
Fターム[3F112VB02]の内容
線材用巻芯等の交換、搬送、口出し (1,564) | 装置の管理、自動化に係る作用効果 (40) | 自動化 (7)
Fターム[3F112VB02]に分類される特許
1 - 7 / 7
巻取装置
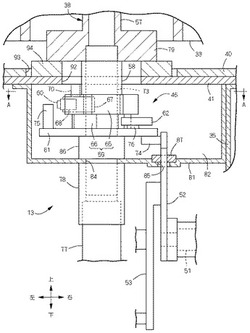
【課題】ボビン供給部のマガジンの駆動機構に風綿が付着することを防いで、風綿を手作業で除去するメンテナンスの手間を省くことができる巻取装置を提供する。
【解決手段】巻取装置は、糸2が解舒されるボビン1を保持する給糸部11と、給糸部11に保持されるボビン1から解舒された糸2を巻取管3に巻き取る巻取部12と、給糸部11にボビン1を供給するボビン供給部13とを備えている。ボビン供給部13は、複数のボビン1を収容可能なマガジン33と、マガジン33から給糸部11へボビン1を案内するガイドシュート34と、マガジン33を回転させる駆動機構46とを含む。駆動機構46を、マガジン33を支持するベース41の下面側に配置し、ベース41に装着した防塵カバー81により密閉状に覆う。
(もっと読む)
自動ワインダ

【課題】給糸ボビン準備作業の前後における各巻き取り装置の運転/停止スイッチの切り替え作業を省略できる自動ワインダを提供する。
【解決手段】自動運転により給糸ボビンB1から糸Yを巻き取ってパッケージPを形成する複数の巻き取り装置10と、複数の巻き取り装置10の動作を制御する機台制御本体5と、を具備し、巻き取り装置10は、自動運転による巻取り作業の実行または停止を切り替える自動運転スイッチ12と、を具備し、機台制御本体5は、複数の巻き取り装置10の自動運転スイッチ12の切り替え状態によらず、給糸ボビンB1の準備作業を実行可能な状態にする給糸ボビン準備モードへ移行させる制御部50と、を具備する自動ワインダ100。
(もっと読む)
線材のボビン結束装置及びその装置を用いたボビン自動巻取装置
【課題】ボビンに巻着けた線材を、人手を用いずに全て機械的に結束可能とする装置を提供する。
【解決手段】基盤29に、前面の周辺寄り部位に輪潜りクリップ14を設けた結束ヘッド5を回転可能に設け、結束ヘッド5にボビン2を挟持可能に対向したボビンチャックのうち一方側のボビンチャック7aを結束ヘッド5の回転方向とは逆方向に回転可能に設けるとともに、ボビンチャック7aと対向して出没するボビンチャック7bを従動回転可能に設ける。前記輪潜りクリップ14は、中心部の掛止部14aがその外側の掛止包持部14bから出没して該掛止部14aと掛止包持部14bとの間に線材Wを挟持及び離脱を可能とし、その掛止包持部14bの外周部に線材を掛け止め可能な線材外掛内筒部14cを備え、線材外掛内筒部14cの外周には線材外掛内筒部14cの先端まで先端部を出没可能とする線材押出外筒部14dを備える。
(もっと読む)
ボビン取付装置
【課題】ボビンを巻取り回転部材に取り付けるときにボビン取付装置が完全に停止することなく、自動で取付動作をリトライ可能とするボビン取付装置を提供する。
【解決手段】ボビン取付手段によりボビンの片側のフランジ表面に設けられた係合部を巻取り回転部材又は巻出し回転部材の係合体方向に前進させて係合させるボビン取付装置において、ボビン取付手段に設けられ、一端側が係合体方向を向き前記前進方向に変位する変位部材と、変位部材の変位量を測定する測定手段と、ボビンの前進時に係合体が係合部以外の部位に衝突したときの変位量に基づきボビン取付手段を制御し、ボビンを後退させる制御手段とを備えるようにした。
(もっと読む)
線材巻取り用スプール、これを用いた線材の巻取り装置および線材の巻取り方法
【課題】線材を巻き取った後の線材端末の引き出し工程についても自動化することができ、これにより作業効率を向上することが可能な線材巻取り用スプール、これを用いた線材の巻取り装置および線材の巻取り方法を提供する。
【解決手段】線材を巻き取るためのスプール10である。一方のフランジ部11aの外側に、フランジ部11aとの間で線材を挟持可能であって、略十字形にフランジ部11aを覆うクリップ12が固設され、かつ、フランジ部11aの、クリップ12に覆われていない縁部のうち少なくとも一箇所に、切欠き部13が設けられている。
(もっと読む)
自動綾巻き装置における巻き返し過程のために、紡績装置で形成された紡績コップを準備するための方法並びに該方法を実行するための装置
【課題】糸端部収容の試みに成果が見られない場合に糸端部収容ステーションで紡績コップが回転する最大回転数を、紡績コップの実際の状態に適合させ、準備装置の処理能力を最適化できるような方法及び装置を提供する。
【解決手段】綾巻き装置のために紡績コップを準備する方法であって、糸端部剥離ステーションと、糸端部収容ステーションとが設けられており、糸端部収容ステーションがセンサ装置を有しており、センサ装置17が糸端部収容の成功を検知するまでに各紡績コップ16が糸端部収容ステーション12で回転する回転数を検出し、制御装置15に送り、制御装置において糸端部収容ステーション12における紡績コップ16のこのような回転の平均的な回数の平均値を検出し、この平均値に基づき、糸端部収容ステーション12において糸端部収容が行われない状態で、後続の紡績コップ16が回転する際の最大回転数を設定する。
(もっと読む)
玉揚げ装置を有する繊維機械
【課題】玉揚げ作業の目標設定において、玉揚げ装置の走行制御機構の負担を軽減しようとすると、巻取りユニットの稼動効率を低下させてしまう。
【解決手段】各巻取りユニット2におけるパッケージ7の巻取り長さの大小を認識する巻取り状態認識手段30bと、巻取り長さが満管にある巻取りユニット7を最優先に、次いで満管に近い巻取りユニット7を優先する順序で、玉揚げ作業の実行目標とする巻取りユニット2を設定する目標設定手段30cと、玉揚げ作業の実行目標とする巻取りユニット2に玉揚げ装置3が到達してから、その巻取りユニット2で形成されているパッケージ7が満管となるまで、玉揚げ装置3に玉揚げ作業の実行を待機させる作業待機手段30dと、を備える。
(もっと読む)
1 - 7 / 7
[ Back to top ]