相対角度を算出する補完用相対角度情報演算部を有し、前記モータ角速度が零近傍の不感帯内にあるときに、前記補完用相対角度情報演算部で算出したモータ相対角度に基づいてモータ相対角度情報を演算する。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法
【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】過熱保護の演算に誤りを検出可能な、信頼性の高いが電動パワーステアリング装置を提供する。
【解決手段】モータに流れる電流値を制限する過熱保護電流値を演算する過熱保護電流値演算ユニット132と、前記演算された過熱保護電流値に基づいて前記モータに流れる電流値を制限し、前記モータに流れる電流値による発熱を抑制して車載機器を保護する過熱保護制御ユニットとを備え、前記演算された過熱保護制限電流値に関連する情報を記憶し、今回演算した過熱保護電流値と前記記憶されている過熱保護電流値に関連する情報との比較に基づいて、前記今回の演算による過熱保護電流値の異常の有無を判定するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータに過剰に電流が流れることに起因して電動モータが故障することを抑制する技術を提供する。
【解決手段】電動モータへ実際に供給される実電流を検出するモータ電流検出部と、操舵トルクに応じて定められた目標電流とモータ電流検出部にて検出された実電流とに基づいてフィードバック制御を行い第1の目標値を算出する第1の制御部と、操舵トルクに応じて定められた目標電圧が予め定められた所定範囲内である場合にはこの目標電圧を、所定範囲外である場合には予め定められた所定値を出力する電圧制限部316を有し、電圧制限部316からの出力値に基づいて第2の目標値を算出する第2の制御部300と、第1の目標値または第2の目標値に基づいて電動モータの駆動を制御するモータ駆動制御部と、モータ電流検出部の異常を把握しない場合には第1の目標値に基づき、異常を把握した場合には第2の目標値に基づくように目標値を切り替える切替部と、を備える。
(もっと読む)
車両用故障診断装置
【課題】車両運転者が、バイワイヤシステムの故障検出のために必要な操作を容易に行うことができる技術を提供
【解決手段】バイワイヤ制御部15は、起動スイッチのオン後に、ステアリング可動域制限部11(アクセル可動域制限部12、ブレーキ可動域制限部13)により、ステアリングST(アクセルペダルAP、ブレーキペダルBP)の操作を0°〜54°(0%〜10%、0%〜10%)の範囲内に制限する。そして、ステアリング操作量(アクセル操作量、ブレーキ操作量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)内であると判断した場合に、転舵量(駆動量、制動量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)に応じて予め設定されたステアリング正常判定範囲(アクセル正常判定範囲、ブレーキ正常判定範囲)内であるか否かを判断する。
(もっと読む)
1 - 20 / 215
[ Back to top ]