
Fターム[3D232EA09]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(操舵対象) (2,739) | 多軸操舵 (11)
Fターム[3D232EA09]に分類される特許
1 - 11 / 11
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
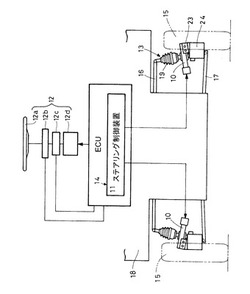
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
編成搬送台車設備

【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
自走台車のステアリング制御装置、自走台車、およびステアリング制御方法
【課題】自走台車の全のタイヤのステアリング軸の遅れ角をほぼ同一にし、タイヤに負担がかかることを防止し、タイヤの摩耗を減少させる。
【解決手段】全てタイヤ100のステア角を、タイヤ角度検出器31により常時検出し、比較器15により、個々のタイヤごとにステア指令角信号Vsとステア角FDBK信号とを比較し、ステア偏差角を求める。そして、最大偏差角演算回路18により、個々のタイヤのステア偏差角の内から最大偏差角を求める。ステア偏差角補正回路19では、最大偏差角の情報を基に、個々のタイヤ100のステア偏差角に補正を加え、この補正されたステア偏差角を基に、個々のタイヤ100の油圧機構に流れる油量を制御して、各タイヤのステア角を制御する。これにより追従が特に悪い軸(ステアリング遅れ角が大きい軸)に積極的に油を流すようにし、ステアリング遅れ角をほぼ同一にする。
(もっと読む)
多軸車両及びその操舵制御装置
【課題】 6輪車両や8輪車両のように3軸以上の車軸を有する多軸車両において、簡単な構成で小回り性能を向上させる。
【解決手段】 前方車軸22と後方車軸28の間に配置された1以上の中間車軸24、26に設けられた中間駆動輪34L、R、36L、Rを使って旋回を行なう。旋回を行う時、旋回外側の中間駆動輪34L、36Lの速度Voutを車速V0より高く制御し、かつ、旋回内側の中間駆動輪34R、36Rの速度Vinを車速V0より低く制御し、同時に、旋回内側の後方又は前方車輪36R又は32Rに制動をかける。旋回時、中間駆動輪34L、R、36L、R以外の駆動輪32L、R、38L、Rへの動力伝達を切って、これらの駆動輪を遊動状態にする。
(もっと読む)
多軸車両及びその操舵制御装置
【課題】 6輪車両や8輪車両のように3軸以上の車軸を有する多軸車両において、簡単な構成で小回り性能を向上させる。
【解決手段】 最前車軸22と最後車軸28の間に配置された1以上の中間車軸24、26に設けられた中間駆動輪34L、R、36L、Rを使って旋回を行う。旋回を行うとき、旋回外側の中間駆動輪34L、36Lの速度Voutを車速V0より高く制御し、且つ、旋回内側の中間駆動輪34R、36Rの速度Vinを車速V0より低く制御する。外側と内側の中間駆動輪の速度Vout、Vinは、操舵輪32L、R、34L、Rだけで旋回するときより小さい半径で旋回できるように、車速V0と操舵輪32L、R、34L、Rの操舵角ψとに応じて制御される。旋回時、中間駆動輪34L、R、36L、R以外の駆動輪32L、R、38L、Rへの動力伝達を切って、これらの駆動輪を遊動状態にする。
(もっと読む)
走行装置
【目的】 本発明の目的は路面の状況に左右されることなく安定した走行を行うことができる走行装置を提供する。
【構成】 車台100と、車台100の四隅に回転可能に設けられた車輪ユニット200と、車輪ユニット200の浮き上がり又は滑り(異常)を検出する検出手段300と、車輪ユニット200の向きを変化させる駆動部410と、走行指令値に基いて車輪ユニット200の駆動部220L、220Rを独立制御する制御部500とを備え、制御部500は、検出手段300を通じて車輪ユニット200に異常が発生したと判断すると、駆動部410の回転エンコーダ411を通じて検出した車輪ユニット200の向きと走行指令値に含まれる方向指令とが一致するか否かを判断し、一致しないと判断したときには、車輪ユニット200の向きと方向指令と一致するまで、駆動部410のステッピングモータ412を駆動させる。
(もっと読む)
三重の冗長性を有する車両用電動ステアリング装置
【課題】三重冗長を用いた、車両用電気的ステアリング。
【解決方法】操舵車輪1と、操縦ハンドル20と、操舵車輪のステアリング角度を変えるための並列して作用する3つの電気モータ31、32、33から成る電気的アクチュエータと、並列して動作する3つの制御装置61、62、63と、3つの電気的制御チャネルを互いに接続する相互接続バス8と、電気的制御チャネルの状態の相違を他の2つの電気的制御チャネルに対して検出し、相違がある場合には誤動作警報を出し且つ劣化モードで運転を維持する手段とを有し、各制御装置は位置センサに接続されたステアリング角度の電気的制御チャネルの一部を成し、各電気的チャネルの制御装置は3つの電気信号の中の1つを受け、電気モータを駆動してステアリング角度を与え、通常運転では各モータの出したトルクが合計される、車両用ステアリングシステム。
(もっと読む)
操舵制御装置
【課題】複数の車軸を有する搬送車両に対し、ハンドルの操舵角と操舵モードとに応じて、各車軸の車軸操舵角を算出することができる操舵制御装置を提供すること。
【解決手段】CPU3は、ハンドル操舵角検出装置9からハンドル8の操舵角を検出する(S3)。また、車両データメモリ5aに記憶されているホイールベース、トレッド、及び、車軸の軸数と、操舵モードメモリ5bに記憶されている操舵モードと、舵取り中心位置メモリ5cに記憶されている舵取り中心位置とのパラメータ値を読み出し、その読み出された各パラメータ値とハンドル8の操舵角に対応した各車軸2a〜2lの車軸操舵角を算出する(S4)。これにより、従来の操舵制御装置のように、ハンドルの操舵角に対応する各車軸の車軸操舵角の関係式を設計者が予め計算しておく必要がない。
(もっと読む)
動力舵取装置
【課題】前2軸車用の動力舵取装置を、エンジン駆動式ポンプ等の停止時にも操舵制御可能に構成し、しかも装置構造の簡素化、装置のコンパクト化、コスト低減を図る。
【解決手段】エンジンで駆動されるメインポンプ10とエンジン以外の駆動手段により駆動されるサブポンプ11と、舵取操作により各ポンプからの流体圧の流路切換えを行うコントロールバルブ15を備え、コントロールバルブ15で切換えられた流体圧による操舵補助力により操舵輪2,3を転舵制御するメインアクチュエータ50及びサブアクチュエータ51を備える。メインポンプ10、サブポンプ11のいずれか一方に切換え、コントロールバルブ15に給送するポンプ切換え手段30を備える。コントロールバルブ15からの流体圧をメインアクチュエータ50またはサブアクチュエータ51への流路を切換えることにより選択的に給送するアクチュエータ切換え手段40を備える。
(もっと読む)
車両用操舵装置
【課題】 旋回軌道を運転者の要求通りに自由に設定でき、車両の進行方向の予測がしやすい状態での小回りを実現できる車両用操舵装置を提供する。
【解決手段】 車両の走行輪を構成する4つの車輪4FR,4FL,4RR,4RLは、各転舵角をそれぞれ独立に制御できる転舵アクチュエータ5FR,5FL,5RR,5RLを有する構成であり、各輪4FR,4FL,4RR,4RLの回転軸が旋回中心を向くように転舵角を制御する操舵コントローラ6を備えた車両用操舵装置において、旋回中心の車両前後方向位置と車両横方向位置を指示することができるステアリングホイール1を設け、操舵コントローラ6は、旋回中心を車両前方に移動させた場合、それに伴い、旋回中心の車両横方向位置が車両に近づくようにする。
(もっと読む)
1 - 11 / 11
[ Back to top ]