
Fターム[3D301EC41]の内容
Fターム[3D301EC41]に分類される特許
1 - 20 / 160
サスペンション装置
【課題】 サスペンション装置の大型化を抑制しつつ電磁アクチュエータのフェイルセーフ機能を設ける。
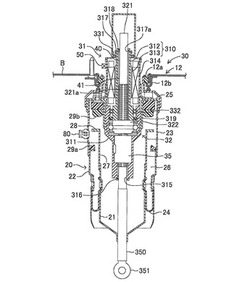
【解決手段】 電磁アクチュエータ30は、電動モータ31とボールネジ機構32とを備える。電動モータ31は、円筒状のロータ310を備え、このロータ310はボールネジナット322に連結される。ボールネジナット322と螺合するボールネジ軸321は、ロータ310の中空部に隙間をあけて挿通される。ロータ310とボールネジ軸321との隙間には粘性油40が封入される。バネ上部材とバネ下部材とが上下方向に相対運動すると、ロータ310とボールネジ軸321との間に封入された粘性油に粘性せん断力が発生し、この粘性せん断力が、バネ上部材とバネ下部材との相対運動を減衰させる。
(もっと読む)
後輪トー角制御装置

【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
車両用電動ダンパ装置
【課題】車輪の上下運動を最適に減衰させて車両の乗り心地を向上させることができるとともに、早々に熱に変換されないで、しかも、常時回生させることができる車両用電動ダンパ装置とする。
【解決手段】車両用電動ダンパ装置は、車体に対する車輪の相対的な上下運動を回転運動に変換して電動モータ35L,35Rを回転させることにより上下運動を減衰させるようにし、また、車輪の上下運動を減衰させるための減衰力を電動モータが発生する。車両用電動ダンパ装置は、車輪が上下方向に変位する変位速度を算出する変位速度検出部と、変位速度に基づいて電動モータの目標駆動電流を設定する駆動電流設定部と、目標駆動電流に基づいて電動モータを駆動制御するモータ駆動部106L,106Rとを有している。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43と、補正手段43における演算で使用する緩衝器2の伸縮速度を当該伸縮速度の変化に応じて補正する速度補正手段44を備えた。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下関連制御量の位相遅れを低減する。
【解決手段】 周期設定部170は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ上減衰制御力演算部110の演算周期Tbを長くし、バネ下減衰制御力演算部120、慣性力演算部130、制振制御力演算部140、目標モータ力演算部150の演算周期Twを短くする。また、通信部160の通信周期Tsも短くする。これにより、マイクロコンピュータの高スペック化を図らなくても、慣性補償制御を適切に行うことができる。
(もっと読む)
サスペンション装置
【課題】 悪路走行時にバネ下上下加速度信号のローパスフィルタ処理による位相遅れを低減する。
【解決手段】 フィルタ特性変更部160は、バネ下加速度センサ62の出力する検出信号G1の変化率の大きさ|G1’|が基準値Th1より大きく、かつ、バネ下上下加速度の大きさ|G1|が基準値Th2よりも大きいときに、悪路走行時であると判定して、バネ下ローパスフィルタ処理部121のカットオフ周波数fcを通常よりも高いfchighに設定する。これにより、バネ下上下加速度x1”の位相遅れが抑制される。従って、慣性補償制御を適切に行うことができる。
(もっと読む)
ショックアブソーバ装置
【課題】電磁式ショックアブソーバの減速機の慣性の影響で乗り心地が悪化することを抑制する。
【解決手段】フィルタ処理部51は、誘起電圧の周波数とゲインとの関係を設定した周波数ゲイン特性を記憶しており、周波数ゲイン特性を使って、電圧センサにより検出した実誘起電圧Voutをフィルタ処理する。電圧比較部53は、フィルタ処理部51から出力されたフィルタ誘起電圧Vxと三角波発生部52から出力された三角波電圧Vrとを比較し、フィルタ誘起電圧Vxが三角波電圧Vrより大きくなる期間においてハイレベル信号を出力する。PWM制御信号出力部54は、ハイレベル信号を入力している期間において、スイッチング素子SW1,SW2をオン状態とする。
(もっと読む)
車両用発電サスペンションダンパ装置
【課題】車両のロール共振周波数付近でもオイルダンパと同程度以上のダンパ性能を発揮するとともに走行路面の凹凸に対しては必要以上にダンパが硬くならないダンパ性能が制御される車両用発電サスペンションダンパ装置を得る。
【解決手段】車両用発電サスペンションダンパ装置は、路面の凸凹に伴う車輪の振動を車体に伝えないように振動を緩衝する車両用発電サスペンションダンパ装置において、Duty比100%で動作されるとき車両のロール共振周波数付近でオイルダンパと同程度以上にサスペンション軸を伝搬する振動を緩衝する発電機と、上記発電機をDuty比が0%から100%の間で動作させる発電回生制御装置と、を備える。
(もっと読む)
アクチュエータの作動制御装置
【課題】 プレビュー制御の制御性能の悪化が抑えられるアクチュエータの作動制御装置を提供すること。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
(もっと読む)
減衰力制御装置
【課題】 電気モータの過大な発熱が抑えられるように、電気式ショックアブソーバの減衰力を制御すること。
【解決手段】 H式と、R式と、P式に、電気モータ40の発熱量の総和を表すQ式を加え、これらの4個の式に基づいて、電気モータ40の発熱量の総和が最小となるように各輪要求減衰力を演算する。このように演算された各輪要求減衰力に基づいて各電気式ショックアブソーバ30により発生される減衰力を制御する。これにより、電気モータ40の発熱量の総和が最小となり、電気モータ40の過大な発熱が抑えられる。
(もっと読む)
サスペンション装置
【課題】 凹凸路面走行時におけるバネ上変位伝達比の低減および、勾配変化路面走行時におけるストッパ当たりの防止、ショック感の低減を両立したサスペンション装置を提供すること。
【解決手段】 凹凸路面を走行する場合に、修正アクティブ制御力fbfr*,fbfl*によってバネ上部材の振動が抑えられ、バネ上変位伝達比が低減される。また、勾配変化路面を走行する場合、修正ストローク減衰制御力fsfr*,fsfl*により、早期に路面からの入力がバネ上部材に伝達され、路面入力のピーク値が小さくなる。その結果、ショック感が低減される。また、車両が勾配変化路面を走行している場合に、ストローク変位量が大きくなると、ストローク減衰制御が支配的となり、電磁式ショックアブソーバ装置の伸縮動作に対する抵抗力が増加する。抵抗力の増加によってストッパ当たりの発生が効果的に防止される。
(もっと読む)
車両の電磁サスペンション装置
【課題】大型化することなく、消費電力を大きくすることなく、確実に良好な乗り心地を確保し得ると共に、操舵時の安定性を確保し得る電磁サスペンション装置を提供する。
【解決手段】スタビライザ装置SBを備えると共に、検出手段SNの検出結果に応じて駆動制御手段DRによってリニアモータLMを駆動制御し、ばね下部材LSとばね上部材USとの間の相対変位を調整する電磁制御装置ECを備える。スタビライザ装置SBは、スタビライザバー1と左右の車輪又は左右のどちらかの車輪との間に介装するコネクティングロッド2を有し、ばね下部材及びばね上部材間のストロークが小さい領域では捩り剛性が小さく、ストロークが大きい領域では捩り剛性が大きくなる特性に設定する。
(もっと読む)
サスペンション装置
【課題】 上下加速度センサの傾きや他軸感度によって生じる不必要な乗り心地制御を抑えることができるサスペンション装置を提供すること。
【解決手段】 乗り心地制御モータ力FMziは、重み付きロール制振要求力fφWφ、重み付きピッチ制振要求力fθWθおよび重み付きヒーブ制振要求力fHWHに基づいて算出される。ロール制振要求力fφに係るロール重みWφ、およびピッチ制振要求力fθに係るピッチ重みWθは、バネ上部材に作用するバネ上平面加速度が大きいほど小さくなるように、それぞれ演算される。したがって、バネ上平面加速度が大きい場合、ロール重みWφおよびピッチ重みWθが小さくなる分だけ、乗り心地制御モータ力FMziが見かけ上小さくなる。このため意図しない乗り心地制御を抑えることができる。
(もっと読む)
ショックアブソーバ装置
【課題】 バネ下共振周波数帯域の振動伝達特性が改善された電気式ショックアブソーバ装置を提供すること。
【解決手段】 バネ上部材に連結された筒状部材31にブッシュ34を介して電気モータ33が吊り下げられ、ブッシュ34および電気モータ33によりダイナミックダンパが構成される。このため、このダイナミックダンパの共振周波数がバネ下共振周波数に近づくようにブッシュ34の弾性定数kや電気モータ33の重量を調整することにより、バネ上部材へのバネ下共振周波数付近の振動伝達特性が改善される。
(もっと読む)
車両の電磁サスペンション装置
【課題】単相リニアモータを一層効率的に駆動制御し、消費電力を更に低減し得る電磁サスペンション装置を提供する。
【解決手段】単相リニアモータLMの磁石部材MGを囲繞するように軸方向に並設した二つのコイルCL1,CL2と、これらのコイルが隣接する側の端部近傍で開口する二つのスリットSL1,SL2を有するヨークYKを具備し、少なくとも検出手段SNの検出結果に基づき、磁石部材の軸方向中央部NEが二つのスリット間に位置するときには、二つのコイルに通電し、上記軸方向中央部が二つのスリットの一方側近傍の所定位置を越えたときには、一方側のスリットを介して磁気回路を形成するコイルのみに対し、二つのコイルへの通電時とは逆方向に通電する。
(もっと読む)
車両の電磁サスペンション装置
【課題】単相リニアモータを一層効率的に駆動制御し、消費電力を更に低減し得る電磁サスペンション装置を提供する。
【解決手段】単相リニアモータLMの磁石部材MGを囲繞するように軸方向に並設した二つのコイルCL1,CL2と、これらのコイルと磁気回路を形成する二つのスリットSL1,SL2を有するヨークYKを具備し、少なくとも検出手段SNの検出結果に基づき、磁石部材の軸方向中央部NEが二つのスリット間に位置するときには、二つのコイルに対し所定方向に通電し、上記軸方向中央部が二つのスリットの一方側近傍の所定位置を越えたときには、上記の通電時とは逆方向に通電し、単相リニアモータとしての推力を発生する。
(もっと読む)
車両用サスペンション装置
【課題】 電磁式ショックアブソーバ30で発生させる減衰力の可変幅を拡げる。
【解決手段】 電磁式ショックアブソーバ30の伸縮動作に伴って発生する逆起電力によりモータ40に発電電流を流すための外部回路100を備える。外部回路100は、電磁式ショックアブソーバ30の圧縮動作時に第1端子t1から第2端子t2に発電電流が流れる第1接続路と、伸長動作時に第2端子t2から第1端子t1に発電電流が流れる第2接続路とを備える。第1接続路は、第1可変抵抗器VR1と第1可変コンデンサVC1との並列回路を備え、第2接続路は、第2可変抵抗器VR2と第2可変コンデンサVC2との並列回路を備える。
(もっと読む)
サスペンション装置
【課題】 温度条件に応じて最適な目標モータ力を出力するサスペンション制御装置を提供すること。
【解決手段】 液圧式ダンパ装置40の作動液の温度Tが検出され(S1)、次いで、液温−減衰係数マップを参照して減衰係数Csが決定される(S2)。その後、決定された減衰係数Csが(9)式中の直列伝達補償用伝達関数に代入され(S3)、さらに(9)式に基づいて目標モータ力fmotor*が計算される(S4)。そして、計算された目標モータ力fmotor*に対応する制御信号が出力される(S5)。作動液の温度に応じて適切な目標モータ力fmotor*が演算されるために、作動液の温度に起因する乗り心地の悪化が抑えられる。また、過剰な目標モータ力が要求されることが防止されるため、無駄な消費電力の発生が抑えられるとともに、過剰な目標モータ力による電気モータおよびその周辺のハード部品への熱害の影響を低減することができる。
(もっと読む)
車両のサスペンション装置
【課題】 電磁式ショックアブソーバに使用するブラシ付モータのブラシ部の耐久性を向上させる。
【解決手段】 車両が停止しているときにモータ回転角度θmを所定の周期でサンプリングし、設定車高に対応する基準モータ回転角度θm0と、サンプリングしたモータ回転角度θmとの角度差βを表すデータを蓄積する(S20〜S25)。角度差βのデータ数が所定数に到達したとき(S23:Yes)、角度差βの度数分布が平均化するような車高変更量ΔHを算出し(S27)、この車高変更量ΔHをエアばね制御部に指令する(S28)。これにより、目標車高が変更されて、モータの各整流子におけるブラシとの接触頻度が平均化される。
(もっと読む)
1 - 20 / 160
[ Back to top ]