
Fターム[3D232EA02]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(操舵対象) (2,739) | 2WS(後輪) (46)
Fターム[3D232EA02]に分類される特許
1 - 20 / 46
操舵機構の制御装置
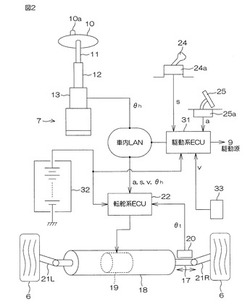
【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
車両用操舵装置及び荷役車両

【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
操舵装置
【課題】車速センサがフェールした場合であっても、操作性および操縦安定性の低下を抑制する。
【解決手段】操舵装置10は、右側操舵入力部20Rと、左側操舵入力部20Lと、車速センサ40と、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に応じて操舵輪RWを転舵する転舵機構12と、ステアリングECU30により検出された車速に基づいて、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に対する操舵輪の転舵角の比である舵角比を設定するステアリングECU30とを備える。ステアリングECU30は、車速センサ40がフェールした場合、右側操舵入力部20Rの操舵角に対する操舵輪RWの転舵角の比である第1舵角比と、左側操舵入力部20Lの操舵角に対する操舵輪RWの転舵角の比である第2舵角比とを異なる値に設定する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角が大きな範囲は、転舵速度に基づく操舵制御を実行することにより運転者の操舵負担を減らす。
【解決手段】タイヤを転舵させる転舵駆動機構と、操舵部材の操舵角を検出する操舵角センサと、操舵角が所定の切替角αを越える高角領域にあるか否かを判定し、操舵角が高角領域にあるとき操舵角センサで検出した操舵角の増減を判定する切り込み/切り戻し判定処理部(B3)と、操舵角が高角領域で増加傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が増大するように転舵駆動機構を制御し、操舵角が高角領域で減少傾向にあるとき、操舵角が高角領域にある時間に応じてタイヤの転舵角が減少するように転舵駆動機構を制御するための目標転舵角を算出する目標転舵角算出処理部(B4)とを備える。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】不必要な据え切り操作を極力させないように、意図的な据え切り以外の動作を抑制することにより、車両において無駄な電力消費を抑制する。
【解決手段】操舵部材と、車速を検出する車速検出部と、検出された車速が規定値よりも小さいかどうかを判定する車速判定部と、操舵部材に操舵反力を付与する反力モータと、転舵輪を転舵させる転舵駆動機構と、転舵駆動機構を駆動する転舵モータとを備える。車速判定部によって、検出された車速が規定値よりも小さいと判定された場合に、操舵部材の操舵角の増加に伴って転舵モータの通電を制限するとともに、操舵反力が急激に増大するように反力モータを制御する。
(もっと読む)
車両および車両制御プログラム
【課題】操舵支援を行いながら、走行経路に沿って滑らかに車両を走行させることができる車両および車両制御プログラムを提供すること。
【解決手段】推奨軌道に沿って車両1が走行するためのハンドル13の推奨ハンドル角φiを定め、実際のハンドル角φjと推奨ハンドル角φiとの差の絶対値が大きいほど、大きな補助力Fを、ハンドル13に対して、ハンドル角が推奨ハンドル角φiへ近づく方向に付与する。これにより、搭乗者は、ハンドル13を回転操作させなくても、ハンドル13に対して付与される補助力Fの方向および大きさから、推奨ハンドル角φiへと近づけるためにハンドル13を操作すべき方向やハンドルの操作量を容易に把握できる。
(もっと読む)
車両用操舵装置
【課題】旋回性に優れ且つ車両姿勢が安定した車両用操舵装置を提供すること。
【解決手段】車両の幅方向Xに延びる第1の被動ラック9Aと第2の被動ラック9Bに、共通の駆動ピニオン10が噛み合う。トレッド幅変更アクチュエータ11が駆動ピニオン10を駆動すると、第1および第1の被動ラック9A,9Bが互いに反対方向に移動する。第1および第2の転舵輪3A,3Bをそれぞれ転舵する第1および第2の転舵アクチュエータ4A,4Bが、それぞれ、第1の被動ラック9Aおよび第2の被動ラック9Bと同行移動する。転舵角センサにて検出された転舵角等に応じて、トレッド幅変更アクチュエータ11を駆動制御し、トレッド幅WTを変更する。
(もっと読む)
車両用操舵装置
【課題】省エネルギに優れ、且つ耐久性を向上させることができる車両用操舵装置を提供する。
【解決手段】据え切り操舵や荷役同時操舵等の非省エネ操舵が行われると、認知手段としての警告灯が点灯され(ステップS5)、非省エネ操舵であること運転者に認知させる。目標操舵反力Th*の操舵角速度比例成分のゲインk2を2倍に増加し(ステップS6)、目標操舵反力Th*を増加補正する。操舵反力の増加により、運転者に非省エネ操舵をしていることを確実に気付かせる。反力制御部が、運転者に非省エネ操舵をしていることを認知させる認知手段として機能する。
(もっと読む)
車両
【課題】後輪が操舵輪である車両において、旋回時の操縦性の低下を抑制する。
【解決手段】車両は、後輪の転舵により旋回させられるが、旋回方向は後輪の転舵方向とは逆向きになる。また、後輪の転舵に伴ってヨーレイトが生じるが、車両の重心に作用する横加速度は遅れる。横加速度が、過渡的に、逆向きに作用することがあるのである。それに対して、ヨーレイトγtgtに基づいてリーン角の目標値φrefが決定され、リーンアクチュエータが制御されるようにすれば、キャンバスラストが作用するため、その分、横加速度のヨーレイトに対する遅れを小さくすることができ、操縦性の低下を抑制することができる。
(もっと読む)
車両用操舵装置
【課題】回り止めを不要にでき、特に後輪を転舵する場合に好適に使用できる車両用操舵装置を提供する。
【解決手段】操舵部材と転舵機構A1の機械的な連結が断たれている。転舵軸6の一部に設けられた第1のねじ軸37および第2のねじ軸44が互いに逆ねである。第1のねじ軸37に第1のボール39を介して係合する第1のボールナット38を第1の電動モータ21によって回転駆動する。第2のねじ軸44に第2のボール46を介して係合する第2のボールナット45を第2の電動モータ22によって回転駆動する。第1のボールナット38の回転方向R1と第2のボールナット45の回転方向R3とは逆方向である。
(もっと読む)
車両用操舵装置
【課題】ノブを用いた操舵に対して適切な操舵反力を付与することができる車両用操舵装置を提供する。
【解決手段】操舵部材10と後輪(転舵輪)との間の機械的な連結が断たれた車両用操舵装置9である。操舵部材10のホイール52の芯金54に固定されたノブ支軸56が、軸受62を介してノブ51を回転可能に支持する。ノブ反力アクチュエータ12が、ノブ支軸56に固定されたステータ59と、ノブ51の内周51aと同伴回転するロータ60とを有する電動モータである。ノブ中心C3周りのノブ51の回転に対して、そのノブ回転角に応じた適切な操舵反力を付与するように反力アクチュエータ12を反力制御する。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に違和感の少ない支援を行うことでドライバビリティの向上を図る。
【解決手段】車両に作用する力を調整して車両の走行を制御可能に構成し、車両の走行状態に応じて車両に作用する力を調整する作用力調整手段と、ドライバが車両の走行を操作する操作部材の操作状態を検出する操作状態検出手段と、操作部材の操作状態に応じて作用力調整手段による調整度合を変更する調整度合変更手段とを設ける。
(もっと読む)
車両用操舵装置
【課題】省エネルギに寄与することができ、耐久性に優れた車両用操舵装置を提供する。
【解決手段】停車中(車速=0)あるいは微速走行のときに大きな操舵角θH(|θH|≧θH0)の操舵がなされた場合、目標転舵角θW*を、制限を受けていない通常マップ(破線で示す)上の通常値θWA*(または−θWA*)と零との間の所定の制限値θW0*(または−θW0*)に制限する。
【効果】次に停車時から発進するとき、または微速から走行速度を増加させるときに、実際の転舵角θWの絶対値が過度に大きい状態で走行するようなことがないので、走行抵抗を低減できる。
(もっと読む)
車両用操舵装置
【課題】走行効率が高く、転舵機構を小型、簡素化することが可能である車両用操舵装置を提供する。
【解決手段】検出された車速Vに基づいてフォークリフトの発進または走行中からの停車を検出する。発進するときまたは走行中から停車するときの転舵角θW が所定角度θ1(例えば70°)以上であることを条件として、目標転舵角θW * を漸減するように減少補正する。補正された目標転舵角θW * に基づいて転舵アクチュエータを転舵制御する。転舵角θW (実転舵角)を実質的に減少させて、走行抵抗を減じる。
(もっと読む)
車両用操舵装置
【課題】車両が路面の段差を通過するときの振動によって、運転者が握っている操舵部材が振られることを確実に抑制する車両用操舵装置を提供すること。
【解決手段】車両が反復走行経路R1上を走行しており、その反復走行経路R1上の段差D1の位置までの距離が所定距離L1以下であるときに、段差通過モードを設定する。段差通過モードでは、反力制御部が操舵部材に与える操舵反力を増加させる操舵反力増加制御を実行、転舵制御部が転舵角の変動を抑制する転舵角変動抑制制御を実行する。また、燃料供給量制御弁、ブレーキ圧制御弁に、車両を減速するための減速信号を出力する。
(もっと読む)
車両用操舵装置
【課題】一般に、積載荷重が大きいほど、また、積載物の位置が高いほど、旋回走行時のモーメント荷重が大きくなり、フォークリフトが不安定となる傾向にある。そこで、走行中に荷物が安定し、安定した走行を確保することができる車両用操舵装置を提供する。
【解決手段】積載荷重Wが大きいほど、また積載部高さHが高いほど、すなわち積載負荷W・Hが大きいほど、伝達比R(θw /θh )を小さくする。また、車速Vが大きいほど、伝達比を小さくする。転舵輪としての後輪の実質的な転舵速度を小さくし、走行時にフォークリフトが受けるモーメント荷重を抑制する。
(もっと読む)
レーンキープ又はレーン逸脱防止システム
【課題】車両挙動の安定を確保しながら、走行レーンからの逸脱を抑制してレーンキープすること。
【解決手段】ステアリングハンドル3による操舵を電動機4で補助し、前記ステアリングハンドル3の操作角に対する前輪1L、1Rの転舵角との舵角比を変化させる舵角比可変機構113を有する電動パワーステアリング装置110と、後輪2L、2Rのトー角を変更可能とするトー角変更装置120L、120Rと、走行レーンをキープする際に設定される目標とのずれを判定する操舵制御ECU130と、操舵制御ECU130の判定結果に基づいて、前記舵角比可変機構113の舵角比及び前記後輪2L、2Rのトー角をそれぞれ制御する。
(もっと読む)
車両挙動制御装置
【課題】 車輪が路面のバンプに乗り上げた場合等にも円滑な操舵制御を実現するための車両挙動制御装置を提供する。
【解決手段】 ECU20は、ステップS2で後輪目標舵角δrltと後輪実舵角δrlrとの差Δδrlが異常判定閾値δthを超えたか否かを判定する。左後輪3rlがバンプ等に乗り上げ、操舵抵抗の増大によって後輪操舵アクチュエータ8lが作動不良を起こしてステップS2の判定がYesになると、ECU20は、ステップS3でばね下Gセンサ18から入力したばね下加速度Gwlが加速度判定閾値Gwthを超えたか否かを判定し、この判定がYesであった場合、ステップS4で接地荷重低減指令を減衰力制御部22の減衰力補正部32に出力する。
(もっと読む)
パワーステアリング装置
【課題】操舵輪の操舵角度をハンドルにフィードバックすると共に、電源をオフにするとハンドルを操作できない。
【解決手段】ハンドル装置1は、ハンドル5の旋回角度に応じて回転する入力軸10と、フィードバック軸11と、フィードバック軸11に設けたウォームホイール21と、ウォームホイール21に連結するウォーム20と、ウォーム20を回転するフィードバック駆動部13と、入力軸10とフィードバック軸11とのずれ角度を規制する規制部15と、ずれ角度を検出するずれ角度センサ12とを備える。操舵駆動装置は、操舵輪を操舵方向に駆動する操舵輪駆動部と、操舵輪の操舵角度を検出する操舵角度センサとを備える。制御部は、ずれ角度センサ12からの信号に基づいて操舵輪駆動部を駆動して、操舵角度センサからの信号に基づいてフィードバック駆動部13を駆動して、入力軸10の回転に追従してフィードバック軸11を回転する。
(もっと読む)
1 - 20 / 46
[ Back to top ]