
Fターム[3F016CD05]の内容
コンベア間の中継−直交型 (335) | 回転移載手段 (30) | 水平軸まわりに(垂直面内で)回動 (10)
Fターム[3F016CD05]の下位に属するFターム
移載ローラによるもの (2)
チェーンコンベアにフリーローラを設けたもの (1)
ローラの周面にフリーローラを設けたもの
Fターム[3F016CD05]に分類される特許
1 - 7 / 7
供給装置
【課題】適切なタイミングで物品を供給する。
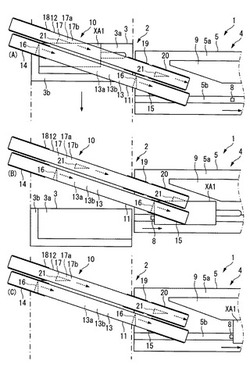
【解決手段】供給装置10は、冷菓XA1を搬送するバケットコンベア2の搬送面3aの上方に、バケットコンベア2の流れ方向と交差するように配置される環状の第一のベルト13と、この第一のベルト13からバケットコンベア2の搬送面3aに突出するように設けられ、第一のベルト13が走行することによって、バケットコンベア2の搬送面3a上の冷菓XA1を押し進める押し部材16と、を備えている。第一のベルト13は、バケットコンベア2の下流側に近付く方向で、かつバケットコンベア2の搬送面3aの側方に配置されるフィンガーコンベア4の方向に傾けた方向に走行する進行領域13aを有する。
(もっと読む)
レバー旋回式移載装置

【課題】鋼管や丸棒の搬送ラインにおいて用いられる移載装置として、効率的に鋼管や丸棒の移載を行うことができるレバー旋回式移載装置を提供する。
【解決手段】方向制御弁21から第2油圧シリンダー13bの間でかつ第1油圧シリンダー13a分岐以降のA系統配管とB系統配管のそれぞれにシャットオフ弁23が組込まれており、これによって、移載する鋼管30の負荷(寸法、重量)に応じて、駆動させる油圧シリンダー13の数を変更できるようになっている。
(もっと読む)
マルチセグメントフィルタの製造プロセスにおけるフィルタセグメントの安全移送方法
マルチセグメントフィルタの製造にあたり、適正に調製されたセグメント(1)を、送り出しゾーン(2)を通って分離ユニット(5)を備えた分離ゾーン(4)に移送し、次に、軸線(10)に取り付けられていて移送ユニット(11)を構成する回転円板(9)のドライバ(8)相互で移送し、中断ユニット(T)で移送ユニット(11.)により中断し、中断ユニット(T)においてセグメントを個々に、移送ゾーン(12)を通って配置ゾーン(4)に移送し、配置ゾーン(4)においてセグメントをグループ分けベルト(13)の水平軌道上に位置決めし、いずれかのゾーン(2,4,7,12,14)内における且つ/或いはゾーン相互間におけるフィルタセグメント(1)の不正確な流れの場合、少なくとも1つのゾーン内におけるフィルタセグメントの移送を中断し、それによりフィルタ製造プロセスを停止する。不正確な流れの検出は、各ゾーン内におけるモータの駆動トルクをチェックすることにより各種機構体の動作に対する抵抗をチェックすることによって、或いは移送ユニット(11)及び/又は分離ユニット(5)内に固定された位置センサ(17)により各種機構体の位置の変化をチェックすることによって行なわれる。プロセスの中断は、フィルタセグメント(1)の流れ軌道からの移送ユニット(11)及び/又は分離ユニットの取り出しによって行われ、取り出しは、空気圧シリンダが移送ユニット(11)を移送ユニット(11)の回転軸線(10)に平行な軸線を備えたその案内(16)に沿って動かすことにより、或いは空気圧シリンダが移送ユニットを案内の軸線回りに回転させることにより行なわれる。案内に一緒に取り付けられた移送ユニット及び分離ユニットは、移送ユニットの回転軸線に垂直な軸線の案内に沿って動くことにより或いは移送ユニットの回転軸線に平行な案内の軸線回りに回転することにより取り出し可能である。 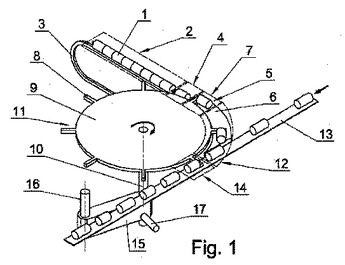 (もっと読む)
(もっと読む)
電着金属の移載装置
【課題】 アイザー法によって精製された電着金属を従来の作業効率を損なうことなく且つ載せ替えの際における落下等の事故を未然に防止できる安全性の高い電着金属の移載装置を提供することを目的とする。
【解決手段】 電解精錬によって精製され、陰極板1から剥ぎ取られた電着金属2を搬送コンベア7に移載する電着金属の移載装置20は、先端部23が三次元的に方向転換可能に形成された多関節形ロボット21と、多関節ロボット21の先端部23に取り付けられる電着金属2を保持する保持手段30であって、電着金属2の表面を吸着して保持する吸着チャック31と、吸着保持された電着金属2が落下するのを防止する落下防止用爪41を備えた保持手段30を含み構成されてなる。
(もっと読む)
物品仕分装置
【課題】物品仕分装置1において、複数の搬送ユニット3に跨った物品Mをもスムーズに分岐コンベヤライン4に搬出できるようにする。
【解決手段】搬送コンベヤライン2のうち仕分箇所よりも搬送上流側に、1又は複数の搬送ユニット3に跨っている1つの物品Mに関する情報を検出するための物品位置検出センサ5を配置する。更に、1つの物品Mを載せた1又は複数の搬送ユニット3が仕分箇所に到達したときに、物品位置検出センサ5からの形態情報に基づいて、1つの物品Mに対応した全ての搬送ユニット3のクロスベルトソータ11を同期して作動させるコントローラを備える。この場合、搬送コンベヤライン2中の仕分箇所にて、仕分対象となる物品Mの長さLに合わせて各搬送ユニット3のクロスベルトソータ11を作動でき、例えば複数の搬送ユニット3に跨って載置された物品Mでも、スムーズ且つ確実に分岐コンベヤライン4に搬出できる。
(もっと読む)
鋼管の移送方法および装置
【課題】鋼管移送の全自動化を可能にする鋼管の移送方法および装置を提供する。
【解決手段】管長方向移送にコンベア1,3、管径方向移送に傾斜付きスキッド2、およびコンベアとスキッド間の管受渡しに複数のレバー4,5,6,7をそれぞれ用い、これらレバーにはスキッド上を転がってくる管20を受け止めるストッパレバー6の配列が含まれる、鋼管の移送方法において、ストッパレバー6の手前の位置の管通過タイミングをセンサ8で検出し、該センサの検出結果に基づいてタイマ9によりストッパレバー6の傾転動作を管緩衝動作モードに制御する。
(もっと読む)
ワーク搬送装置
【課題】 回路基板上に実装するチップ部品などの微細なワークを確実に連続搬送することができ、かつ、操作も簡易であるワーク搬送装置を、より低価格で実現する。
【解決手段】 垂直ホイル10の周面部に、ワークを吸着保持するL字状溝に形成された多数の吸着部11を設ける。吸着部11におけるワークを載置する載置面が、垂直ホイル10の最上点である位置P1において水平面に対して15度傾斜するように形成する。、吸着部11へのワークの供給を、断面L字状のガイドによりガイドする。ガイドにおけるワークを載置する載置面が、水平面に対して15度傾斜するように形成する。垂直ホイル10により搬送されたワークを、これを吸着保持する多数の吸気孔22がリム部21上面に開口する水平ホイル20に移載して搬送する。
(もっと読む)
1 - 7 / 7
[ Back to top ]