
Fターム[3D232DE11]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 遅延 (37)
Fターム[3D232DE11]の下位に属するFターム
遅延時間の設定、変更 (21)
Fターム[3D232DE11]に分類される特許
1 - 16 / 16
操舵制御装置及びプログラム
【課題】正確に目標コースを追従することができるようにする。
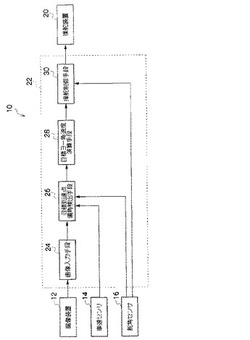
【解決手段】目標到達点偏角検出手段26によって、車両の進行方向と、車両の走行する目標コース上の予め定められた前方注視時間後の目標到達点の方向との偏角を検出する。ヨー角速度目標値演算手段28によって、目標到達点偏角検出手段26によって検出された偏角に比例するヨー角速度を、予め定められたむだ時間後の目標値として演算する。操舵制御手段30によって、演算されたヨー角速度の目標値をむだ時間後に実現するように、車両の前輪の操舵を制御する。
(もっと読む)
運転支援装置

【課題】運転者の覚醒度、及び、自車両の周辺環境に応じて、体感警報を発生させることで注意喚起を行なうことが可能な運転支援装置を提供することを目的とする。
【解決手段】自車両周辺の他車両の情報である周辺車両情報を検出すると共に、自車両の運転者の覚醒度を検出し、これらの周辺車両情報及び覚醒度に基づいて、自車両のリスクレベルを設定する。さらに、運転者が触覚を用いて認識することができる刺激を付与することで、体感警報を発生させる体感警報発生手段35,41,47を備える構成とする。これにより、設定されたリスクレベルに応じて体感警報を発生させることができ、覚醒度、及び、自車両の周辺環境に応じて、注意喚起を実行することができる。
(もっと読む)
路面摩擦係数推定装置
【課題】ノイズの影響を大きく受ける場合において路面摩擦係数を正確に推定し得るような路面摩擦係数推定装置を提案する。
【解決手段】連続値変換部B3b-1は、離散時間周波数伝達特性G(z)を連続時間周波数伝達関数G(s)に変換し、位相情報抽出部B3b-4は、所定の位相情報抽出周波数f[Hz]と連続時間周波数伝達関数G(s)とから、当該周波数f[Hz]でのヨーレート位相遅れ情報θ(f|t)[deg]を抽出する。この位相遅れ情報θ(f|t)[deg]から、予定の路面摩擦係数マップを基に、走行路の路面摩擦係数を検索する。上記位相情報抽出周波数f[Hz]を適切に決定することで、ノイズの影響を受けにくい操舵周波数における情報のみを用いたり、路面変化に対する感度が高い操舵周波数における情報のみを用いることができ、これにより、ノイズが多い場合においても、路面摩擦係数を正確に求めることができる。
(もっと読む)
操舵制御装置及びその設計方法
【課題】ステアリングの操作者に違和感を与えない操舵制御を行う。
【解決手段】制御器は、操舵制御目標値y0と操舵制御測定値yとの偏差eと、所定の周波数特性を有する伝達関数Cとに基づいて、電動パワーステアリング装置用モータの出力トルクを制御するための付加トルク指令値Tを演算する。制御器の伝達関数Cの周波数特性は、運転者の操舵トルク知覚閾値特性が変化する周波数f0よりも低い周波数範囲では微分値のゲインがほぼ一定となる積分特性であり、周波数f0よりも高い周波数範囲ではゲイン|C(jω)|がほぼ一定となる平坦特性である。
(もっと読む)
四輪操舵装置
【課題】 後輪のキャンバー角を制御するようにして構造を簡単にできる四輪操舵装置を提供する。
【解決手段】 車速センサ7およびステアリングホイールの操舵角を検出する操舵角センサ8からの信号に応じて、後輪1L,1Rを操舵する四輪操舵装置において、後輪1L,1Rには両後輪1L,1Rに同一方向のキャンバー角を付与するキャンバー角制御機構2L,2Rを連係し、このキャンバー角制御機構2L,2Rで、後輪1L,1Rに同一方向のキャンバー角を制御する。
(もっと読む)
操舵装置
【課題】実車の反力特性を適切に模擬することができ、実車の操舵フィーリングを実現することが可能な操舵装置を提供する。
【解決手段】操舵装置は、モータなどを用いて、ステアリングの操作に応じた反力トルクを付与するために好適に利用される。具体的には、反力トルク演算手段は、ステアリングへの入力回転角とステアリング系回転角との差分に基づいてトーションバーの剛性を模擬することによって、付与すべき反力トルクを演算する。つまり、トーションバーの剛性を演算上に設けて、反力トルクを演算する。これにより、演算上におけるトーションバーのねじれ分により、実際の入力回転角に対して遅れがあり、更に若干小さなステアリング系回転角を得ることができる。よって、実車の反力特性を適切に模擬することができ、実車の操舵フィーリングを実現することが可能となる。
(もっと読む)
電動パワーステアリング装置
【課題】周囲温度検出手段を用いることなく周囲温度を推定し電流制限をかけることができる電動パワーステアリング装置を提供する。
【解決手段】運転者の操舵力を補助するためのモータ1と、前記モータ1の通電量を決定し制御するコントローラと、車速検出手段12とを備える電動パワーステアリング装置において、前記車速検出手段12からの車速信号を入力とする周囲温度推定手段15を備え、前記周囲温度推定手段15からの出力に従い前記モータ1に通電する電流量を制限することを特徴とする。
(もっと読む)
車両用制御装置
【課題】エンコーダを使った回転位置の検出をさらに確実に行えるようにする。
【解決手段】車両用制御装置1は、ステアリングホイール2と共に多回転するステアリングシャフト3の回転位置を絶対値で検出する第1のエンコーダ13を有し、第1のエンコーダ13の出力が第1のカウント手段21に接続されている。第1のカウント手段21は、第1のエンコーダ13の回転数をカウントするエンコーダ回転数カウント回路31と、回転数の情報と第1のエンコーダ13のエンコーダ信号を合成してエンコーダ全体桁信号を作成するエンコーダ全体桁読み込み回路40とを有する。エンコーダ全体桁信号は、操作制御部42に入力され、操向制御や操舵制御に利用される。
(もっと読む)
運転支援装置
【課題】 車線逸脱防止制御を行うにあたり、低車速域での制御時にドライバが感じる挙動を小さくするとともに、逸脱余裕時間やドライバの反応時間、さらには警報トルクに対するフィーリングを向上させる。
【解決手段】 走行支援装置1における逸脱防止支援ECU10では、車両の車速に基づいて、操舵トルク印加手段17に印加する印加トルクを設定する。印加トルクは、車速が高いほど大きく設定する。この印加トルクには、車速に応じた上限値を設定する。さらに、印加トルクを印加する際のStart区間では、印加トルクの最大値に応じて最大値に到達するまでの変化率を決定する。また。Close区間では、Start区間と異なる変化率で印加トルクを減少させ、Start区間での印加トルクの絶対値が、Close区間での印加トルクの絶対値よりも大きくなるように設定する。
(もっと読む)
操舵制御装置、自動車及び操舵制御方法
【課題】パンク発生のインフォメーションの伝達を妨げることなく、車両に入力される定常外乱を補償することができる操舵制御装置、それを備えた自動車及び操舵制御方法を提供する。
【解決手段】車両の直進走行状態における操舵トルクの履歴に基づいて、車両に入力される外乱を推定し、推定された外乱推定値に応じて、当該外乱により発生する操舵トルクを抑制する方向へ外乱補償操舵補助力を付与する。このとき、車輪のパンクを検出した場合には、前記外乱補償操舵補助力をパンク発生時の外乱推定値まで減少補正する。
(もっと読む)
電動パワーステアリング装置
【課題】 トルクセンサの故障等によりトルク検出値が異常値を示しても代替トルク値に置換え、操舵補助力を適切に制御できる電動パワーステアリング装置を提供する。
【解決手段】 トルク検出値Tはトルク値異常検出部23、及びトルク演算部24に入力される。トルク値異常検出部23は公知のトルク診断手段によりトルク検出値Tの異常を判断して異常を検出、トルク検出値Tが異常のときは記憶装置26内に格納されている修正トルク値Te を代替トルク値として電流指令値演算部27に出力、電流指令値Ir を演算する。この後、徐変処理部28で電流指令値Ir を徐変処理し、操舵トルクの急変を抑える。トルク検出値Tが正常なときはトルク検出値Tに基づいて電流指令値を演算し、徐変処理はしない。トルク検出値Tから修正トルク値Te を演算し、記憶装置26に格納する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置の起動直後の操舵フィーリングを改善する。
【解決手段】電動モータMからステアリング機構3にステアリングホイール1の操作に応じた操舵補助力が与えられる。この装置は、操舵トルクを検出してトルク信号を生成するトルクセンサ5と、トルク信号を一定時間遅延させて遅延トルク信号を生成する遅延トルク信号生成部24と、操舵トルクに応じたモータ電流目標値を求めるモータ電流目標値設定部22と、当該装置の起動を検出する起動検出部23と、起動検出通知を受けて、モータ電流目標値に乗じるアシストゲインを設定するゲイン設定部25と、アシストゲインをモータ電流目標値に乗じて電流指令値を求める乗算部27とを備えている。ゲイン設定部25は、トルク信号および遅延トルク信号のうち、いずれか絶対値の大きな操舵トルクに対応するものを選択し、その選択されたトルク信号に従ってアシストゲインを設定する。
(もっと読む)
パワー・ステアリング装置の電気ポンプ駆動モータを制御する方法
本発明は、パワー・ステアリング装置の電気ポンプ駆動モータを制御する方法に関する。モータは、高出力段階(A)又は低出力段階(B)により動作されることができる。両方の出力段階(A,B)間の転換は、モータの電流消費に従って行われる。少なくとも1つの更なる平均出力段階(C)が、他の出力段階(A,B)間に設けられ、この平均出力段階(C)は、モータの電流消費に従って転換することができる。  (もっと読む)
(もっと読む)
制御装置およびそれを備えた電動パワーステアリング装置
【課題】割込周期がずれる異常時にも制御処理の継続が可能であり、また、正確な制御周期での制御処理を可能とする。
【解決手段】第1タイマ21は、所定の制御周期を計時してCPU30に割込を与える。CPU30は、割込を受けると、操舵トルクおよび車速に応じて電動モータを制御するための制御処理を実行する。第2タイマ22は、制御周期よりも長い異常判定周期を計時する。割込周期判定手段38は、第1タイマ21による割込発生周期が前記制御周期と一致しているかどうかを判定する。この割込周期判定手段38によって、前記割込発生周期と前記制御周期とが不一致であると判定されると、計時修正部36は、当該割込発生周期と前記制御周期との偏差に応じて、第1タイマ21の計時開始タイミングを修正する。
(もっと読む)
前後輪舵角比補正手段を備えた自動車
【課題】一対の前輪と一対の後輪とがその間に前後輪舵角比を伴って操舵される4輪操舵車に於いて、運転者による操舵に基づかない異常ヨーモーメントが車体に作用したとき、4輪操舵車に可能な操舵特性を生かして異常モーメントを打ち消し、車輌の安定走行を図る。
【解決手段】前輪操舵角、目標ヨーレート、目標スリップ角、実測ヨーモーメントに基づいて実測ヨーモーメントに対応する前後輪舵角比を算出し、前後輪舵角比を算出値に合わせるよう補正する。
(もっと読む)
路面摩擦係数の推定方法
【課題】
路面μを演算が容易で且つ実用上の精度が確保できる路面μの推定方法を提供する。
【解決手段】
路面摩擦係数μを推定する路面摩擦係数の推定方法において、舵角センサにより舵角を検出するステップと、横加速度センサにより横加速度を検出するステップと、複数の路面μi(i=1〜n,nは2以上の整数)について、各路面μiにおける舵角と横加速度の組み合わせの中で各舵角についての横加速度の下限値にて導出された境界線に基づいて各路面μi(i=1〜n)に対して舵角と横加速度から成る領域が定義された路面μ判定テーブルを参照して、舵角センサにより検出された舵角及び横加速度センサにより検出された横加速度に対応する領域を求めて、複数の路面μi(i=1〜n)の中で該領域に該当する路面μに基づいて概算のμを算出するステップと、概算のμに基づいて、推定横加速度と横加速度センサにより検出された横Gとの横加速度差分がゼロによるように路面μを微調整するステップとを具備して構成する。
(もっと読む)
1 - 16 / 16
[ Back to top ]