
Fターム[3F081BC20]の内容
コンベア上の物品の姿勢制御 (7,432) | 整列 (531) | その他 (4)
Fターム[3F081BC20]に分類される特許
1 - 4 / 4
ワーク搬送装置
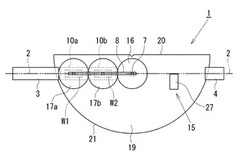
【課題】構造を簡素化して、効率的に搬送ライン上のワークの順序を変更することのできるワーク搬送装置を提供する。
【解決手段】本ワーク搬送装置1は、モータ6の回転軸7に連結され、該回転軸7と直交する方向に延びる支持アーム8と、該支持アーム8に連結され、搬送ライン2からのワークW1、W2が載置される第1及び第2コンベア10a、10bとを備えているので、モータ6の駆動により支持アーム8と共に第1及び第2コンベア10a、10bを略180°回転させれば、搬送ライン2から受け入れたワークの順序(ワークW2→ワークW1)を入れ替えて(ワークW1→ワークW2)搬出部4に搬出することができる。
(もっと読む)
円柱形物体の搬送装置

【課題】円柱形物体1を,その軸線1bの回りに回転しながら搬送する搬送装置において,その装置の小型化等を図る。
【解決手段】平行に延びるように配設した少なくとも二本の搬送コンベア4,5を備え,この各搬送コンベア4,5を,同じ方向に速度を変えて駆動することにより,前記円柱形物体1を,その軸線1bの回りに回転しながら搬送する。
(もっと読む)
パーツ供給装置
【課題】パーツの形状や種類に特化しない汎用性の高いパーツ供給装置を提供する。
【解決手段】搬送コンベア22によって搬送されたボルトを、カメラ24によって画像認識し、画像認識されたボルトをロボット26によって次工程に移送するボルト供給装置1において、ホッパー10から螺旋フィーダ14を介して搬送されるボルトを第1貯留箱16に一時貯留し、第1貯留箱16の重量を第1重量計測装置18が計測し、第1重量計測装置18が一定重量を計測した場合に、搬送コンベア22に対して第1貯留箱16のボルトを供給するようにしたことにより、搬送コンベア22におけるボルトの量が、後流側のカメラ24における画像認識精度を保つ程度の量となるように調整することが可能になる。このように、ボルトの姿勢を整えるための装置を必要とせず、重量の計測によるボルトの供給量の制御のみでカメラ24による認識精度を保つことが可能になる。
(もっと読む)
形鋼の幅寄せ方法および幅寄せ装置並びに段積み装置
【課題】形鋼の簡単な幅寄せを行なうことができる幅寄せ方法および幅寄せ装置を提供する。
【解決手段】装置フレーム26に枢支した3つの幅寄せ部材27,28,29の夫々は、油圧シリンダ30,31,32によって独立して傾動される。幅寄せ部材27,28,29に幅寄せ体34,36,37が配設される。幅寄せ体34,36,37に、複数の山形部35がレールの幅方向に沿って設けられる。第1幅寄せ部材27で移送コンベヤからレールを押上げることで、レールを傾動させつつ幅寄せする。第2幅寄せ部材28で第1幅寄せ部材27からレールを押上げることで、レールを幅寄せする。第3幅寄せ部材29で第2幅寄せ部材28からレールを押上げることで、レールを幅寄せする。第3幅寄せ部材29を下動することで、幅寄せしたレールは座部が上下に重なった状態で移送コンベヤの載置面に載置される。
(もっと読む)
1 - 4 / 4
[ Back to top ]