
Fターム[3F044AB09]の内容
コンベア間の中継 (1,950) | 目的、機能 (448) | 滞留(アキュムレート) (29) | 滞留量(容量)可変 (3)
Fターム[3F044AB09]に分類される特許
1 - 3 / 3
ロール体搬送装置
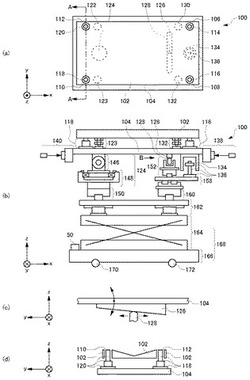
【課題】ロール体の受け取りをよりスムーズに行う。
【解決手段】ロール体搬送用無人搬送車100は、ターレットによって空中に支持されているロール体の胴部に鉛直方向下側から接触する載置台102と、載置台102にかかる荷重を検出する荷重検出部と、荷重検出部によって検出される荷重に基づいて、載置台102がロール体を押す力を調整する荷重調整部と、を備える。荷重調整部は、荷重検出部によって検出される荷重がロール体の重量に近づくように、載置台102がロール体を押す力を調整する。
(もっと読む)
カートニングマシン

【課題】生産性を向上させつつ扁平に折り畳まれたカートンの位置決めを正しく行うことができるカートニングマシンを提供する。
【解決手段】カートニングマシン1は、扁平カートンCfを重ねて収容するカートンマガジン11と、カートンマガジン11から引き出された扁平カートンCfを搬送する搬送コンベア13と、搬送コンベア13による搬送の慣性で移動を続け得る扁平カートンCfの移動を止めて箱形に開く位置を決定する位置決めガイド14と、搬送コンベア13に搬送されている扁平カートンCfを吸着保持して位置決めガイド14まで届けるバキュームコンベア15とを備える。而して、生産性向上のために搬送速度を上昇させても、バキュームコンベア15が扁平カートンCfを吸着保持して位置決めガイド14まで届けることで、搬送コンベア13による搬送の慣性で扁平カートンCfが飛ばされ跳ね返ることを回避でき、位置決めを正しく行うことができる。
(もっと読む)
搬送装置
【課題】搬送する物品の製造効率を低下させることなく、制御を簡単として貯留する物品の数量に応じた搬送経路長を容易に得ることができ、しかも、搬送ベルトにかかる負荷が軽減でき、構造が簡単でコンパクトな搬送装置を提供する。
【解決手段】保持プーリ14に掛け渡した牽引ベルト12の各端に第1移動部材16と第2移動部材17とを設ける。第1移動部材16に第1可動プーリ18を、第2移動部材17に第2可動プーリ19を設ける。第1駆動プーリ4と、第2駆動プーリ5と、両可動プーリ18,19に無端状の搬送ベルト22を掛け渡して設ける。第1駆動プーリ4のみを停止させたとき、第1移動部材16が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が短縮し、第2駆動プーリ5のみを停止させたとき、第2移動部材17が両駆動プーリ4,5に接近する方向に移動して搬送ベルト22の往路長が伸長する。
(もっと読む)
1 - 3 / 3
[ Back to top ]