
Fターム[3D233CA33]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 警報、表示装置 (226)
Fターム[3D233CA33]に分類される特許
1 - 20 / 226
車線逸脱防止装置
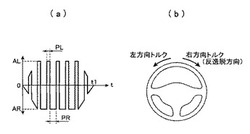
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
制御装置、リーチ式フォークリフトおよびプログラム

【課題】運転者に違和感を与えたり危険を及ぼしたりする可能性のある状態であることを、事前に運転者へ通知できるようにする。
【解決手段】操舵モードをロックモードへと切り替えるための操作が運転者により行われた際(s120「YES」)、操舵輪53の操舵角がロック角以上になっていると、切替条件が満たされていないとしてロックモードへの切替を保留するとともに(s130「NO」)、切替条件が満たされていないことを通知することができる(s140)。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置において、モータに電流を流す通電路に設けた開閉リレーが溶着等により閉故障した場合、安全に操舵アシストを継続して、運転者の感じる不便を軽減する。
【解決手段】リレー故障検出部61により開閉リレー48の閉故障が検出されると、制御態様変更部80は、目標電流演算部71、電流指令値演算部72、PWM制御部73に対して、回路故障抑制操舵アシスト制御の実行を指令する。回路故障抑制操舵アシスト制御時においては、モータ駆動回路40の故障が抑制されるように、モータ20の上限電流Imax、あるいは、上限電圧Vmax、あるいは、上限電力Pmax、あるいは、目標電流I*、あるいは、電圧指令値V*が低減される。
(もっと読む)
電動パワーステアリング装置および禁止方法
【課題】モータの回転角度を正確に検出することができない状態でモータにより操舵補助力が与えられることを抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転角度に応じた信号を出力するレゾルバと、レゾルバからの出力値に基づいて電動モータの回転角度を算出するモータ角度算出部と、モータ角度算出部が算出した算出回転角度に基づいて電動モータへの目標電流を設定し、電動モータの駆動を制御する制御装置と、を備え、制御装置は、起動時に、電動モータの実際の回転角度と、レゾルバからの出力値が示す回転角度とが所定の位相差とならない異常が発生しているか否かを診断し、異常が発生している場合には電動モータの駆動を禁止する。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
運転者の疲労推定装置
【課題】より精度良く運転者の疲労度を推定することを目的とする。
【解決手段】操作子であるステアリングホイール7に入力する外乱トルクに対する上記ステアリングホイール7を操作する運転者のインピーダンスを推定し、推定したインピーダンスと、予め設定若しくは計測した事前のインピーダンスとの差分に基づき、運転者の疲労度を推定する。
(もっと読む)
移動体の操舵反力調整装置
【課題】運転者の疲労状態により適した操舵反力に近づくように当該操舵反力を調整可能とすることを目的とする。
【解決手段】操舵反力用コントローラ6は、筋力検出部11と、疲労推定部12と、反力調整部13とを備える。筋力検出部11は、筋骨格モデルとアドミタンス計測手法をもちいて、運転者の肩部から手までに位置する腕の筋肉のうちから選択した複数の筋の筋力を推定する。そして、推定した複数の筋の疲労度と操作子の操舵状態とに基づき、操作子に付加する操舵反力を調整する。
(もっと読む)
電動パワーステアリング装置
【課題】 レゾルバの検出コイルの一方が断線した場合でも、操舵トルクを検出できなくなる状況を低減する。
【解決手段】 かさ上げ電流設定部310は、かさ上げ電流マップを参照して、かさ上げ基本電流Iqupoを設定する。このかさ上げ基本電流Iqupoは、第2レゾルバで回転角を演算できない回転角演算不能領域に対応したモータ電気角θmeの範囲において設定値Iqoに設定され、それ以外の範囲においてゼロに設定される。かさ上げ電流設定部310は、かさ上げ基本電流Iqupoに、モータ回転速度|ωm|に応じて設定されるゲインKを乗じてかさ上げ目標電流Iqup*を演算し、q軸指令電流Iq*にかさ上げ目標電流Iqup*を加算する。
(もっと読む)
車両用操舵装置
【課題】、遊星ギヤの自転運動に基づいて、伝達比が固定されているか否かを判定できる車両用操舵装置を提供する。
【解決手段】伝達比可変機構13は、入力軸18に連結される入力サンギヤ54と、出力軸19に連結される出力サンギヤ55と、入力サンギヤ54と出力サンギヤ55の双方に噛み合う遊星ギヤ56と、遊星ギヤ56をこの遊星ギヤ56の中心軸線L2回りに自転可能に支持するキャリア57とを含んでいる。また、車両用操舵装置1には、遊星ギヤ56の自転運動を検出する遊星ギヤセンサ35と、検出された遊星ギヤ56の自転運動に基づいて伝達比θ2/θ1が固定されているか否かを判定する操舵制御部38と、が備えられている。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】いずれかのインバータまたは巻線組が故障したとき、運転者に確実に故障の発生を気付かせる電動機駆動装置を提供する。
【解決手段】2つのインバータおよび2組の巻線組を備える2系統の電動機駆動装置においていずれか1系統のインバータまたは巻線組の故障を検出したとき(S20YES)、故障系統の電源リレーを遮断し(S50)、正常系統の電流供給制限値を徐々にゼロまで低減する(S60)。その後、操舵トルクが所定の閾値を超えたとき(S70YES)、正常系統の電流供給制限値を所定量増加する(S80)。正常系統の電流供給制限値が最大電流制限値に達したとき、電流供給制限値の増加を中止する(S90)。電流供給制限値を一旦ゼロまで低減させた後、徐々に操舵アシストトルクが発生する状況を作り出すことで、運転者に操舵トルクの変化を感じさせ、確実に故障発生を気付かせることができる。
(もっと読む)
車両用操舵装置
【課題】転舵輪の最大舵角近傍に達したステアリング操作を抑制することが可能な車両用操舵装置を提供すること。
【解決手段】マイコン41は、転舵角が転舵輪の最大舵角近傍の所定の舵角を超えた場合には、車速が速いほど、又は転舵角が大きいほど、伝達比可変装置8のモータ13を制御するための位置比例ゲインを高くするとともに、転舵角が転舵輪の最大舵角近傍の所定の舵角を超えた場合には、転舵角が大きいほど、伝達比可変装置8のモータ13を制御するための微分ゲインを高くする。
(もっと読む)
電動パワーステアリング装置
【課題】寄生ダイオードを有する電界効果トランジスタを電源開閉器として適用した場合に、電界効果トランジスタの異常を検出することができる電動パワーステアリング装置を提供する。
【解決手段】車両のステアリング機構に対する操舵補助力を発生する電動モータを駆動するモータ駆動回路13は、前記電動モータを駆動するブリッジ回路22と、該ブリッジ回路に直流電力を供給する直流電源からの直流電力が入力される電源端子tp,tnと、該電源端子と前記ブリッジ回路との間を接続する一対の電源ラインの何れか一方に、内部の寄生ダイオードが前記直流電源に対して順方向となるように介挿された電界効果トランジスタFET1と、該電界効果トランジスタをオン状態及びオフ状態に駆動したときの当該電界効果トランジスタの入力側及び出力側の両端の差動電圧を検出して当該電界効果トランジスタの異常を検出する異常検出手段とを備えている。
(もっと読む)
トルクセンサの故障検出方法、及びパワーステアリング装置
【課題】検出信号が正常値より上昇又は低下する故障がトルクセンサに発生した場合でも、正常な検出信号を特定できるトルクセンサの故障検出方法、及びその故障検出方法で正常な検出信号を特定できるパワーステアリング装置を提供することを課題とする。
【解決手段】操舵トルクに応じて変化する第1検出信号の電圧V1及び第2検出信号の電圧V2の合計電圧Vtが所定の電圧となるトルクセンサの故障検出方法であって、Atan(V2/V1)で求められる特性角度θを算出するステップS411と、特性角度θの基準角度θSを算出するステップS416と、特性角度θから基準角度θSを減算して角度誤差Δθを算出するステップS417を有し、角度誤差θS及び合計電圧Vtに基づいて、合計電圧Vtが所定の電圧から外れた場合の前記第1検出信号と前記第2検出信号のうちの正常な信号を特定することを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】平滑用コンデンサと直列に接続した電界効果トランジスタの異常を正確に検出することができる電動パワーステアリング装置を提供する
【解決手段】車両のステアリング機構に対する操舵補助力を発生する電動モータを駆動するモータ駆動回路13は、前記電動モータを駆動するブリッジ回路22と、該ブリッジ回路に直流電力を供給する直流電源からの直流電力が入力される電源端子tp,tnと、該電源端子と前記ブリッジ回路との間を接続する正極ライン及び負極ライン間に介挿された平滑用コンデンサC1PC2と、該平滑用コンデンサと前記正極ラインとの間に、内部の寄生ダイオードが前記平滑用コンデンサへの電荷の蓄積を妨げる方向となるように接続された電界効果トランジスタFET2と、前記平滑用コンデンサ及び前記電界効果トランジスタ間の電圧を検出して当該電界効果トランジスタの異常を検出する異常検出手段12とを備えている。
(もっと読む)
操舵装置
【課題】複数の異なる動作で操作することのできるステアリングハンドルを用いて、操作性を向上させることのできる操舵装置を提供する。
【解決手段】操舵装置1は、複数の異なる動作で操作することのできるステアリングハンドル12を有する入力部3を備えているため、一つのステアリングハンドル12で第一入力、及び第一入力を除く動作における第二入力を出力することができる。一方、第一操舵部4は、第一入力に基づいて操舵を行うと共に、第二操舵部6は、第二入力に基づいて操舵を行うことができる。従って、運転者は、一つのステアリングハンドル12の操作によって、第一操舵部4及び第二操舵部6を同時に操舵することができる。すなわち、運転者はステアリングハンドルを保持した状態で、後側車輪T2も操舵することができる。
(もっと読む)
操舵装置
【課題】より簡単な構成により故障を判定することが可能な操舵装置を提供する。
【解決手段】操舵装置10のタイヤ角制御部29は、ステアリングホイール12を回転させる方向である主操作方向Mへの操作及びステアリングホイール12を傾斜させる方向又は押し引きする方向である副操作方向Sb1,Sb2への操作により自車両の操舵を行なう。フェイル判定部28は、主操作方向Mへの操作による入力値の変化と、副操作方向Sb1,Sb2への操作による入力値及びその変化とに基づいて操舵装置10が故障していると判定する。これにより主操作方向Mへの操作に係る操作系及び副操作方向Sb1,Sb2への操作に係る操作系それぞれに故障を判定する機能を備えなくとも、ステアリングホイール12を回転させる方向と傾斜させる方向等の2以上の操作方向への操作の入力値に基づいて故障の判定を行うことが可能となる。
(もっと読む)
操舵装置
【課題】補助操作によるステアリングの操作入力の0点学習を正確に行うことができる操舵装置を提供する。
【解決手段】操舵装置1は、通常の回転操作(主操作)と車両前後方向に押し引きする操作(補助操作)とが実施可能なステアリング2と、このステアリング2を押し引き方向に駆動する押し引き反力アクチュエータ8と、操舵ECU9と、シフトレバーの位置を検出するシフトセンサと、車両の車速を検出する車速センサと、エンジンを始動するためのイグニッションスイッチとを備えている。操舵ECU9は、シフトレバーの位置がPレンジにあるとき、イグニッションスイッチがOFFであるとき、車両の車速がゼロであるときに、ステアリング2の押し引き位置を基準位置(中立位置)に戻すように押し引き反力アクチュエータ8を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】電力変換器又は巻線の故障時に、運転者の操舵力を安全かつ継続して補助する電動パワーステアリング装置を提供する。
【解決手段】複数のインバータ13、14は、バッテリー18から供給される電流を電動機駆動制御装置6が設定した電流指令値に基づく電流Ia、Ibに変換し、その電流Ia、Ibをそれぞれに対応する三相巻線11、12に供給する。故障検出装置15は、インバータ13、14または三相巻線11、12の故障を検出する。この故障検出装置15が一方のインバータ13または三相巻線11の故障検出をした場合、電動機駆動制御装置6は、電流指令値を正常時よりも低減する。これにより、他方の正常なインバータ14から対応する三相巻線12に供給される電流Ibが低下するので、運転者の操舵を補助する電動機の駆動力が低下する。このため、運転者の操舵力に変化を与え、運転者に故障の発生を気付かせることができる。
(もっと読む)
モータ装置および電動パワーステアリング装置
【課題】3相交流式電動モータの1相に異常が発生したとき、正常な2相のみに通電するモータ装置において、簡単な構造で、電動モータのトルクリップルの低減を図り、電動モータにより駆動される駆動対象の作動安定性の向上を図る。
【解決手段】モータ装置20は、電動モータ21の3相の各巻線22u,22v,22wに通電する駆動回路31を制御する駆動制御装置30を備える。異常相検出手段45により異常相が検出されたとき、駆動制御装置30の位相変更手段35は、巻線22u,22v,22wのうちで、異常相の巻線への通電を停止すると共に異常相以外の正常な2相の巻線に通電するように駆動回路31を制御し、かつ、2相作動時の電動モータ21のトルクリップルを、2相の通電位相差を3相が正常であるときの正常時位相差としたときよりも低減すべく、2相の通電位相差を正常時位相差とは異なる異常時位相差に変更する。
(もっと読む)
1 - 20 / 226
[ Back to top ]