
Fターム[3F072GE04]の内容
Fターム[3F072GE04]に分類される特許
1 - 4 / 4
搬送装置
【課題】搬送対象体をスムーズに搬送し得る搬送装置を提供する。
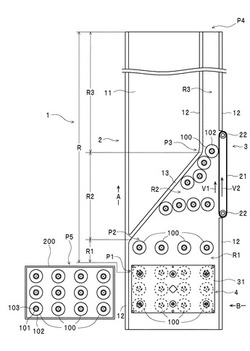
【解決手段】搬送ベルト11上の供給位置P1に供給されたリール部品100を目的位置P4に搬送するベルトコンベア2と、リール部品100を磁力によって吸着する吸着部31および吸着部31を供給位置P1の上方に移動させる移動機構を有して移動状態の搬送ベルト11上の供給位置P1にリール部品100を供給する供給装置4とを備え、吸着部31は、複数のリール部品100を吸着した状態で供給位置P1に位置しているときに、各リール部品100に対する吸着状態および非吸着状態を切り替えて各リール部品100を複数回に分けて供給位置P1に供給する。
(もっと読む)
搬送装置

【課題】電力消費量を抑えて、省電力を実現することが可能な搬送装置を提供する。
【解決手段】商品処理システム1における箱詰部6は、搬入コンベア53と、アーム部材と、制御システムとを備えている。搬入コンベア53は、商品Xを搬送する。アーム部材は、商品Xを吸引して保持するためのブロアを有し、所定の経路を移動可能に配置されている。制御システムは、搬入センサ22からの受信信号を受信してから第1所定時間が経過した時に、搬入コンベア53を停止させるように制御し、第2所定時間が経過した時に、ブロアを停止させるように制御している。
(もっと読む)
吸着ヘッドの駆動方法
【課題】自動分析装置のような高速処理が求められる装置に使用される吸着ヘッドを駆動方法において、吸着の成功率を高めることを目的とする。
【解決手段】負圧により反応容器31を吸着する容器ピックアップ装置21の駆動方法であって、反応容器31に対する吸引力を発生し得ると推定される吸引推定領域に設定された予備位置に容器ピックアップ装置21を配置した状態で、容器ピックアップ装置21に負圧を加える第1のステップと、該第1のステップにおいて容器ピックアップ装置21により反応容器31を吸着できなかった場合には、容器ピックアップ装置21に負圧を加えた状態で、前記吸引推定領域において容器ピックアップ装置21を移動させる第2のステップと、を有することを特徴とする容器ピックアップ装置21の駆動方法。
(もっと読む)
海苔束90度回転・整列方法及び装置
【課題】簡単な構造で海苔束90度回転動作と整列動作の速度を上げて高速処理に対応する。
【解決手段】集束装置から落下した海苔束8を受けて90度回転する受け板10と、上死点から下降する受け板10から90度向きを変えた海苔束8の積載時に停止し、載置後に始動して搬出する第1の搬送コンベヤ9を備えた海苔束90度回転装置と、搬送コンベア9で搬出される海苔束8を搬送し、整列時に停止し、整列後に海苔束を搬出する第2の搬送コンベヤ27と、進入する海苔束8を停止させるストッパ29と、海苔束8を叩いて整列する揃え板28と、進入してくる海苔束8を検知する進入センサ30を備えた整列装置と、第1の搬送コンベア9及び受け板10の停止動作及び始動動作の開始時間を計時する第1のタイマと第2の搬送コンベア27、ストッパ29及び揃え板28の停止動作及び始動動作の開始時間を計時する第2のタイマを備える。
(もっと読む)
1 - 4 / 4
[ Back to top ]