
Fターム[3F077EA19]の内容
船舶の荷積み、荷おろし (441) | 荷役装置の制御;検出、及び荷役方法 (101) | 位置の検出をおこなっているもの (15)
Fターム[3F077EA19]の下位に属するFターム
荷役装置と船舶との相対位置 (5)
荷、船底の位置 (2)
Fターム[3F077EA19]に分類される特許
1 - 8 / 8
自動車運搬船における車両管理装置
【課題】背打ち防止警報機能と、車両カウント機能と、速度制御警報機能という3つの機能を簡単な構成でもって発揮させる。
【解決手段】車両の通過を検出する第1〜第3のセンサー11〜13を、ランプウェイまたは船内車両通路に対し入庫方向に沿って間隔を存して順に設置する。第2のセンサー12は、第1および第3のセンサー11,13よりも高い位置に設置される。制御ユニット16は、第1〜第3のセンサー11〜13よりの信号を受け背打ち防止警報機能、カウント機能および速度制限警報機能を発揮する。
(もっと読む)
リーファーコンテナの荷役方法、及びその荷役制御システム

【課題】電源ケーブルの連結を解除する解放作業を行う作業員と、荷役作業を行うクレーンオペレータが有する情報を共有化し、リーファーコンテナの電源ケーブルの切断事故を防止し、荷役作業の安全性の高いリーファーコンテナの荷役方法を提供する。
【解決手段】コンテナターミナル1で荷役するリーファーコンテナ5Rの荷役方法において、リーファーコンテナ5Rの電源ケーブル6の接続の状態を、リーファーコンテナの管理システム10で収集する接続情報収集ステップと、接続情報をコンテナターミナル制御システム4に送信するデータ蓄積ステップと、リーファーコンテナ5Rの荷役を行う岸壁クレーン3又は門型クレーン25が、コンテナターミナル制御システム4から接続情報を車載端末14で受信する受信ステップと、接続情報を基に、岸壁クレーン3又は門型クレーン25で、リーファーコンテナ5Rを荷役する荷役作業ステップを有する。
(もっと読む)
陸揚げコンベアの搬出位置調整システム
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】陸揚げコンベア3がシャトルコンベアであって、その陸揚げコンベヤ3の搬出端31に備えた搬入ホッパ6との間の距離を測定するための伸縮方向位置センサー8と、この伸縮方向位置センサー8からの測定信号により陸揚げコンベア3の伸縮機構33を制御して陸揚げコンベアを伸縮させる制御装置9とからなる陸揚げコンベア伸縮装置10を備えた。
(もっと読む)
ブームコンベアの搬出位置調整手段
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】ブームコンベア7の搬入端71に備えられた搬入ホッパ6との距離を測定するための横方向位置センサー8a,8bと、横方向位置センサー8a,8bからの測定信号により旋回機構9を制御する制御装置10とからなり、陸揚げ作業時において船体が移動して陸揚げコンベア7の排出端71が搬入ホッパ6の中央位置からずれたとき、制御装置10が記横方向位置サンサー8a,8bから送信される測定信号に基づいて旋回機構9を所定の方向へ所定角度だけ駆動させることにより陸揚げコンベア7を旋回させてその排出端71を元の位置に復帰させる。
(もっと読む)
陸揚げコンベアの搬出位置調整手段
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】陸揚げコンベア3の搬出端31に伸縮機構131により伸縮する伸縮シュート13が付設されているとともに陸揚げコンベア3の搬出端31と搬入ホッパ6との間の距離を測定するための高さ位置センサー7と、高さ位置センサー7からの測定信号により伸縮機構131を制御して伸縮シュート13を伸縮させる制御装置10とからなる。
(もっと読む)
ばら物運搬船の陸揚げ時における船体の位置調整システム
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】積載したばら物を埠頭4側に備えた搬入ホッパ6に搬出する陸揚げコンベア3が船体に備えられているとともに、船体2の前方及び後方にそれぞれ配置されている船体2と埠頭4との間の高さを測定するための高さ方向位置センサー9a,9bと、給排水機111a,111bを備えて船体2に形成されるバラストタンク11a,11bと、高さ方向位置センサー9a,9bからの測定信号により給排水機111a,111bを制御して船体の喫水を変化させる制御装置10とからなる喫水位置調節装置を備えた。
(もっと読む)
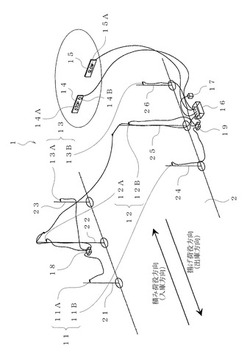
荷役用クレーンの制御装置
【課題】コンテナ等の荷役作業における巻上げ量とスプレッダ等の支持手段の方向とを適切に制御することにより、荷役効率を大幅に向上させることができる荷役用クレーンの制御装置を得る。
【解決手段】船に設置された複数の船体用GPSアンテナ22a及び22bと、船と陸との間で荷物を積み降ろすクレーン5に設けられたクレーン用GPSアンテナ14と、クレーン5に設けられ、荷物を所定の方向から支持する支持手段と、船体用GPSアンテナ及びクレーン用GPSアンテナ14により検出された各位置データに基づいて、荷物の横行時の障害物高さ及び横行される荷物の下面高さを演算し、複数の船体用GPSアンテナ22a及び22bにより検出された各位置データに基づいて、荷物の傾斜を演算する演算手段21とを備え、演算手段21の演算結果に基づいて、クレーン5の巻上げ量及び支持手段の傾斜を制御する。
(もっと読む)
アンローダ運転方法の演算装置およびアンローダの運転方法
【課題】 荷役中断時間を低減させるとともに、荷役の効率を向上させるアンローダ運転方法の演算装置およびアンローダの運転方法を提供する。
【解決手段】 アンローダ運転方法の演算装置10は、アンローダおよびブルドーザを用いて複数の船倉内にあるばら物を荷役するアンローダ運転方法の演算装置であって、荷役条件が入力される荷役条件入力部12と、前記荷役条件入力部12から前記荷役条件を取得し、前記荷役条件からアンローダおよびブルドーザの荷役時間を求めて、前記荷役時間と前記アンローダが船倉間を移動する船倉替えパターンとに基づいて、複数の前記船倉を荷役する前記アンローダと前記ブルドーザとの前記荷役時間をバランスさせた前記アンローダの運転方法を演算する運転方法演算部14と、前記運転方法演算部14に接続され、前記運転方法演算部14の演算結果を出力する運転方法表示部16と、を備えた構成である。
(もっと読む)
1 - 8 / 8
[ Back to top ]