
Fターム[3D244AA41]の内容
Fターム[3D244AA41]の下位に属するFターム
変速ショック防止 (8)
Fターム[3D244AA41]に分類される特許
1 - 20 / 30
車両の走行制御装置
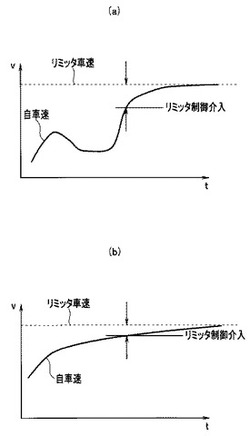
【課題】車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制する。
【解決手段】自車両の車速がリミッタ車速に向かって上昇していくとき、加速度の大きい場合は早めにリミッタ制御を開始させることで車速超過を抑え、緩やかな加速の場合はなるべくリミッタ制御が介入しないようにしてドライバの意図に沿った運転を可能とする、また、ドライバのアクセル操作による要求トルクからリミッタ制御の要求トルクへの大きなトルク変動が予想される場合には、トルクの繋がりを滑らかにして目標トルクとなるまでに要する時間を考慮し、リミッタ制御の介入タイミングを調整する。そして、最終的に、少なくとも加速度による要因とトルク変動の要因とを総合的に判断してリミッタ作動領域を設定することにより、車速制限制御の開始タイミングを適正化してドライバに対する違和感や車速超過を抑制することができる。
(もっと読む)
車両の走行制御装置

【課題】クルーズコントロール制御と惰性走行制御を備える車両の走行制御装置において、クルーズコントロール制御中に目標車速よりも走行車速が速い場合、惰性走行の実施により得られる減速度が小さいと走行車速と目標車速がずれた状態が長く続き運転者に違和感を与える。
【解決手段】クルーズコントロール制御中に目標車速に比べて走行車速が速く、惰性走行を実施しても所定値よりも大きな減速度が得られる場合は惰性走行を実施する。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動走行において、運転者に与える違和感を抑制可能とする。
【解決手段】運転者による起動操作により作動して、運転者が設定した走行状態に自動調整するための目標駆動力を算出し、エンジンへの燃料供給を制御する手段を備えたハイブリッド車両の走行制御装置であり、目標駆動力に応じた目標駆動トルクが、予め設定した負値のクルーズコーストF/C判定値未満となると、エンジンへの燃料供給を停止するF/C処理を、起動操作を検出しており、さらに、エンジンが駆動輪に駆動力を伝達し且つハイブリッド車両が減速している状態において行う。
(もっと読む)
車両用走行制御装置
【課題】クルーズ走行等の自動定速走行において、運転者に与える違和感を抑制可能とするとともに、ドライバビリティの向上が可能となる。
【解決手段】運転者が設定した走行状態に自動調整するための目標駆動力を算出する処理を行なっている状態で、目標駆動力に応じた目標駆動トルクが運転者による目標駆動力の減少要求で路面抵抗トルク未満に減少すると、減少した目標駆動トルクが増加へ反転する反転タイミングから増加した目標駆動トルクが路面抵抗トルクとなるまでの目標駆動トルクの増加度合いを変化させ、反転タイミングが運転者による減少要求の停止操作と連動している場合には、反転タイミングが運転者による減少要求の停止操作と連動していない場合よりも目標駆動トルクの増加度合いを大きくする処理を行う。
(もっと読む)
走行制御装置
【課題】車車間通信により目標車間距離変化パターンのデータを受信した車両における乗員の乗り心地の悪化を抑制することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず目標車間距離を時間経過に従って短くするように変化させる目標車間距離変化パターンL(t)を決定し、この目標車間距離変化パターンL(t)の車間距離変化時間tsにおいて目標車間距離の時間変化量の最大値を求める。そして、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも小さいときは、目標車間距離変化パターンL(t)のデータを後方車両に送信し、目標車間距離の時間変化量の最大値と隊列通信周期Tとの乗算値が閾値Thよりも大きいときは、現在の目標車間距離変化パターンL(t)の車間距離変化時間tsに定数αを加算し、これを新たな車間距離変化時間tsとした目標車間距離変化パターンL(t)を作成する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】EVモード走行時のモータの実モータトルクから、HEVモード走行時の目標エンジントルクを求めることで、目標エンジントルクとエンジン実トルクとのずれを抑え、EVモードからHEVモードへの切換時のトルク変動を抑えることを安価に達成できるハイブリッド車両の制御装置を提供すること。
【解決手段】統合コントローラ10は、オートクルーズ制御時での、EVモード走行時に、車速が目標車速に収束した時点のEV時モータ実トルクを求め、その後の、HEVモード走行時のHEV時モータ実トルクから、エンジン実トルクを求め、エンジン実トルクと目標エンジントルクとの相違に基づいて、HEV走行時の目標エンジントルクを補正する目標エンジントルク算出処理を行なうハイブリッド車両の制御装置とした。
(もっと読む)
車両用走行制御装置
【課題】追従走行時のユーザ利便性を向上させた車両用走行制御装置を提供すること。
【解決手段】車両に搭載され、自車両の車速を目標車速に制御する車両用走行制御装置が、先行車に対する追従走行中、運転者によりブレーキペダルが踏み込まれ、次いで、運手者によりブレーキペダルが離されたとき、上記目標車速をブレーキOFF時の自車両車速に変更する目標車速変更手段と、ブレーキON時には先行車が存在したが、ブレーキOFF時には先行車が存在しなかったことが検出され、且つ、ブレーキON時の自車両走行車線と、ブレーキOFF時の自車両走行車線とが等しいことが検出されたとき、上記目標車速変更手段による上記目標車速の変更を禁止する目標車速変更禁止手段と、を備える。
(もっと読む)
交差点無停止走行制御方法
【課題】前方走行車両への遭遇等による走行環境の変動に柔軟に対応して安全・安定に交差点を青信号・無停止で通過できる交差点無停止走行制御方法の提供。
【解決手段】車両内において交差点を青信号無停止で通過するための3つの走行条件、即ち、1)通過すべき交差点の青信号期間、2)車両の前記青期間内への最短時間での交差点到着時刻、3)上記2)で算出・設定した交差点到着時刻を満足する推奨走行速度、の算出・設定を地点P通過時および地点P通過後一定時間T経過毎に行う。前記走行条件中の推奨走行速度は更新される都度車両に搭載された速度制御装置の設定速度として自動的に入力・設定する。また、車車間通信等で獲得される前方走行車走行速度は、前方走行車追従走行の可否判定のための情報および可の場合の速度制御装置への設定速度情報とする。
(もっと読む)
車両およびその制御方法
【課題】走行用の駆動力を滑らかに変化させる範囲をより適正なものとすると共に巡航走行の際に運転者に違和感を与えるのを抑制する。
【解決手段】車重Mが大きいほど大きくなる傾向で車速Vが大きいほど大きくなる傾向の巡航走行用アクセル開度Accjに基づいて巡航走行用範囲Rを設定し(S120)、アクセル開度Accが巡航走行用範囲R内のときには要求トルクTr*に対して緩変化処理を施して実行トルクT*を設定すると共に(S130,S150)、バッテリの入出力制限Win,Woutの範囲内で実行トルクT*が駆動軸に出力されるようエンジンと二つのモータとを制御する(S160〜S240)。これにより、巡航走行用範囲Rをより適正に設定することができると共にアクセル開度Accが巡航走行用範囲Rのときに運転者に違和感を与えるのを抑制することができる。
(もっと読む)
車両制御装置
【課題】より快適な運転フィーリングを実現することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、自車両の車速を検出する車速検出手段3aと、自車両と先行車両との車間距離及び先行車両の有無を検出する車間距離検出手段3bと、車速を設定車速に制御する及び車間距離を車速で除して算出された車間時間を設定車間時間に制御する車両制御手段3dと、前方情報を取得する前方情報取得手段5aと、前方情報に基づいて自車両を車線内に維持するように操舵装置の転舵力を制御する操舵制御手段5bと、運転者の先行車両に対する追従意思を推定する推定手段3cを備え、車両制御手段3dによる制御と操舵制御手段5bによる制御が同時に行われており、かつ、推定手段3cが追従意思を推定しない場合に、車両制御手段3dが車速を転舵力が制限値となる制限車速以下Vrとする制限車速制御を行うことを特徴とする。
(もっと読む)
車両走行制御装置
【課題】 車両が旋回中に所定の速度で走行する走行制御が開始された場合でも、ドライバ対して与える違和感を小さくすることができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、ヨーレートセンサ5から送信されるヨーレート信号および車速センサ7から送信される車速信号に基づいて自車両の旋回状態を検出する。ここで、自車両が旋回状態にあるときにクルーズ設定スイッチ4がONとされた場合には、ACCを開始するとともに、スロットル開度を0に設定して、現状のスロットル開度を維持するようにする。
(もっと読む)
追従走行制御システム
【課題】 先導車両のジャークに起因した追従車両の乗り心地悪化を抑制することができる追従走行制御システムを提供する。
【解決手段】 追従走行制御システム1は、先導車両に搭載された送受信器5及びECU6を備えている。ECU6は、スロットル開度を設定するスロットル開度設定部8と、スロットル開度とエンジン回転数とに基づいて要求エンジントルクを設定する要求E/Gトルク設定部9と、送受信器5で受信された後続車情報を入力し、後続車情報に含まれる乗車状態に関する情報に基づいてエンジントルク変化率制限値を設定するE/Gトルク変化率設定部10と、エンジントルク変化率制限値を用いて要求エンジントルクにリミッタをかけることで最終要求エンジントルクを求め、この最終要求エンジントルクに応じてスロットルアクチュエータ15を制御する要求E/Gトルク補正部11とを有している。
(もっと読む)
車両走行制御装置
【課題】車両の発進時の過度な急加速を防止することができる車両走行制御装置を提供することである。
【解決手段】車両走行制御装置1は、アクセルペダル7とは別に運転者の手による操作で車両を加速させるための補助加速操作レバー8と、ECU2と、アクセルペダル7の踏み込み量を検出するアクセル開度センサ3と、補助加速操作レバー8の操作量を検出するレバー操作量センサ4と、車両の車速を検出する車速センサ5とを備えている。ECU2は、アクセルペダル7の踏み込み量、補助加速操作レバー8の操作量、車速に基づいてスロットルバルブ6の開度(スロットル開度)を設定する。このとき、アクセルペダル7及び補助加速操作レバー8によるスロットル開度の設定に対する寄与度を変更する。
(もっと読む)
車両用制御装置及び車両用制御システム
【課題】エンジン10のクランク軸12の回転力を自動変速装置14を介して駆動輪16へと伝達させる車両について、変速比の切り替え制御に伴い、その前後方向の実際の加速度を目標加速度によりフィードバック制御する制御性が低下すること。
【解決手段】実加速度と目標加速度とに基づき、比例積分微分演算によってフィードバック操作量が算出され、これに基づき、エンジン10及び自動変速装置14からなるパワートレインとブレーキアクチュエータ20とが操作される。自動変速装置14による変速比の切り替え制御中においては、比例項及び微分項を初期化するとともに、積分項を切り替え直前の値に保持する。
(もっと読む)
車両走行制御装置
【課題】先行車両との安全性を確保すると共に、運転者に不快感を与えることなく発進することのできる車両走行制御装置を提供する。
【解決手段】停止中の車両が置かれている状況に合わせて、発進時の加速度の立ち上がり勾配を変化させる。すなわち、先行車両が緩やかに加速しながら発進する可能性の高い状況にあるときは、立ち上がり勾配を通常値に保つことによって先行車両と追突することを防止し、先行車両が急加速で発進する可能性の高い状況にあるときは、立ち上がり勾配を大きい値に設定することによって、速やかに加速し、先行車両から引き離されることを防止する。
(もっと読む)
車両およびその制御方法
【課題】定速走行指示がなされたときにより適正な制御を行なう。
【解決手段】モータからの動力を用いて走行する電気自動車において、定速走行が指示されたときに(ステップS110)、要求トルクTd*が負のトルクであると共に車両の状態がクリープトルク出力領域にあるときには(ステップS160,S200)、モータから出力するクリープトルクを徐減させて値0にすると共に(ステップS230〜S290)駆動輪に要求トルクTd*に基づく制動力を作用させる(ステップS300,S310)。こうした制御によりモータから駆動方向のトルク(クリープトルク)を出力する一方で駆動輪に制動力を作用させるものに比して、より適正な制御を行なうことができ、エネルギ効率の向上を図ることができる。
(もっと読む)
車両の走行制御装置
【課題】 実車速を目標車速に一致させるよう制御する車両の自動走行制御装置に於いて、他の制御の介入作動の後、本制御が反映される状態となったときに駆動装置に於いて発生する駆動トルクの急激な上昇又は下降を回避すること。
【解決手段】 本発明の走行制御装置は、目標車速と実車速との偏差の積算値に基づいて要求駆動トルクを決定する手段と、要求駆動トルクに基づいて駆動装置の作動を制御する手段と、他の制御の介入によって要求駆動トルクが駆動装置に於いて実現できない状態にあるか否かを判定する判定手段を含み、要求駆動トルクが駆動装置に於いて実現できない状態にあると判定したときには、要求駆動力又は要求駆動トルクの増減が制限される。
(もっと読む)
自動車の制御装置及び制御方法
【課題】
車両の安全性を確保するための制御量と運転者が意図する状態とするための制御量との切り換えが、パワートレインからのショックを低減しつつ実行可能として、安全性と運転性の両立を図る。
【解決手段】
駆動軸トルク,駆動力,加減速度の少なくともいずれかの制御の目標値として変更前の第一の目標値と、運転者が意図する走行モードあるいは前方走行環境に応じて演算された第二の目標値との間に、予め定められた値を越える偏差が生じた場合、駆動軸トルク,駆動力,加減速度の少なくともいずれかの変動を抑制するように制御する。
(もっと読む)
走行制御装置
【課題】 異なる制御を行う場合でも、乗員の乗り心地の低下を招かず、停止直前の際にドライバが運転する感覚に近い制御を行う走行制御装置を提供する。
【解決手段】 走行制御装置1は、先行車両に追従走行する追従走行制御と、先行車両が停止した際に先行車両との距離が一定になるように自車を停止させる停止制御を行う。車間距離ECU11は、追従走行制御から停止制御に移行する際、停止制御により算出される加減速度と、この加減速度が算出される直前における自車の加減速度とが線形的になるように制御する。
(もっと読む)
車両用走行制御装置
【課題】走行状態に応じた適切な定速走行を実現する車両用走行制御装置を提供すること。
【解決手段】ハイブリッド車を定速走行させる車両用走行制御装置に、自車両と自車両前方を走行中の先行車との車間距離を検出する検出手段と、この検出手段により検出された上記車間距離に基づいて駆動力を制御することにより所定の定速走行を実現する制御手段とを備える。制御手段は、自車両の車速に応じて最小車間距離を設定し、上記車間距離が最小車間距離よりも小さくなったときに駆動力の発生を停止させて自車両を惰性走行させると共に、自車両の車速に応じて最大車間距離を設定し、惰性走行中、上記車間距離が最大車間距離よりも大きくなったときに駆動力の発生を開始する。
(もっと読む)
1 - 20 / 30
[ Back to top ]