
Fターム[3F115CA22]の内容
パッケージ・線条体の安全装置 (910) | 目的、機能 (242) | 異常に対する安全対策 (150) | 異常の種類 (113) | 巻戻し、走行異常 (65) | 過張力 (5)
Fターム[3F115CA22]に分類される特許
1 - 5 / 5
糸巻取装置及びテンション確認方法
【課題】 テンションセンサの測定精度を容易に確認することができる糸巻取装置及びそのような糸巻き取り装置を用いたテンションセンサの調整方法を提供する。
【解決手段】 給糸ボビンBの糸YをパッケージPに巻き取る巻取ユニット1であって、糸Yのテンションを測定するテンションセンサ6と、給糸ボビンBの糸YをパッケージPに巻き取る運転モード、及びテンションセンサ6によって測定された糸Yのテンションを確認するメンテナンスモードを含む複数の動作モードを相互に切り替える制御部15と、を備える。
(もっと読む)
線状部材のテンション測定装置及び測定方法

【課題】配列された複数本の線状部材のテンションを簡単な構成で連続的に順次測定できるようにする。
【解決手段】線状部材Sのテンションを測定可能な検出センサ10を、線状部材Sの長手方向と交差する方向に移動させ、ガイド部材11により移動方向前方側の線状部材Sを案内して、検出センサ10のテンションの検出部10Aに順次接触させる。このように順次接触する線状部材Sのテンションを検出センサ10により測定しつつ、検出センサ10を、複数本の線状部材Sの配列方向の一端側から他端側に向かって移動させて、線状部材Sのテンションを検出センサ10により移動方向に沿って連続的に順次測定する。
(もっと読む)
毛羽立ち度測定装置
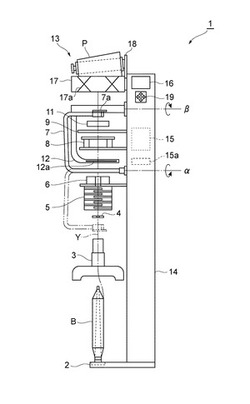
【課題】炭素繊維糸条に種々の加工を加える際に、炭素繊維糸条の表面に発生する毛羽立ちの程度を、実際の加工工程における毛羽立ちの程度に近い実用上有効な精度で測定できる炭素繊維糸条の毛羽立ち度測定装置を提供する。
【解決手段】走行中に擦動を加えられた炭素繊維糸条の毛羽立ち度を測定する装置であって、炭素繊維糸条の繰出しボビン(A)と、走行する炭素繊維糸条の張力測定装置(B)と、炭素繊維糸条がその走行軸を中心として螺旋運動するように、その内側面が炭素繊維糸条に擦動を加えながら該走行軸に垂直な面内を走行軸を中心として円運動する擦動リング(C)と、炭素繊維糸条を所定速度で引取る可変速度ローラー(D)と、炭素繊維糸条の毛羽立ち度を計測する毛羽立ち度計測装置(E)を備えた毛羽立ち度測定装置。
(もっと読む)
綾巻きパッケージを製造する繊維機械の作業部位を運転する方法
本発明は、綾巻きパッケージを製造する繊維機械の作業部位を運転する方法であって、綾巻きパッケージの巻取速度を調節するための回転数調整可能な巻取駆動装置が設けられており、供給ボビンから紡出される糸の糸張力を監視するための、作業部位計算機と接続された糸張力センサが設けられており、糸張力を調整するための糸テンショナが設けられている方法に関する。本発明によれば、作業部位計算機(32)で、所望の糸張力(FZKsoll)の値ならびに該所望の糸張力(FZKsoll)からの許容パーセント偏差の値(TG)を調節することができ、糸張力(FZKsoll)の許容パーセント偏差の超過が生じると、直ちに作業部位計算機(32)によって巻取過程を中断する。 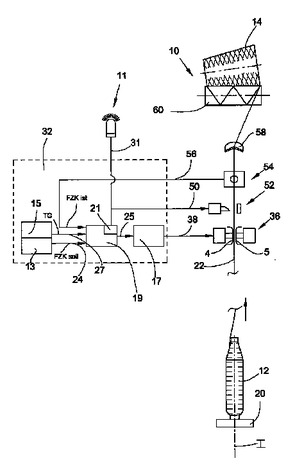 (もっと読む)
(もっと読む)
糸引出し装置
本発明は連続的に引出し可能な糸を準備するための糸引出し装置並びに該糸引出し装置を備えたテクスチャード加工機に関する。公知技術によれば糸引出し装置は少なくとも1つの給糸ボビンと少なくとも1つのリザーブボビンとを有している。この給糸ボビンとリザーブボビンの糸始端部と糸終端部は互いに結節されている。給糸ボビンからリザーブボビンに移行する引出された糸はセンサによって認識される。これは移行に際して不作用位置から告知位置へ動かされる可動な糸ガイドによって行なわれる。可動な糸ガイドのはね返えりを回避するためには、糸ガイドもしくは該糸ガイドに結合されたエレメントには第2の運動自由度が与えられている。適当に形成されたカーブによって2つの運動自由度は、糸ガイドが告知位置を後にすることが幾何学的に可能ではなくなるようにはね返えり後の運動がコントロールされるように協調される。 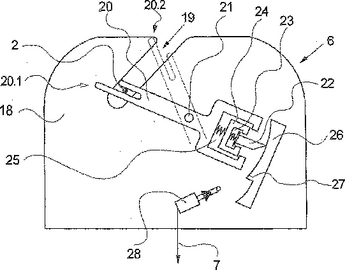 (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]